
技术摘要:
本发明提供了一种物体三维重建方法和系统,处理器接收原始三维点云数据,根据第一点云数据和预设感兴趣区域数据确定第一点云数据对应的第一点云点是否在预设感兴趣区域数据对应的感兴趣区域内;当第一点云点在感兴趣区域内时,将第一点云数据保存在物体三维点云数据中 全部
背景技术:
近年来现随着计算机科技的发展和数据处理等领域的快速发展,从图像数据进行 目标(例如,关注的对象)的3D建模是热门的计算机视觉主题。重建三维模型是计算机动画、 医学成像、计算机图形学等众多领域中的一个重要过程。 采用根据摄像机在不同位置拍摄的一系列图像进行了重建。这种方法的一个明显 缺点是感兴趣的对象必须是静态的。这种系统不适于在动态物体上工作,并且需要诸如转 盘转速的先验知识。另一种方法是采用在多个摄像机的支持下执行从轮廓中提取形状的方 法,以检索物体的视觉外壳,但这种方法在重建模型中缺少凹面区域。还有的方案采用一个 多彩色照相机和深度传感器的系统,这种方法的主要缺点是需要同步协议在移动物体上工 作时,有时每个照相机和传感器必须连接到唯一的计算机,其能够获得的良好精度,但是设 备成本高昂,且在处理过程中产生不必要的资源冗余。此外,使用多个深度相机可能会导致 严重的红外干扰。
技术实现要素:
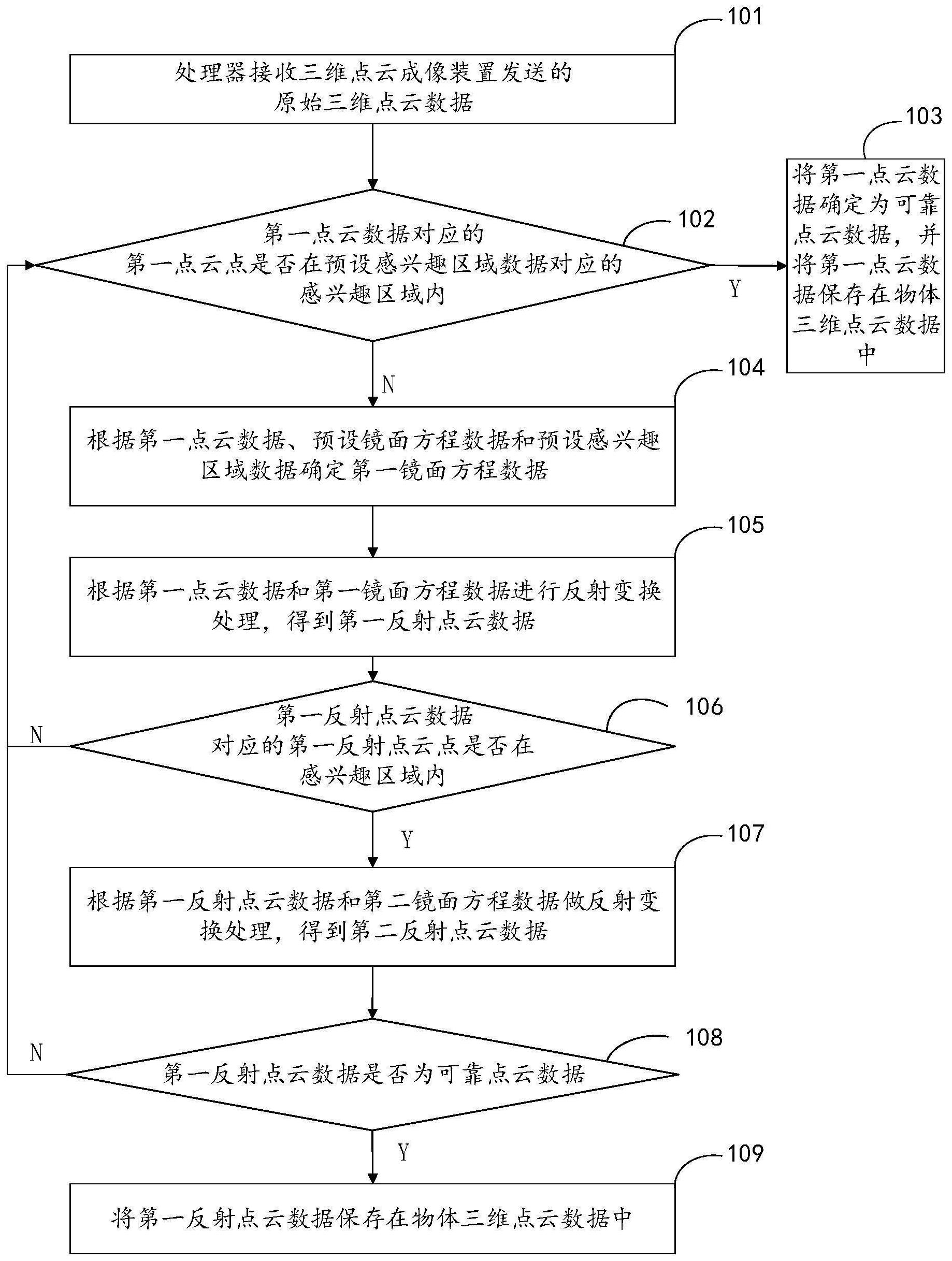
针对现有技术缺陷,本发明实施例的目的是提供一种物体三维重建方法和系统, 用于通过拍摄一帧物体所在目标场景的图像,通过分析计算处理就能重建物体的三维对象 模型。 为解决上述问题,第一方面,本发明提供了一种物体三维重建方法,所述方法包 括: 处理器接收三维点云成像装置发送的原始三维点云数据;其中,所述原始三维点 云数据包括多个第一点云数据; 根据所述第一点云数据和预设感兴趣区域数据进行位置判断处理,确定所述第一 点云数据对应的第一点云点是否在所述预设感兴趣区域数据对应的感兴趣区域内; 当所述第一点云点在所述感兴趣区域内时,将所述第一点云数据确定为可靠点云 数据,并将所述第一点云数据保存在物体三维点云数据中; 当所述第一点云点不在所述感兴趣区域内时,根据所述第一点云数据、预设镜面 方程数据和所述预设感兴趣区域数据确定第一镜面方程数据; 根据第一点云数据和第一镜面方程数据进行反射变换处理,得到第一反射点云数 据; 根据所述第一反射点云数据和所述预设感兴趣区域数据进行位置判断处理,确定 所述第一反射点云数据对应的第一反射点云点是否在所述感兴趣区域内; 当所述第一反射点云点在所述感兴趣区域内时,根据第一反射点云数据和第二镜 面方程数据进行反射变换处理,得到第二反射点云数据; 5 CN 111583392 A 说 明 书 2/8 页 根据所述第一点云数据、所述第二反射点云数据和预设相机中心位置数据确定所 述第一反射点云数据是否为可靠点云数据; 当所述第一反射点云数据为可靠点云数据时,将所述第一反射点云数据保存在所 述物体三维点云数据中。 