
技术摘要:
本发明一种扳机控制方法及系统,所述方法包括如下步骤:步骤1、生成并发送决策指令;步骤2、接收决策指令并对其进行判断,根据判断结果控制扳机动作;其中,控制电路控制扳机动作的决策指令包括锁止指令和射击指令;若所述控制指令为锁止指令时,则作动器限制控制杆运 全部
背景技术:
枪械指利用火药燃气能量发射弹丸,口径小于20毫米(大于20毫米定义为"火炮") 的身管射击武器。以发射枪弹,打击无防护或弱防护的有生目标为主。是步兵的主要武器, 也是其他兵种的辅助武器。 枪械属于单兵装备,是单兵遂行近距离作战任务的主要火力,在装备体系中占据 着主要地位。经过近百年的发展,枪械自身的性能已接近极限,特别是有效射程及射击精度 难以有效提升,满足不了日益增长的要求。 现有技术中的枪械的发动射击需要根据使用枪械者主动判断扣动扳机的时机进 行射击,在具体射击的过程中最主要的判断依据是使用枪械者的经验,很难考虑到实际过 程中的环境因素以及目标的运动情况,进而导致射击的命中率很低,效果较差。
技术实现要素:
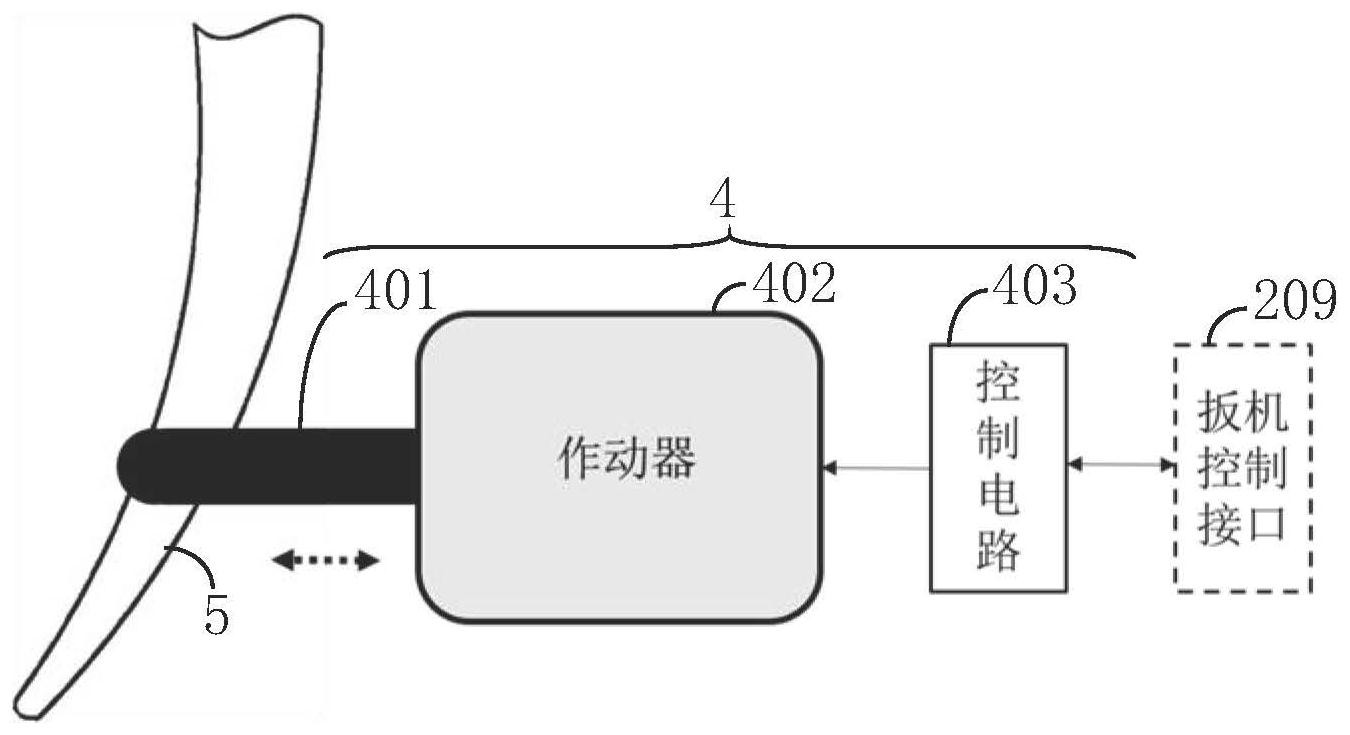
针对上述问题,本发明提出一种扳机控制方法,所述方法包括如下步骤: 步骤1、生成并发送决策指令; 步骤2、接收决策指令并对其进行判断,根据判断结果控制扳机动作; 其中,控制电路控制扳机动作的决策指令包括锁止指令和射击指令;若所述控制 指令为锁止指令时,则作动器限制控制杆运动,扳机锁止;若所述控制指令为射击指令时, 则控制电路驱动作动器,带动控制杆运动,下压扳机,进行射击。 优选地,所述生成发送决策指令包括: 获取数据信息,并传送至弹道计算-射击控制计算单元; 弹道计算-射击控制计算机接收数据信息进行运算得出决策指令,并发送至控制 电路。 优选地,所述数据信息包括目标距离数据信息、气象诸元数据信息、枪械姿态及运 动数据信息。 优选地,生成射击指令的具体步骤为: 步骤11:以当前判定时刻瞄准点与锁定点距离和上一判定时刻瞄准点与锁定点距 离计算指令响应滞后时间T2后预测瞄准点与锁定点距离; 步骤21:判断预测瞄准点与锁定点的距离Rx是否小于设定值R,根据判断结果执行 处理步骤,所述处理步骤包括:若Rx<R,则形成射击指令;若Rx≥R,则将下一时刻瞄准点及 锁定点数据更新为当前时刻数据,返回步骤11。 优选地,所述计算指令响应滞后时间T2后预测瞄准点与锁定点距离的公式如下所 示: 4 CN 111609753 A 说 明 书 2/8 页 其中, 式中: T2为指令响应滞后时间; Rx为指令响应滞后时间T2后预测瞄准点与锁定点距离; Ri为当前判定时刻瞄准点与锁定点距离; Ri-1为上一判定时刻瞄准点与锁定点距离; T1为判定计算周期; xai、yai为当前时刻瞄准点横坐标、纵坐标; xmi、ymi为当前时刻锁定点横坐标、纵坐标; xai-1、yai-1为上一时刻瞄准点横坐标、纵坐标; xmi-1、ymi-1为上一时刻锁定点横坐标、纵坐标。 本发明还提供一种扳机控制系统,所述系统包括:指令生成模块和控制模块: 指令生成模块,用于生成并发送决策指令; 控制模块,用于接收决策指令并对其进行判断,根据判断结果控制扳机动作;其 中,控制电路控制扳机动作的决策指令包括锁止指令和射击指令;若所述控制指令为锁止 指令时,则作动器限制控制杆运动,扳机锁止;若所述控制指令为射击指令时,则控制电路 驱动作动器,带动控制杆运动,下压扳机,进行射击。 