
技术摘要:
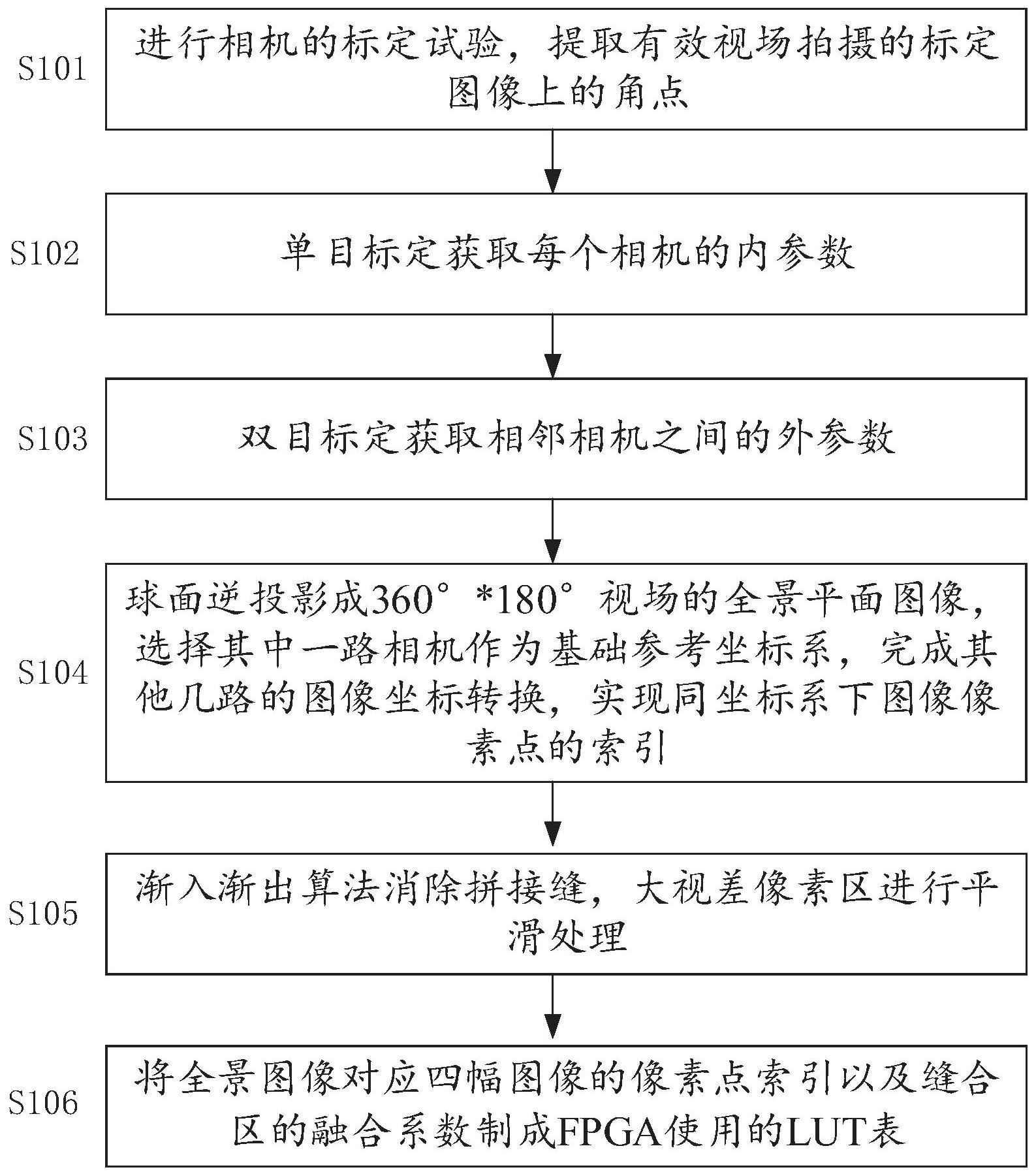
本申请提供了一种适用于太空复杂环境的快速全景拼接技术,所述方法至少包括以下步骤:S101,进行相机的标定试验,提取有效视场拍摄的标定图像上的角点;S102,单目标定获取每个相机的内参数;S103,双目标定获取相邻相机之间的外参数;S104,球面逆投影成360°*180°视场 全部
背景技术:
全景视觉是指一次获得大于半球视场(360°x 180°)的三维空间的 全部视觉信 息。获得全景视觉需要特殊的视觉传感器系统。全景视觉作 为三维空间信息获取最直接的 方式在许多领域都有广泛的应用,尤其对 于民用、军事还有宇航空间等通过视觉信息做出 决策的领域和行业具有 非常重要的意义。 目前获取全景视觉图像的方法有:(1)普通视觉传感器 旋转云台 的方法,普通视 觉传感器视场有限,依靠云台旋转增大视场;(2)复眼 技术 图像拼接的方法,利用多台视 觉传感器同时获取视场不同角度的视 觉图像,然后实现图像的无缝拼接;(3)利用鱼眼成 像技术,鱼的眼睛 可以一次观察到接近半球的视场范围,根据鱼眼成像的原理特殊制造的 鱼眼镜头是利用多组透镜组合而成,成像原理复杂,价格也相对昂贵; (4)利用凸面反射镜 普通视觉传感器的方法。 现有技术成本过高,在复杂的太空环境成像不够稳定,拼接效果不 理想。
技术实现要素:
针对现有技术中的缺陷,本申请实施例提供了一种适用于太空复杂 环境的快速 全景拼接方法。所述技术方案如下: 一种适用于太空复杂环境的快速全景拼接方法,所述方法至少包括以 下步骤: S101,进行相机的标定试验,提取有效视场拍摄的标定图像上的角点; S102,单目标定获取每个相机的内参数; S103,双目标定获取相邻相机之间的外参数; S104,球面逆投影成360°*180°视场的全景平面图像,选择其中一路 相机作为基 础参考坐标系,完成其他几路的图像坐标转换,实现同坐标系 下图像像素点的索引; S105,渐入渐出算法消除拼接缝,大视差像素区进行平滑处理; S106,将全景图像对应四幅图像的像素点索引以及缝合区的融合系数 制成供现 场可编程逻辑门阵列(Field Programmable Gate Array,FPGA)使 用的查找表(Look Up Table,LUT)。 在一个可能的实现方式中,所述步骤S102包括: 采用模板匹配的方法提取黑白棋盘标定板上的角点坐标,计算得鱼眼 相机的内 参数和畸变系数。 在一个可能的实现方式中,所述步骤S103包括: 利用相邻的两个鱼眼相机进行双目标定,得到相机外参数,即旋转矩 阵和平移矩 阵,从而得到每两相邻的相机之间的旋转矩阵。 