
技术摘要:
本申请提供一种机械臂的控制方法及装置、电子设备、存储介质,该方法包括:获取机械臂每个关节在第一时刻的关节位置;根据每个关节在第一时刻的关节位置,确定每个关节的速度调整系数;根据机械臂末端在第一时刻的末端速度,关节速度和末端速度之间的变换关系以及每个 全部
背景技术:
在机器人领域,特别是协作机器人,七自由度机械臂有更高的灵活度,一个冗余自 由度在应用中使得机械臂避开关节限位和某些奇异位型而被广泛应用。 随着需求变化,更多特殊构型的七自由度机械臂生产应用,此时就需要一种通用 的七自由度机械臂逆运动学求解方法。逆运动学求解是指已知当前机器人各关节位置,计 算机器人末端目标点的笛卡尔空间位姿对应的各关节位置,从而控制机器人各关节的运 动。 一般来说,对于S-R-S构型(拟人手臂肩部1,2,3关节坐标系原点和腕部5,6,7关节 坐标系原点可分别交于一点)七自由度机械臂逆运动学可以通过几何分析确定臂型角,求 解代数方程组得到各关节位置。而非S-R-S构型机械臂由于几何上不存在臂型角,代数方程 组更无法解析求解,故目前没有通用的逆动力学求解方法计算出各关节的位置,从而无法 精确地控制各种构型机器臂的运动。
技术实现要素:
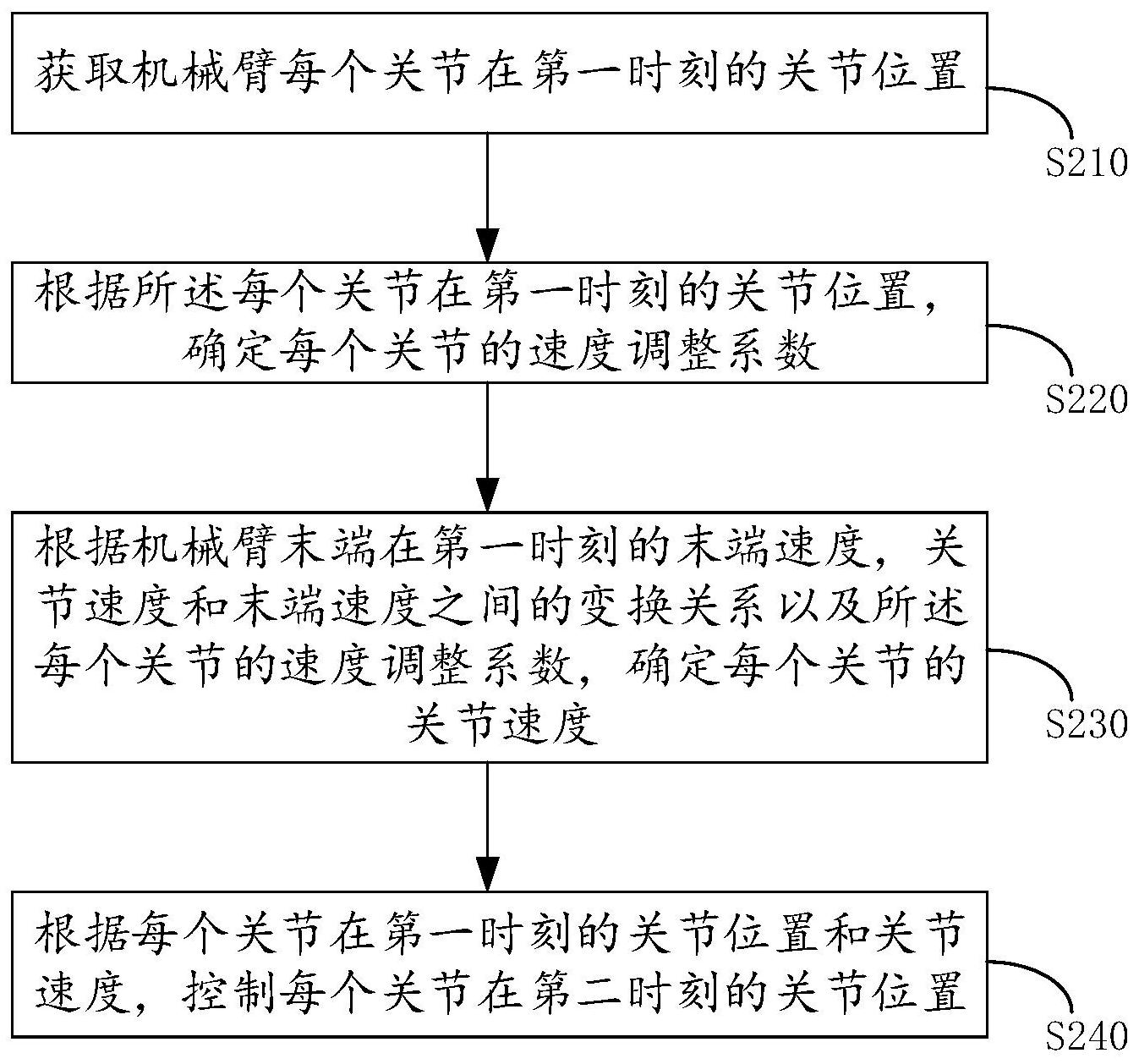
本申请实施例的目的在于提供一种机械臂的控制方法,可以精确控制非S-R-S构 型机械臂的运动。 本申请实施例提供了一种机械臂的控制方法,包括: 获取机械臂每个关节在第一时刻的关节位置; 根据所述每个关节在第一时刻的关节位置,确定每个关节的速度调整系数; 根据机械臂末端在第一时刻的末端速度,关节速度和末端速度之间的变换关系以 及所述每个关节的速度调整系数,确定每个关节的关节速度; 根据每个关节在第一时刻的关节位置和关节速度,控制每个关节在第二时刻的关 节位置。 在一实施例中,根据所述每个关节在第一时刻的关节位置,确定每个关节的速度 调整系数,包括: 针对每个关节,根据所述关节已知的实际位置极限和预设位置极限,将所述关节 的运动范围划分为多个区间; 根据所述关节在第一时刻的关节位置,确定所述关节所处的目标区间; 根据所述关节所处的目标区间,确定所述关节的速度调整系数。 在一实施例中,所述针对每个关节,根据所述关节已知的实际位置极限和预设位 置极限,将所述关节的运动范围划分为多个区间,包括: 针对每个关节,根据所述关节已知的实际位置极限、预设位置极限和奇异位置,将 4 CN 111590592 A 说 明 书 2/9 页 所述关节的运动范围划分为阻尼区间、正常区间和奇异区间。 在一实施例中,所述根据所述关节所处的目标区间,确定所述关节的速度调整系 数,包括: 若所述关节处于所述阻尼区间或奇异区间内,所述关节的速度调整系数小于1; 若所述关节处于所述正常区间内,所述关节的速度调整系数等于1。 