优选地,所述指令生成模块包括: 信息采集单元,用于获取数据信息,并传送至弹道计算-射击控制计算单元; 弹道计算-射击控制计算单元,用于接收信息采集单元发送的数据信息进行运算 得出决策指令,并发送至控制模块。 优选地,所述数据信息包括目标距离数据信息、气象诸元数据信息、枪械姿态及运 动数据信息。 优选地,所述生成射击指令包括:预判单元:以当前判定时刻瞄准点与锁定点距离 和上一判定时刻瞄准点与锁定点距离计算指令响应滞后时间T2后预测瞄准点与锁定点距 离;判断单元:判断预测瞄准点与锁定点的距离Rx是否小于设定值R;处理单元:根据判断结 果执行处理步骤,所述处理步骤包括:若Rx<R,则形成射击指令;若Rx≥R,则将下一时刻瞄 准点及锁定点数据更新为当前时刻数据,预判单元重新预判。 优选地,所述计算指令响应滞后时间T2后预测瞄准点与锁定点距离的公式如下所 示: 其中, 5 CN 111609753 A 说 明 书 3/8 页 式中: T2为指令响应滞后时间; Rx为指令响应滞后时间T2后预测瞄准点与锁定点距离; Ri为当前判定时刻瞄准点与锁定点距离; Ri-1为上一判定时刻瞄准点与锁定点距离; T1为判定计算周期; xai、yai为当前时刻瞄准点横坐标、纵坐标; xmi、ymi为当前时刻锁定点横坐标、纵坐标; xai-1、yai-1为上一时刻瞄准点横坐标、纵坐标; xmi-1、ymi-1为上一时刻锁定点横坐标、纵坐标。 本发明提供的一种扳机控制方法及系统,相较于现有技术能够在瞄准目标前锁止 扳机,防止误发射;以及瞄准目标时,根据射击指令,自动下压扳机,完成射击。 本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变 得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在说明书、权利 要求书以及附图中所指出的结构来实现和获得。 附图说明 为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现 有技术描述中所需要使用的附图作一简单地介绍,显而易见地,下面描述中的附图是本发 明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根 据这些附图获得其他的附图。 图1示出本发明的扳机控制方法流程图; 图2示出了根据本发明实施例的电控部分逻辑关系框图; 图3示出了根据本发明实施例的本发明的扳机控制系统结构图; 图4示出了根据本发明实施例的瞄具结构图; 图5示出了根据本发明实施例的瞄具另一视角结构图; 图6示出了根据本发明实施例的扳机控制组件结构示意图; 图7示出了根据本发明实施例的目标运动角速率测量原理示意图; 图8示出了根据本发明实施例射击判定的原理图。 图中:2-瞄具本体;201-测距机;202-物镜组;203-物理按键组件;204-安装导轨; 205-电接口;206-视频输出接口;207-目镜组件;208-机械接口;209-扳机控制接口;210-电 池组件;4-扳机控制组件;401-控制杆;402-作动器;403-控制电路;5-扳机。











