
技术摘要:
一种致动器控制布置,包括:具有外壳和能够在外壳内轴向地移动的活塞杆的液压致动器;布置在压力源与致动器之间而能够在第一模式与第二模式之间切换的电磁阀;设置在压力源与致动器之间而在第一位置与第二防伸出位置之间移动的防伸出阀;防伸出阀具有第一压力输入端和 全部
背景技术:
液压致动器有许多应用,特别在控制可移动部件的移动方面。在飞行器中,借助于 液压致动器来移动许多可移动部件和表面。 一般来说,液压致动器包括圆柱形外壳,轴向可移动的活塞杆被安装在圆柱形外 壳中。在外壳内的杆的头部将外壳划分成两个腔室,每个腔室具有流体端口,经由流体端 口,加压流体能够注入到腔室中或低压流体离开腔室,以致改变在活塞头部任一侧的两个 腔室内的相对压力,从而导致活塞相对于外壳移动。伸出外壳的活塞杆的自由端附接到要 移动的部件或表面。液压流体将经由外壳中的端口从与致动器外壳的内部流体连通的液压 流体供应器提供到致动器,以导致活塞杆伸出外壳,或从外壳抽取液压流体以导致活塞杆 缩回到外壳中。活塞杆的移动由施加到致动器的流体的方向或和压力确定,所述移动响应 于控制信号。 当活塞杆相对于外壳移动时,活塞杆附接到的可移动部件或表面将相应地移动。 为了允许杆的伸出和杆的缩回两者,设置阀以将移动设定成伸出或缩回。这个阀 可以是伺服阀,更确定地,电液伺服阀(electrohydraulic servovalve;EHSV)。所述阀定位 在液压流体供应器与致动器之间,并且响应于电控制信号能够在第一位置与第二位置之间 移动,在所述第一位置中,高压流体从供应器流到致动器外壳的一个腔室中并且低压流体 离开另一个腔室,在所述第二位置中,高压流体被注入到另一个腔室中并且从致动器外壳 的第一腔室抽取。所述阀也可以具有中立或闭合位置,在所述中立或闭合位置中,即不供应 流体到致动器外壳,也不从致动器外壳抽取流体。 由EHSV控制的液压致动器的一个特别应用是控制飞行器的机翼上的扰流板的移 动。扰流板是在机翼襟翼后面安装在飞行器机翼上的可移动表面。当飞行器在巡航中时,机 翼襟翼和扰流板均沿着机翼躺平。为了降低飞行器速度,相对于机翼向上升高扰流板。 扰流板移动是通过液压致动器如上所述地伸出导致。 如果在伸出扰流板时失去电力,则扰流板会施加过度拖曳。系统因此知道在失去 电力的情况下将扰流板缩回到其在外壳中的“零”位置。