在一实施例中,所述根据机械臂末端在第一时刻的末端速度,关节速度和末端速 度之间的变换关系以及所述每个关节的速度调整系数,计算每个关节的关节速度,包括: 根据每个关节在第一时刻的关节位置,计算用于表征所述变换关系的雅可比矩 阵; 根据所述雅可比矩阵、所述机械臂末端在第一时刻的末端速度以及每个关节的速 度调整系数,计算每个关节的关节速度。 在一实施例中,在根据每个关节在第一时刻的关节位置和关节速度,控制每个关 节在第二时刻的关节位置之前,所述方法还包括: 针对每个关节,根据所述关节在第一时刻的关节位置和实际位置极限,计算所述 关节对应的补偿速度; 在所述关节的关节速度上叠加所述补偿速度,得到更新后的关节速度。 在一实施例中,在根据每个关节在第一时刻的关节位置和关节速度,控制每个关 节在第二时刻的关节位置之前,所述方法还包括: 根据每个关节在第一时刻的关节位置,计算所述机械臂末端的位姿信息; 根据所述机械臂末端在所述第一时刻的实际位姿,计算所述位姿信息相对所述实 际位姿的相对误差; 根据所述相对误差,对每个关节的关节速度进行自适应调整。 本申请实施例还提供了一种机械臂的控制装置,包括: 位置获取模块,用于获取机械臂每个关节在第一时刻的关节位置; 系数确定模块,用于根据所述每个关节在第一时刻的关节位置,确定每个关节的 速度调整系数; 速度计算模块,用于根据机械臂末端在第一时刻的末端速度,关节速度和末端速 度之间的变换关系以及所述每个关节的速度调整系数,确定每个关节的关节速度; 位置控制模块,用于根据每个关节在第一时刻的关节位置和关节速度,控制每个 关节在第二时刻的关节位置。 本申请实施例还提供了一种电子设备,所述电子设备包括: 处理器; 用于存储处理器可执行指令的存储器; 其中,所述处理器被配置为执行上述机械臂的控制方法。 本申请实施例还提供了一种计算机可读存储介质,所述存储介质存储有计算机程 序,所述计算机程序可由处理器执行以完成上述机械臂的控制方法。 本申请上述实施例提供的技术方案,无需多次迭代即可计算出第二时刻的关节位 置,计算量小,计算速度快,可以及时做出响应。根据关节位置来控制关节的速度,从而可以 及时避开关节限位障碍,避免超过关节限位;根据第一时刻各关节的位置和速度直接计算 5 CN 111590592 A 说 明 书 3/9 页 出第二时刻各关节的位置,无需通过几何分析确定臂型角,再来计算各个关节的位置,故可 以适用于不存在臂型角的机械臂的运动控制。 附图说明 为了更清楚地说明本申请实施例的技术方案,下面将对本申请实施例中所需要使 用的附图作简单地介绍。 图1为本申请实施例提供的机械臂控制方法的应用场景示意图; 图2是本申请实施例提供的机械臂的控制方法的流程示意图; 图3是图2对应实施例中步骤S220的细节流程图; 图4是本申请实施例示出的速度调整系数和关节位置之间的曲线关系示意图; 图5是本申请另一实施例示出的速度调整系数和关节位置之间的曲线关系示意 图; 图6是本申请实施例示出的对每个关节的关节速度进行优化的步骤示意图; 图7是本申请实施例提供的每个关节在第二时刻的关节位置的计算流程示意图; 图8是本申请实施例提供的一种机械臂的控制装置的框架示意图。











