
技术摘要:
本发明属于自动化测量相关技术领域,其公开了一种基于标准球阵的零件特征机器人快速视觉定位方法,所述零件特征机器人快速视觉定位方法基于在位置1处扫描标准球阵及零件计算得到的零件特征在标准球阵局部坐标系下的坐标和通过扫描位置2处的标准球阵创建的局部坐标系, 全部
背景技术:
零件特征位姿的确定是零件定位安装和拆卸的重要前提,在以机器人为主要载体 的智能制造和装备领域,集成传感器、操作软件,以视觉定位代替传统人工肉眼识别定位, 进而分析计算得到零件特征在空间中的位姿,已成为目前智能制造及自动化测量领域的研 究方向之一。 零件的服役条件往往受到周边环境的约束,但零件服役在高温、高粉尘等极其恶 劣的环境中时,零件的安装拆卸变得十分困难。传统的零件安装和拆卸采用人工肉眼识别 定位法,这种方法依赖人工操作、效率低,随意性大、主观意识强、定位不准确,导致零件的 安装和拆卸不可靠,且容易发生安全事故。相应地,本领域存在着发展一种定位准确性较好 的基于标准球阵的零件特征机器人快速视觉定位方法的技术需求。
技术实现要素:
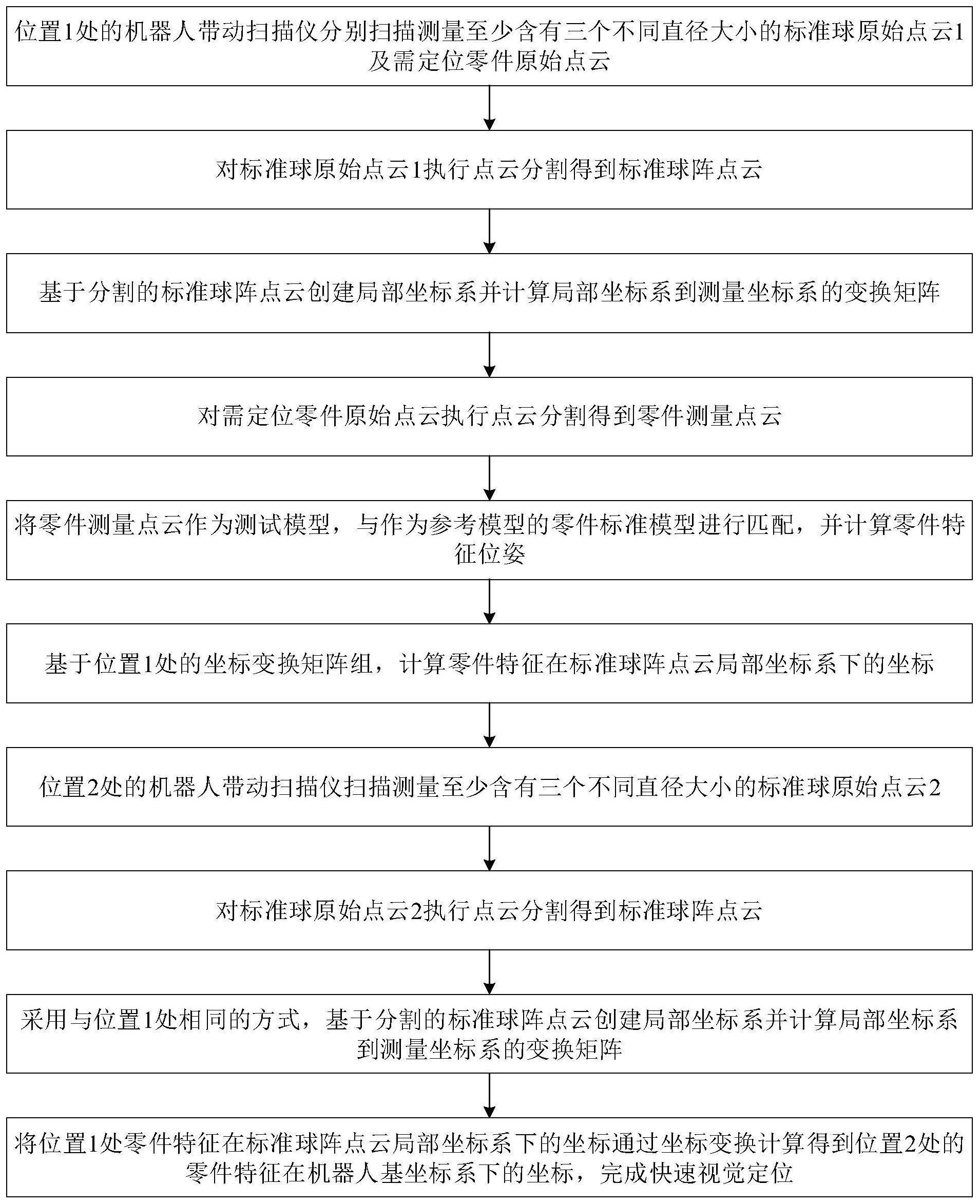
针对现有技术的以上缺陷或改进需求,本发明提供了一种基于标准球阵的零件特 征机器人快速视觉定位方法,所述方法采用非接触式测量技术,基于环境友好下的标准球 阵对零件特征进行快速定位。其中,非接触式测量具体为六自由度工业机器人带动光栅式 双目面阵扫描仪完成自动测量,标准球阵中的标准球均为标准哑光陶瓷球,基于在位置1处 扫描标准球阵及零件计算得到零件特征在标准球阵局部坐标系下的坐标和通过扫描位置2 处的标准球阵创建的局部坐标系,可以快速定位零件特征在空间中的坐标,并指导机器人 完成零件的安装和拆卸。同时,所述方法利用六自由度工业机器人带动光栅式双目面阵扫 描仪在环境友好的情况下对标准球阵及零件进行扫描测量的方式确定零件特征在标准球 阵局部坐标系的空间坐标,在环境恶劣的其他位置仅通过扫描标准球阵并以同样的方式创 建局部坐标系即可快速定位零件特征在空间中的位姿,且本发明可以对服役环境恶劣的零 件特征进行快速视觉定位,解决了人工肉眼识别定位零件特征存在的问题,具有实用性强, 定位精度高,适用范围广等优点。 