
技术摘要:
本发明是一种空间机械臂快速碰撞检测方法。所述方法为采用球体与胶囊体包围盒方法对实验舱机械臂和空间站本体构型进行球体和胶囊体包围盒的模型包络,并对包络模型进行数据采集和转换;当实验舱机械臂自身碰撞检测时,给定空间机械臂所需各相关参数,正运动学变换,得 全部
背景技术:
空间机械臂在人类的太空探索中发挥着越来越重要的角色。在复杂的空间环境 下,空间机械臂投入使用不仅可以有效地减小宇航员面临的风险,使其避免在极端温度以 及高辐射环境下执行外空间任务,而且提高了外太空任务执行的效率。空间站机械臂系统 由核心舱机械臂和实验舱机械臂构成。其中实验舱机械臂主要完成空间站维护维修、辅助 运营管理和支持EVA等任务。 在遥操作领域下,空间机械臂快速碰撞检测对于保证空间站和机械臂正常有序工 作起到了十分关键的作用。为了保证空间站以及实验舱机械臂工作安全,根据中央控制器 的碰撞检测模块,实现防止实验舱机械臂运动过程中与空间站本体、核心舱机械臂等发生 碰撞的目标。 本文将针对根据空间站机械臂任务仿真对于碰撞检测的具体需求,研究最适合的 碰撞检测方法,实现空间站机械臂任务仿真中的碰撞检测。其中,包围盒碰撞检测是应用最 广泛的碰撞检测算法,它通过检测物体周围的边界框是否重叠来判断两者是否碰撞,具有 快速的优点。因为如果被检测的两个物体的边界框不重叠,那么这两个物体也必没有碰撞。 因此,包围盒碰撞检测可以用作空间站机械臂快速碰撞检测方法的检测对象。 目前针对空间机械臂的快速碰撞方法有球体、K-DOP、OBB以及AABB等方法。AABB包 围盒紧密性差,无法旋转。OBB包围盒,尽管能对物体紧密包围,但增加了相交测试的时间, 与快速碰撞要求不符。K-DOP需要进行额外计算以确定如何选取包夹平面。因此采用相对简 单且旋转时不需更新的球体包围盒作为空间机械臂的快速碰撞的基础方法。但针对空间机 械臂嵌入式系统的在轨有限资源约束与实时性要求,单纯采用球体包围盒对机械臂和空间 站本体进行碰撞检测不能满足要求。
技术实现要素:
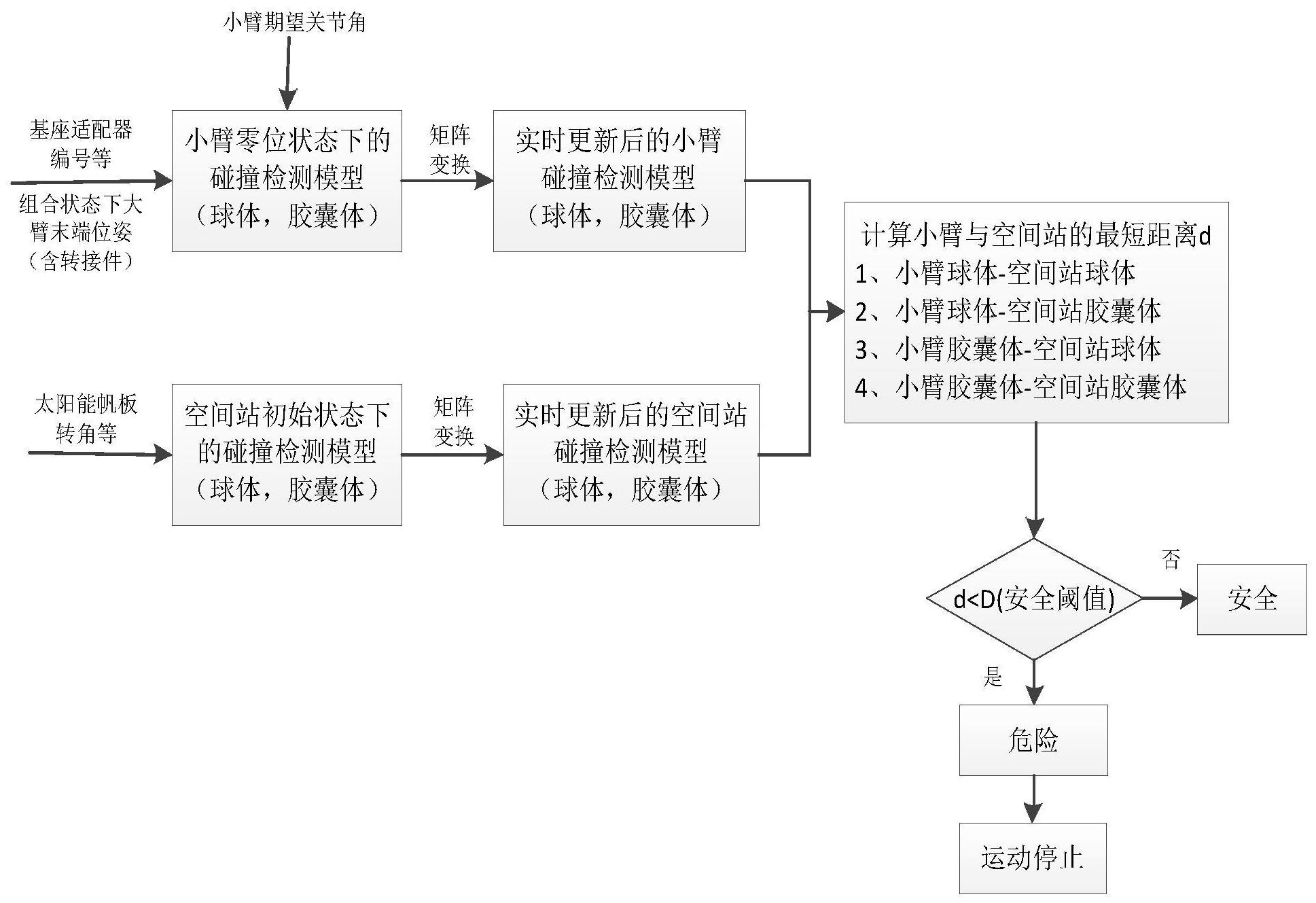