这作通常借助于将EHSV偏置到一阀 位置,在所述阀位置中,高压流体被提供到活塞头的活塞杆侧上的腔室,使得活塞头的所述 侧上的压力大于另一腔室中的压力,从而导致活塞缩回到外壳中。这种情况将在下文加以 进一步描述。 常规地,在外壳内的机械止挡件使活塞杆停止在零位置。 如果失去液压动力,则也会出现扰流板控制上的问题。在这里,防止致动器伸出的 解决方法是介于EHSV与致动器之间的防伸出阀,当液压动力降到预定压力(通常是给定“失 速”压力的1.2倍)以下时,所述防伸出阀切换到压力释放位置。再一次,这种情况将在下文 3 CN 111550469 A 说 明 书 2/5 页 加以进一步描述。如果扰流板伸出,并且失去压力,则扰流板将由于气动负载而缩回,且将 逐渐下降以变得与机翼表面对齐,直到达到零铰链位置。重要的是将扰流板保持在这个位 置并且防止杂散延伸。 大部分飞行器具有使用致动器杆的正行程操作的扰流板-即使杆伸出以提升扰流 板。致动器的行程介于外壳中的“零”位置与伸出位置之间,并且控制系统被偏置以使杆返 回到零位置。 最近,一些飞行器已使用活塞杆的负行程在扰流板中并入“下垂”功能-即在外壳 中回到比零位置更远的位置,换句话说,从反方向上的零位置移动到在用于使杆伸出的正 行程中移动的方向的行程。 下垂功能用于例如为了升高操纵而相对于机翼降低扰流板,或在机翼襟翼伸出的 情况下闭合机翼襟翼与扰流板之间的巨大气隙。 问题出现在扰流板与机翼襟翼运动范围的重叠区域中。如果例如失去驱动扰流板 的电流,则当不被致动器驱动时,扰流板在其自身重量下或在来自EHSV偏置的压力下将压 在机翼襟翼上,从而干扰机翼襟翼的移动。 当扰流板处在非重叠区域中时,系统将具有比失速负载高的抗伸展,例如1.2倍的 失速负载Fstall。这意味在作用于与弹簧相反的侧的压力小于1.2倍Fstall(或其他设定的 防伸出力)时,防伸出机构起作用。然而,在重叠区域中,这个力会过大并且对机翼襟翼造成 伤害。因此希望襟翼能够以减小的防伸出阈值驱动扰流板以避免对机翼襟翼造成伤害-即 以较小力触发防伸出机构。 然而,本发明已发现提供防止扰流板和襟翼彼此干扰的阀总成的需要。
技术实现要素:
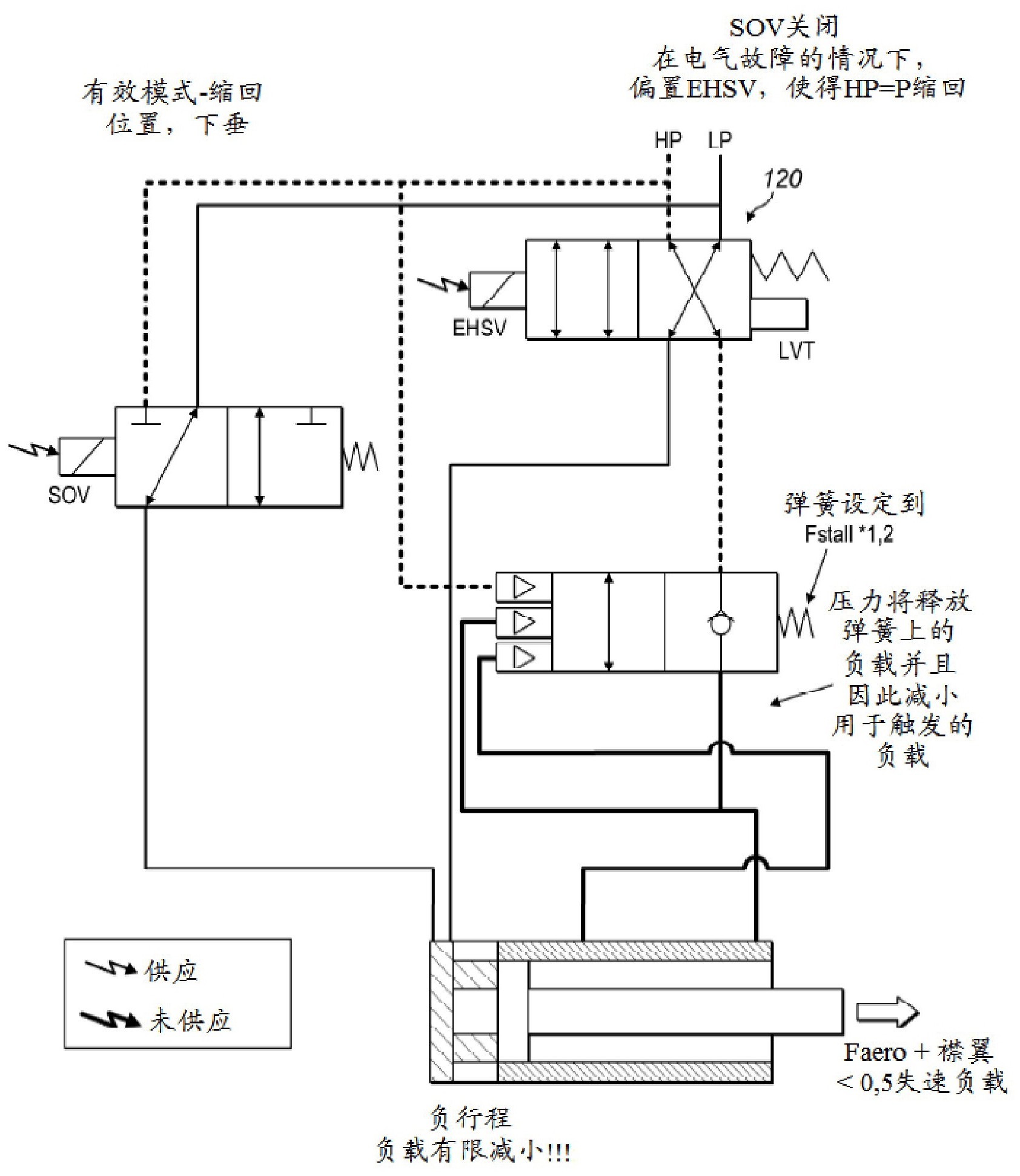