为实现上述目的,本发明提供了一种基于标准球阵的零件特征机器人快速视觉定 位方法,所述方法包括以下步骤: (1)位于零件周围的位置1处的机器人带动扫描仪分别扫描测量至少含有三个不 同直径大小标准球的标准球原始点云1及需定位零件原始点云; (2)对标准球原始点云1执行点云分割以得到标准球阵点云; (3)基于分割得到的标准球阵点云构建局部坐标系并计算得到局部坐标系到测量 坐标系的变换矩阵; (4)对需定位零件原始点云执行点云分割以得到零件测量点云; 4 CN 111551111 A 说 明 书 2/6 页 (5)将所述零件测量点云作为测试模型,与作为参考模型的零件标准模型进行匹 配,并计算得到零件特征位姿; (6)基于得到的变换矩阵所组成的坐标变换矩阵组来计算零件特征在标准球阵点 云局部坐标系下的坐标; (7)位置2处的机器人带动扫描仪扫描测量至少含有三个不同直径大小标准球的 标准球原始点云2; (8)对标准球原始点云2执行点云分割以得到标准球阵点云2; (9)基于所述标准球点云2构建局部坐标系并计算该局部坐标系到对应的测量坐 标系的变换矩阵; (10)基于得到的变换矩阵将位置1处的零件特征在标准球阵点云局部坐标系下的 坐标通过坐标变换计算得到位置2处的零件特征在机器人基坐标系下的坐标,由此完成快 速视觉定位。 进一步地,至少含有三个不同直径大小标准球的标准球原始点云1与标准球原始 点云2的标准球阵模型是同一实体模型,且与需定位零件原始点云的实体模型在空间中的 相对位置保持不变。 进一步地,采用随机采样一致性及欧氏聚类的方式对标准球原始点云和零件原始 点云执行点云分割。 进一步地,步骤(3)和步骤(9)中,通过最小二乘拟合计算分割的标准球阵点云中 标准球的直径和球心坐标,并按照直径大小对标准球阵进行升序或降序排列,取排列最靠 前的三个标准球,分别编号为1、2、3,以1号标准球的球心为原点,分别计算该原点到2号标 准球和3号标准球的球心距矢量,以1号标准球到2号标准球的球心距矢量为X轴,1号标准球 到3号标准球的球心距矢量为Y轴,根据右手定则计算Z轴,再根据右手定则,基于X轴和Z轴 重新计算Y轴,最后采用标准化和Schmidt正交化对X、Y、Z轴向量进行处理,进而创建局部坐 标系,并结合1号标准球的球心在测量坐标系下的坐标计算局部坐标系到测量坐标系的变 换矩阵。 进一步地,步骤(5)采用ADF算法进行匹配,基于已创建好的零件标准模型中的位 姿信息,通过求解逆变换矩阵计算零件特征位姿。 进一步地,步骤(6)和步骤(10)均是在位置1和位置2处的标准球阵局部坐标系与 零件特征在空间中的相对位置保持不变的情况下,分别计算零件特征在标准球阵局部坐标 系和机器人基坐标系下的坐标。 