本发明为解决单纯采用球体包围盒对机械臂和空间站本体进行碰撞检测不能满 足要求的问题,本发明提供了一种空间机械臂快速碰撞检测方法,本发明提供了以下技术 方案: 一种空间机械臂快速碰撞检测方法,包括以下步骤: 步骤1:采用球体与胶囊体包围盒方法对实验舱机械臂和空间站本体构型进行球 体和胶囊体包围盒的模型包络,并对包络模型进行数据采集和转换; 步骤2:当实验舱机械臂自身碰撞检测时,给定空间机械臂所需各相关参数,正运 动学变换,得到空间机械臂新的位姿; 步骤3:当实验舱机械臂与空间站本体碰撞检测时,预先设定碰撞部件检测; 步骤4:当实验舱机械臂与核心舱机械臂串联与空间站本体碰撞检测时,由于双臂 4 CN 111546378 A 说 明 书 2/7 页 串联,进行全部部件检测。 优选地,所述步骤1具体为: 采用球体与胶囊体包围盒方法对实验舱机械臂和空间站本体构型进行球体与胶 囊体包围盒的模型包络,将所述机械臂的各部件进行包络后采集每个球体的球心坐标和半 径大小,并转换在同一坐标系下,确定实验舱机械臂和核心舱机械臂关节角度,根据实验舱 机械臂和核心舱机械臂关节角度判断空间站太阳翼帆板是否转动。 优选地,其特征是:在空间站运行过程中,对碰撞检测模型进行更新,主要包括以 下类型: 当空间站构型发生改变时,将描述空间站碰撞检测模型的数据存储在数据存储区 域,调用C语言程序代码;地面机器人获得不同空间站构型下的模型数据;若构型发生改变, 地面机器人重新生成空间站碰撞检测模型,通过地面上注方式,更新区域数据; 当暴露平台的构型发生改变时,将描述暴露平台碰撞检测模型的数据存储在数据 存储区域,调用C语言程序代码,当构型发生改变,给出暴露平台相对之前位置的变换,又已 知暴露平台相对空间站坐标系的变换,计算得出新位置的模型数据,地面机器人重新生成 暴露平台碰撞检测模型,通过地面上注方式,更新区域数据,通过下式表示碰撞模型数据: T0=T1×T2 其中,T0为碰撞后暴露平台相对空间站坐标系的变换,T1为暴露平台相对空间站坐 标系的变换,T2为暴露平台碰撞前坐标系的变换; 当末端载荷尺寸发生改变时,将描述末端载荷碰撞检测模型的数据存储在数据存 储区域,调用C语言程序代码;当末端载荷尺寸发生改变时,确定末端载荷在小臂运动学坐 标系下的坐标以及尺寸的变化,计算更新得出末端模型数据,地面机器人生成末端载荷碰 撞检测模型,通过地面上注方式,更新区域数据; 当空间站上增加大型舱体或载荷时将预留的描述新增碰撞检测模型的数据存储 在数据存储区域,判断是否添加新模型以及添加的模型数量,地面机器人生成新增碰撞检 测模型,通过地面上注方式,更新区域数据,在模型数据转换过程以及碰撞测试过程时进行 判断。 