优选的,所述根据所述第一点云数据和预设感兴趣区域数据进行位置判断处理, 确定所述第一点云数据对应的第一点云点是否在所述预设感兴趣区域数据对应的感兴趣 区域内具体为: 根据所述第一点云数据和所述预设感兴趣区域数据,确定所述第一点云点在所述 预设感兴趣区域数据对应的感兴趣平面的投影点的坐标值; 采用射线法确定所述投影点是否在所述预设感兴趣区域数据对应的感兴趣区域 内; 当所述投影点在所述感兴趣区域内时,确定所述第一点云点处于所述感兴趣区域 内;当所述投影点不在所述感兴趣区域内时,确定所述第一点云点不在所述感兴趣区域内。 优选的,其特征在于,所述预设镜面方程数据包括两组镜面方程数据,所述根据所 述第一点云数据、预设镜面方程数据和所述预设感兴趣区域数据确定第一镜面方程数据具 体为: 确定所述预设镜面方程数据中的一组镜面方程数据为判定镜面方程数据; 根据所述第一点云数据和所述判定镜面方程数据进行反射变换处理,得到反射点 云数据; 根据所述反射点云数据和所述预设感兴趣区域数据进行位置判断处理,确定所述 反射点云数据对应的反射点云点是否在所述感兴趣区域内; 当所述反射点云点在所述感兴趣区域内时,确定所述判定镜面方程数据为第一镜 面方程数据,否则确定预设镜面方程数据中的另一组镜面方程数据为第一镜面方程数据。 优选的,所述根据所述第一点云数据、所述第二反射点云数据和预设相机中心位 置数据确定所述第一反射点云数据是否为可靠点云数据具体为: 根据所述第一点云数据和预设相机中心位置数据进行距离计算处理,得到第一距 离数据; 根据所述第二反射点云数据和所述预设相机中心位置数据进行距离计算处理,得 到第二距离数据; 当所述第一距离数据小于所述第二距离数据时,将所述第一反射点云数据确定为 可靠点云数据。 优选的,在所述处理器接收三维点云成像装置发送的原始三维点云数据之前,所 述方法还包括: 三维点云成像装置接收外部输入的图像采集指令; 根据所述图像采集指令对目标场景进行拍摄,生成所述目标场景的原始三维点云 数据; 所述三维点云成像装置将所述原始三位点云数据发送给所述处理器。 进一步优选的,所述三维点云成像装置为飞行时间相机。 优选的,所述方法还包括: 6 CN 111583392 A 说 明 书 3/8 页 所述处理器将所述物体三维点云数据发送给显示设备; 所述显示设备根据所述物体三维点云数据进行显示输出。 