3 CN 111583117 A 说 明 书 2/4 页 在一个可能的实现方式中,所述步骤S104包括: 所述多个相机水平等间隔环绕装置,且所述相机的光心均在圆心上。 在一个可能的实现方式中,所述步骤S105包括: 采用渐入渐出融合算法消除拼接缝,对于近距离的大视差像素进行平 滑处理。 在一个可能的实现方式中,所述全景图像的像素索引为球面等距逆投 影得到拍 摄图像的对应像素点坐标;所述融合系数从渐入渐出融合算法计 算获得。 本发明还提供了一种适用于太空复杂环境的快速全景拼接装置,所述 装置包括: 标定模块,用于进行相机的标定试验,提取有效视场拍摄的标定图像 上的角点; 第一参数获取模块,单目标定获取每个相机的内参数; 第二参数获取模块,双目标定获取相邻相机之间的外参数; 坐标转换模块,球面逆投影成360°*180°视场的全景平面图像,选择 其中一路相 机作为基础参考坐标系,完成其他几路的图像坐标转换,实现 同坐标系下图像像素点的索 引; 像素拼接模块,渐入渐出消除拼接缝,大视差像素区进行平滑处理; LUT生成模块,将全景图像对应四幅图像的像素点索引以及缝合区的 融合系数制 成供FPGA使用的LUT表。 在一个可能的实现方式中,所述第一参数获取模块用于:采用模板匹 配的方法提 取黑白棋盘标定板上的角点坐标,计算得鱼眼相机的内参数和 畸变系数。 在一个可能的实现方式中,所述第二参数获取模块用于: 利用相邻的两个鱼眼相机进行双目标定,得到相机外参数,即旋转矩 阵和平移矩 阵,从而得到每两相邻的相机之间的旋转矩阵。 在一个可能的实现方式中,所述多个相机水平等间隔环绕装置,且所 述相机的光 心均在圆心上。 本申请实施例提供的技术方案带来的有益效果至少包括: 1.本发明实现了多路鱼眼相机组成的全景摄像机,FPGA硬件完成全 景拼接算法, 整机结构简易,工程成本低; 2.本发明成功实现了实时的高分辨率的360°全景图像拍摄,且拼接 误差小,成像 稳定,适用于太空复杂环境。 附图说明 为了更清楚地说明本申请实施例中的技术方案,下面将对实施例描述 中所需要 使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅 是本申请的一些实施例, 对于本领域普通技术人员来讲,在不付出创造性 劳动的前提下,还可以根据这些附图获得 其他的附图。 图1为本申请一个示例性实施例提供的多路鱼眼相机的全景图像拼接 流程示意 图; 图2为本申请一个示例性实施例提供的全景摄像机视场图。 4 CN 111583117 A 说 明 书 3/4 页











