
技术摘要:
本发明提出一种四旋翼无人机的网络控制方法、计算机设备及存储介质,所述方法包括:步骤1、四旋翼无人机借助地面中转端实现与用户计算机无线通信;步骤2、四旋翼无人机利用自身携带的图像采集设备进行场景拍摄,从而获取图像信息,同时,四旋翼无人机利用自身携带的传 全部
背景技术:
随着无人机及其相关技术的不断发展,越来越多的无人机正在被使用。四旋翼无 人机凭借其小巧灵活、对起飞场地要求低的特点被广泛应用在生活的各个方面。目前针对 传统的四旋翼无人机控制方法,主要有以下几个局限:(1)受到控制信号覆盖范围的要求, 无人机只能在有限距离内进行飞行,无法进行较大覆盖范围的飞行;(2)遥控无人机的飞行 需要现场操作人员的控制,对操作人员的知识水平有着一定的要求;(3)无人机自主飞行技 术仍然存在众多不足,无法满足航拍精度与飞行质量的要求;(4)仅依靠定位系统的无人机 降落存在不可消除的误差,甚至导致降落事故。
技术实现要素:
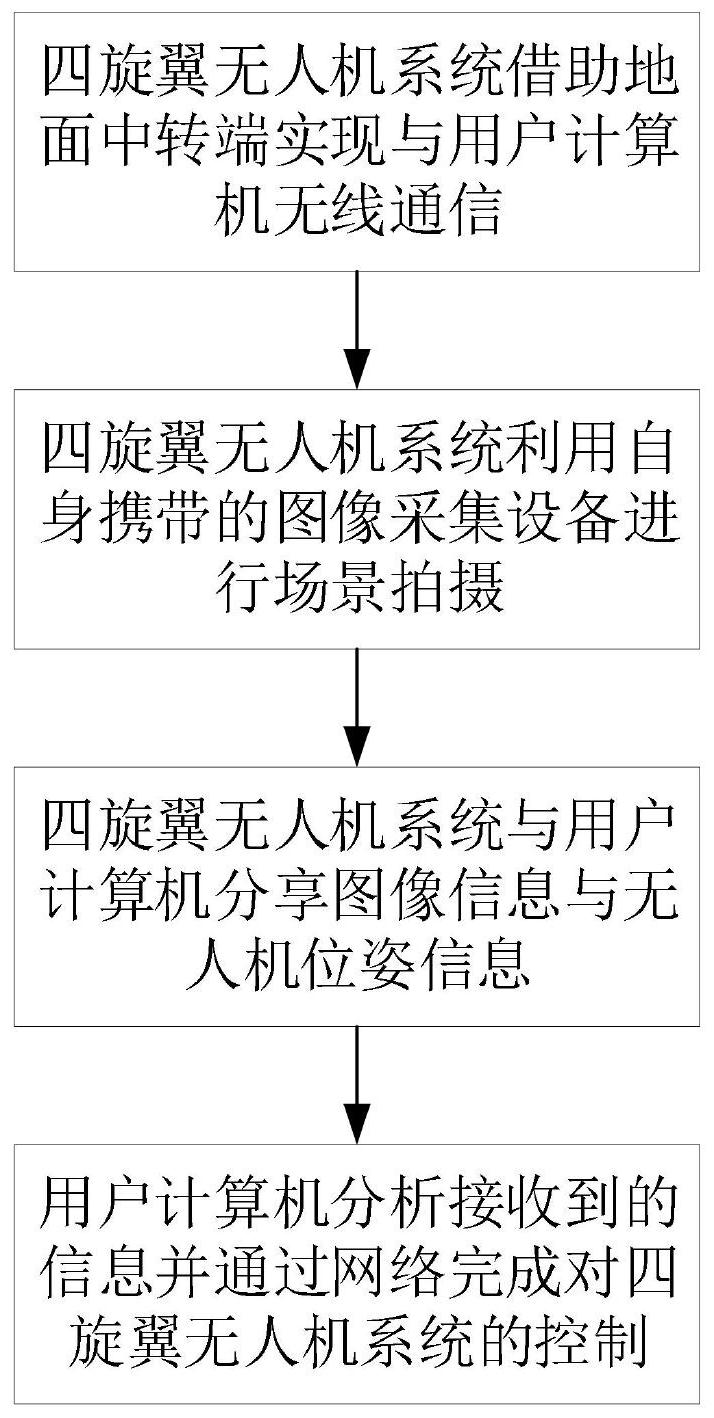
本发明目的是为了解决现有技术中的问题,提出了一种四旋翼无人机的网络控制 方法、计算机设备及存储介质。 本发明是通过以下技术方案实现的,本发明提出一种四旋翼无人机的网络控制方 法,所述方法包括以下步骤: 步骤1、四旋翼无人机借助地面中转端实现与用户计算机无线通信; 步骤2、四旋翼无人机利用自身携带的图像采集设备进行场景拍摄,从而获取图像 信息,同时,四旋翼无人机利用自身携带的传感器获取无人机位姿信息; 步骤3、四旋翼无人机与用户计算机分享图像信息和无人机位姿信息; 步骤4、用户计算机处理分析接收到的信息并通过网络完成对四旋翼无人机的控 制; 在步骤4中,所述对四旋翼无人机的控制包括四旋翼无人机位置控制、四旋翼无人 机速度控制、四旋翼无人机自主降落和四旋翼无人机视觉定位; 所述四旋翼无人机视觉定位采用单目视觉定位方法,包括以下步骤: a.获取不同视角的地面图像; b.采用FAST角点特征作为特征点进行特征提取; c.加入特征的方向信息; d.采用BRIEF描述子进行特征描述; e.进行特征跟踪,获取无人机的当前位姿信息; f .插入关键帧图像信息,通过三角化计算得到新的地图云点完成局部地图的构 建; g.计算当前关键帧和回环关键帧之间的相似变换得到回环的累计误差,以此对回 环进行校正; 4 CN 111610799 A 说 明 书 2/4 页 h.