优选地,所述步骤2具体为: 当实验舱机械臂自身碰撞检测时,给定空间机械臂所需各相关参数,正运动学变 换,得到空间机械臂新的位姿; 根据空间机械臂任务的需要,给定空间机械臂各杆件长度、各关节关节角度、末端 负载状态、基座适配器编号和肩部适配器编号信息,为空间机械臂实现快速自碰撞检测做 准备,根据空间机械臂各关节角度进行正运动学变换,得到实验舱机械臂新的位姿,并以球 体和胶囊体的模型数据更新,检测到碰撞后根据球体和胶囊体包络算法计算实验舱机械臂 自身部件之间的最短距离,以及距离最短的部件编号。 优选地,当实验舱机械臂与空间站本体碰撞检测时,预先设定碰撞部件检测,基座 位置在舱体上,由于基座固定,预先设置不同基座处与实验舱机械臂发生碰撞检测的舱体 和太阳翼,当在轨任务时,对发生碰撞的太空舱进行检测,检测到碰撞后根据包络形式选择 算法,计算实验舱机械臂与除实验舱机械臂外分系统之间的最短距离,以及返回距离最短 的分系统编号。 5 CN 111546378 A 说 明 书 3/7 页 本发明具有以下有益效果: 本发明在球体包围盒碰撞检测的基础上进行了改进,提出了基于球体与胶囊体包 围盒结合的空间机械臂快速碰撞检测方法,该方法能够保证在有限资源下针对空间机械臂 嵌入式系统能够实时有效碰撞检测,并且极大地缩短检测时间。实际在对空间机械臂操作 时,根据不同的任务需求采取不同的碰撞策略,当实验舱机械臂自身碰撞检测时,进行正运 动学变换,得到空间机械臂新的位姿;当实验舱机械臂单独运动时,预先设定可能碰撞部件 进行检测,节省不必要的时间;当实验舱机械臂与核心舱机械臂串联时,需全部检测。本发 明能够满足实时性30ms的要求,是对球体包围盒的快速碰撞检测算法的改进。 附图说明 图1为空间机械臂快速碰撞检测方法流程图; 图2为实验舱机械臂球与胶囊包络图; 图3为空间站本体球与胶囊包络图; 图4为点到点最近位置示意图; 图5为点到线段最近位置示意图,图5-(a)为靠近端点A且位于AB外部,图5-(b)为 位于AB内部,图5-(c)为靠近端点B且位于AB外部; 图6为两线段最近位置示意图,图6-(a)为两线段内部,图6-(b)为线段内部一点, 图6-(c)为线段另一线段的端点,图6-(d)为两线段端点。