第二方面,本发明提供了一种物体三维重建系统,所述系统包括:三维点云成像装 置、第一反射装置、第二反射装置和处理器; 所述三维点云成像装置,用于接收外部输入的图像采集指令,并根据所述图像采 集指令对目标场景进行拍摄,生成所述目标场景的原始三维点云数据; 所述第一反射装置,用于将所述三维点云成像装置发射的光反射到物体表面和将 物体表面反射的光二次反射到所述三维点云成像装置; 所述第二反射装置,用于将所述三维点云成像装置发射的光反射到物体表面和将 物体表面反射的光二次反射到所述三维点云成像装置; 所述处理器,用于接收三维点云成像装置发送的原始三维点云数据;其中,所述原 始三维点云数据包括多个第一点云数据; 所述处理器,还用于根据所述第一点云数据和预设感兴趣区域数据进行位置判断 处理,确定所述第一点云数据对应的第一点云点是否在所述预设感兴趣区域数据对应的感 兴趣区域内; 当所述第一点云点在所述感兴趣区域内时,所述处理器,还用于将所述第一点云 数据确定为可靠点云数据,并将所述第一点云数据保存在物体三维点云数据中; 当所述第一点云点不在所述感兴趣区域内时,所述处理器,还用于根据所述第一 点云数据、预设镜面方程数据和所述预设感兴趣区域数据确定第一镜面方程数据; 所述处理器,还用于根据第一点云数据和第一镜面方程数据进行反射变换处理, 得到第一反射点云数据; 所述处理器,还用于根据所述第一反射点云数据和所述预设感兴趣区域数据进行 位置判断处理,确定所述第一反射点云数据对应的第一反射点云点是否在所述感兴趣区域 内; 当所述第一反射点云点在所述感兴趣区域内时,所述处理器,还用于根据第一反 射点云数据和第二镜面方程数据进行反射变换处理,得到第二反射点云数据; 所述处理器,还用于根据所述第一点云数据、所述第二反射点云数据和预设相机 中心位置数据确定所述第一反射点云数据是否为可靠点云数据; 当所述第一反射点云数据为可靠点云数据时,所述处理器,还用于将所述第一反 射点云数据保存在所述物体三维点云数据中。 优选的,所述系统还包括显示设备: 所述显示设备,用于接收所述处理器发送的物体三维点云数据; 所述显示设备,还用于根据所述物体三维点云数据进行显示输出。 进一步优选的,所述系统还包括: 所述三维点云成像装置与所述处理器通过有线或无线方式进行通信连接; 所述处理器与所述显示设备通过有线或无线通信方式进行通信连接。 本发明实施例提供的一种物体三维重建方法,通过使用飞行时间相机采集一帧目 标场景的图像,生成原始三维点云数据,并对采集生成的原始三维点云数据结合预设的场 景信息数据进行分析,确定原始三维点云数据中的可靠点云数据,经过由原始三维点云数 7 CN 111583392 A 说 明 书 4/8 页 据中的点云点生成可靠点云数据,最后由多个从原始三维点云中确定的可靠点云数据和生 成的可靠点云数据共同组成物体三维点云数据,以完成物体的三维点云重建。本发明实施 例提供的方法算法简单、相应的系统结构简单,能够在降低设备成本的基础上,完成对动态 和静态物体进行三维点云的重建。 附图说明 图1为本发明实施例提供的一种物体三维重建系统示意图; 图2为本发明实施例提供的一种物体三维重建方法流程图。