根据地图的校正,对地图的云点进行相应的调整,完成ORB_SLAM单目视觉定位 方法。 进一步地,在步骤1中,地面中转端使用无线局域WLAN通信连接四旋翼无人机与连 入覆盖飞行区域通信网络的用户计算机;所述地面中转端获取所述四旋翼无人机标识与所 述用户计算机标识的绑定关系。 进一步地,所述用户计算机具有图像处理功能,通过接收到的四旋翼无人机采集 到的图像信息进行场景重建;所述用户计算机通过所述四旋翼无人机分享的无人机位姿信 息完成对所述四旋翼无人机的定位;所述用户计算机根据人机操作界面实现对所述四旋翼 无人机的飞行控制。 进一步地,所述图像采集设备包括负责图像采集的相机和负责稳定相机姿态的云 台。 进一步地,所述无人机位姿信息包括GPS定位信息、无人机位置信息、无人机姿态 信息、无人机飞行速度信息以及无人机飞行路径信息。 进一步地,所述用户计算机处理分析接收到的信息包括相机标定步骤和目标定位 步骤;根据图像采集设备采集到的图像信息完成相机标定;根据图像采集设备采集到的图 像信息和传感器获取的无人机位姿信息完成目标定位。 进一步地,所述四旋翼无人机包括存储器组件、电源组件、图像采集设备、无线入 网组件、传感器以及四旋翼无人机嵌入式核心;所述存储器组件、电源组件、图像采集设备、 无线入网组件和传感器均与所述四旋翼无人机嵌入式核心互通信连接。 本发明还提出一种计算机设备,包括存储器、处理器及存储在存储器上并可在处 理器上运行的计算机程序,所述处理器执行所述计算机程序时实现上述方法。 本发明还提出一种计算机可读存储介质,所述计算机可读存储介质存储有执行上 述方法的计算机程序。 本发明的有益效果为: 1、本发明增加了四旋翼无人机的受控范围,操作人员可以通过用户计算机在网络 覆盖的范围内对四旋翼无人机进行操控,在无人机电量允许条件下增加无人机探索空间。 2、本发明采用图像识别与GPS定位结合的方式,提高四旋翼无人机定位的准确性, 可以精准实现无人机的自主降落。 3、本发明中四旋翼无人机与用户计算机共享图像信息与传感器信息,用户可以远 程实时监测无人机飞行信息,了解飞行状态与环境。 附图说明 图1为本发明所述四旋翼无人机的网络控制方法的流程图; 图2为本发明中四旋翼无人机硬件图; 图3为本发明中四旋翼无人机控制框图。