本公开提供一种致动器控制布置,所述致动器控制布置包括:液压致动器,所述液 压制动器具有外壳和活塞杆,所述活塞杆能够响应于对所述活塞杆施加压力而在所述外壳 内在相对于所述外壳的中立位置、缩回位置和伸出位置之间轴向地移动;电磁阀,所述电磁 阀布置在压力源与所述致动器之间,所述电磁阀能够响应于电控制信号而在第一模式与第 二模式之间切换,其中,在所述第一模式中,所述电磁阀形成从所述压力源到所述致动器的 液体流动路径,并且在所述第二模式中,所述电磁阀形成用于从所述致动器释放压力的液 体流动路径;以及防伸出阀,所述防伸出阀设置在所述压力源与所述致动器之间,被配置成 在第一位置与第二防伸出位置之间移动,在所述第一位置中,流体路径在所述压力源与所 述致动器之间形成,所述第二防伸出位置用于防止所述活塞杆在失去压力的情况下相对于 所述外壳延伸;其中所述防伸出阀具有被布置成从所述压力源接收压力的第一压力输入端 和被布置成从所述致动器接收压力的第二压力输入端,所述第一输入端处和所述第二输入 端处的所述压力的总和对抗弹簧,所述弹簧使所述防伸出阀偏置到所述第二位置中;并且 还包括在所述致动器外壳中的出口端口,所述出口端口被布置成在所述电磁阀处于所述第 一位置时闭合且在所述电磁阀处于所述第二位置时打开,并且在打开时将压力从所述致动 器传递到所述防伸出阀的第三输入端,以增加对抗所述弹簧的所述压力。 因此,在所述活塞杆处在负行程中的情况下和在压力故障的情况下,解除防伸出 功能需要较少的力,这是因为力在施加到所述防伸出阀的对抗所述弹簧偏置的末端时加 4 CN 111550469 A 说 明 书 3/5 页 倍。 所述致动器优选地也包括介于所述压力源与所述致动器之间的电液伺服阀EHSV, 所述EHSV用于响应于所述电控制信号而控制将加压流体引导到所述致动器。优选地,所述 EHSV能够在第一位置与第二位置之间移动,在所述第一位置中,高压流体从流体源被引导 到所述致动器的第一腔室,以导致所述活塞杆伸出,借助于所述第二位置,高压流体被引导 到所述致动器的第二腔室,以导致所述活塞杆相对于所述外壳缩回。 所述EHSV的缺省位置优选地是所述第二位置。 在用于飞行器的扰流板控制布置中优选地使用所述致动器布置,所述扰流板控制 布置包括:扰流板,所述扰流板能够相对于机翼表面移动;以及如上所述的致动器控制布 置,所致动器被布置成通过活塞杆的移动来移动所述扰流板。 附图说明 现在将仅用举例方式并且参考图式描述优选实施方案。 图1是常规致动器控制阀布置的示意图。 图2是在第一状态(非重叠区域)下的根据本公开的致动器控制阀布置的示意图。 图3是在第二状态(重叠区域)下的根据本公开的致动器控制阀布置的示意图。











