
技术摘要:
本发明涉及一种工业机器人,特别涉及一种七轴工业机器人。包括依次转动连接的底座、腰座、第一大臂、第二大臂、肘部、小臂、腕关部及末端法兰,其中腰座和底座可绕第一轴线相对旋转,第一大臂的一端与腰座连接,另一端与第二大臂的一端连接,第二大臂的另一端与肘部连 全部
背景技术:
七轴喷涂机器人,又称为冗余机器人,相比六轴喷涂机器人额外的轴允许机器人 躲避某些特定的目标,便于末端执行器到达特定的位置,可以更加灵活的适应某些特殊工 作环境,七轴运动系统实现更大移动性,喷漆机器人通常配备六个轴。喷漆室墙壁中的行走 轨道确保机器人可在喷漆房中与车身平行移动,从而到达所有车身区域。尤其在内部涂装 中,这可改进许多区域的可达性并避免与车辆碰撞。由于采用全新优化的控制系统,七轴喷 涂机机器人以一致、甚至更加协调的涂装路径沿着车身移动。对于喷漆房中的效率提升:七 轴机器人省掉了行走轨道,对比六轴机器人用于内喷涂应用,第七轴使机器人能够更好地 到达许多位置,尤其对于内部涂装。但是现有的七轴喷涂机器人还存在构型只适合侧探深 喷涂,不能上下抠探深打磨和喷涂的问题,存在局限性。
技术实现要素:
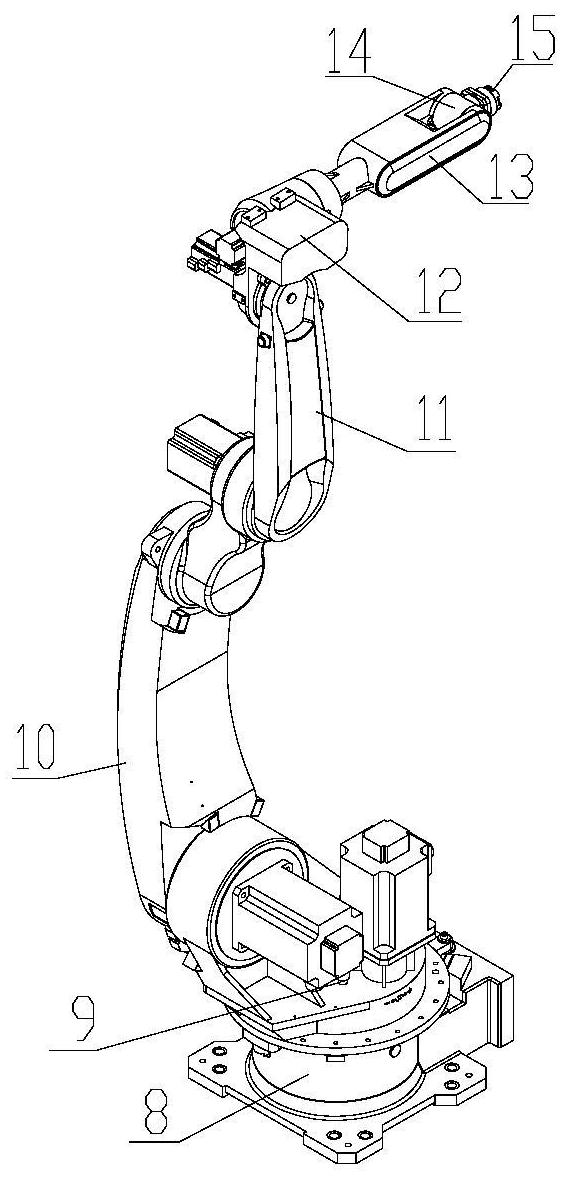
针对上述问题,本发明的目的在于提供一种七轴工业机器人,以解决打磨、卫浴和 喷涂行业的复杂构件的内凹表面打磨或者喷涂,运动学干涉避障问题。 为了实现上述目的,本发明采用以下技术方案: 一种七轴工业机器人,包括依次转动连接的底座、腰座、第一大臂、第二大臂、肘 部、小臂、腕关部及末端法兰,其中腰座和底座可绕第一轴线相对旋转,所述第一大臂的一 端与腰座连接,另一端与第二大臂的一端连接,所述第二大臂的另一端与肘部连接,所述第 一大臂和腰座可绕第二轴线相对旋转,所述第一大臂和第二大臂可绕第三轴线相对旋转, 所述第二大臂和肘部可绕第四轴线相对旋转,所述第二轴线、第三轴线及第四轴线相互平 行。 所述第一轴线和第二轴线为垂直正交。 所述小臂和肘部可绕第五轴线相对旋转,所述第五轴线与第四轴线为垂直正交。 所述腕关部和小臂可绕第六轴线相对旋转,所述第六轴线6与第五轴线垂直正交。 所述末端法兰和腕关部可绕第七轴线相对旋转,所述第七轴线与所述第六轴线垂 直正交。 本发明的优点及有益效果是: 1 .本发明对打磨、卫浴和喷涂行业的复杂构件的内凹表面进行打磨或者喷涂,运 动学干涉避障能力提高,即提高运动冗余。 2.本发明对打磨、卫浴和喷涂行业的复杂构件的内凹表面进行打磨或者喷涂,不 需要外部直线运动滑台,防爆策略简单。 3.本发明对打磨、卫浴和喷涂行业的复杂构件的内凹表面打磨或者喷涂,不需要 3 CN 111571565 A 说 明 书 2/3 页 外部直线运动滑台,装配周期短,见效快。 4.本发明灵活度高,控制难度低,适用范围广。 5.本发明对于下冗余控制情况,奇异解较少。 附图说明 图1为本发明的轴测图; 图2为本发明的主视图‘ 图3为图2的左视图; 图4为图2的俯视图; 图5为本发明的爆炸图。 图中:1为第一轴线,2为第二轴线,3为第三轴线,4为第四轴线,5为第五轴线,6为 第六轴线,7为第七轴线,8为底座,9为腰座,10为第一大臂,11为第二大臂,12为肘部,13为 小臂,14为腕关部,15为末端法兰。