进一步地,所述机器人为六自由度工业机器人,所述扫描仪为光栅式双目面阵扫 描仪。 进一步地,保持标准球阵实体模型与零件特征实体模型在空间中的相对位置不 变,将其从位置1移动到位置2;其次,在位置2处控制机器人带动扫描仪多姿态扫描测量标 准球阵,并记录每一位置相对应机器人的位姿,基于AX=XB理论模型计算手眼关系,即测量 坐标系到机器人末端坐标系的变换矩阵,记为 进一步地,步骤(6)中,首先,基于机器人1的位姿Pose1计算位置1处的机器人1测 量标准球阵时末端坐标系到基坐标系的变换矩阵,记为 5 CN 111551111 A 说 明 书 3/6 页 其次,基于机器人1的位姿Pose2计算位置1处的机器人1测量零件特征时末端坐标 系到基坐标系的变换矩阵,记为 最后,基于位置1处的坐标变换矩阵组,计算零件特征在标准球阵点云局部坐标系 下的坐标为 其中手眼矩阵 故 总体而言,通过本发明所构思的以上技术方案与现有技术相比,本发明提供的基 于标准球阵的零件特征机器人快速视觉定位方法主要具有以下有益效果: 1 .本发明利用六自由度工业机器人带动光栅式双目面阵扫描仪在环境友好处扫 描标准球阵及零件以确定零件与标准球阵之间的位置关系,然后在零件服役环境恶劣处仅 扫描标准球即可实现对零件特征的快速视觉定位。 2.本发明只需对标准球阵进行单幅扫描测量即可实现点云分割及标准球阵坐标 系的创建,不需要进行点云拼接,易于实施且测量效率高。 3.本发明基于包含三个不同直径大小标准球的标准球阵实现零件特征定位,创建 局部坐标系的方式简单灵活,且定位准确。 4.本发明采用ADF算法进行点云匹配,并基于匹配变换矩阵计算零件特征在测量 坐标系下的位姿,计算效率高且适用范围广。 附图说明 图1是本发明较佳实施方式提供的基于标准球阵的零件特征机器人快速视觉定位 方法的流程示意图; 图2是本发明实施例提供的基于标准球阵完成零件特征快速定位的系统某位置处 的示意图;其中,{B}为机器人基坐标系,{E}为机器人末端坐标系,{T}为测量坐标系,{W1} 为标准球阵局部坐标系,{W2}为零件局部坐标系; 图3是本发明提供的含有三个标准球的标准球阵三维特征示意图; 图4是本发明提供的需定位零件三维特征示意图; 图5是本发明实施例提供的基于标准球阵完成零件特征快速定位的系统位置1处 的示意图; 图6是本发明实施例提供的基于标准球阵完成零件特征快速定位的系统位置2处 的示意图。











