
技术摘要:
本发明是一种空基监视平台的轨道障碍物零样本分类方法及装置,涉及航空监视和轨道障碍物检测技术领域。本发明装置包括图片采集器、障碍物目标提取器、目标映射网络、语义向量生成器、语义向量映射网络、基于余弦度量的最近邻分类器和警报器。本发明方法通过无人机采集 全部
背景技术:
空基监视平台用于全天时大范围保障轨道交通系统的正常运行。该平台维护轨道 交通系统的重要任务之一是准确进行轨道障碍物检测。 传统的轨道障碍物检测分为实时检测和非实时检测。非实时检测主要包括检测车 排障和人工检查。这两种方法是在设备运行前进行故障排查保证轨道可以正常使用。但是 如果在两次排查之间无法及时发现轨道故障,容易引发严重的车辆脱轨侧翻事故。实时检 测主要包括固定的视频监控,红外摄像,检测雷达等技术。但是这些系统由于误检率高,容 易产生虚警,造成列车紧急停车,严重降低铁路运输效率。目前的解决方案是在该实时系统 上添加大量的人工判断,十分耗费人力物力。空基监视平台的机动性大大增加了实时轨道 障碍物检测的灵活性,与传统实时检测相比可以实现轨道线路的全覆盖。 由于空基实时检测系统的机动性,不停变换的场景增加了检测系统中障碍物分类 难度,训练一个可区分所有障碍物的检测器十分困难。主要原因在于以下两个方面:(1)轨 道障碍物类别未知不确定。尽管轨道交通部分为了保障列车运行安全对部分线路进行了封 闭,但是仍然有大量的自然因素和人为破坏造成轨道遮挡。轨道障碍物的种类繁多,传统深 度学习分类器的类别不能覆盖所有可能的种类,因此会造成误检和虚警。(2)缺少训练样 本。传统深度学习分类器在训练过程中每一个训练类别需要大量的训练样本防止过拟合。 但是部分轨道障碍物的样本图片很难采集。这就直接导致传统深度学习分类器在缺少训练 样本的类别上失效。在实际应用中,分类器不仅需要对可见类别进行分类,也需要对从不可 见类别进行分类。不可见类别没有训练样本参与分类器的训练过程。因此,基于训练样本匮 乏或没有的情况下,如何在空基实时检测系统上实现轨道障碍物检测,是一个亟待解决的 问题。
技术实现要素:
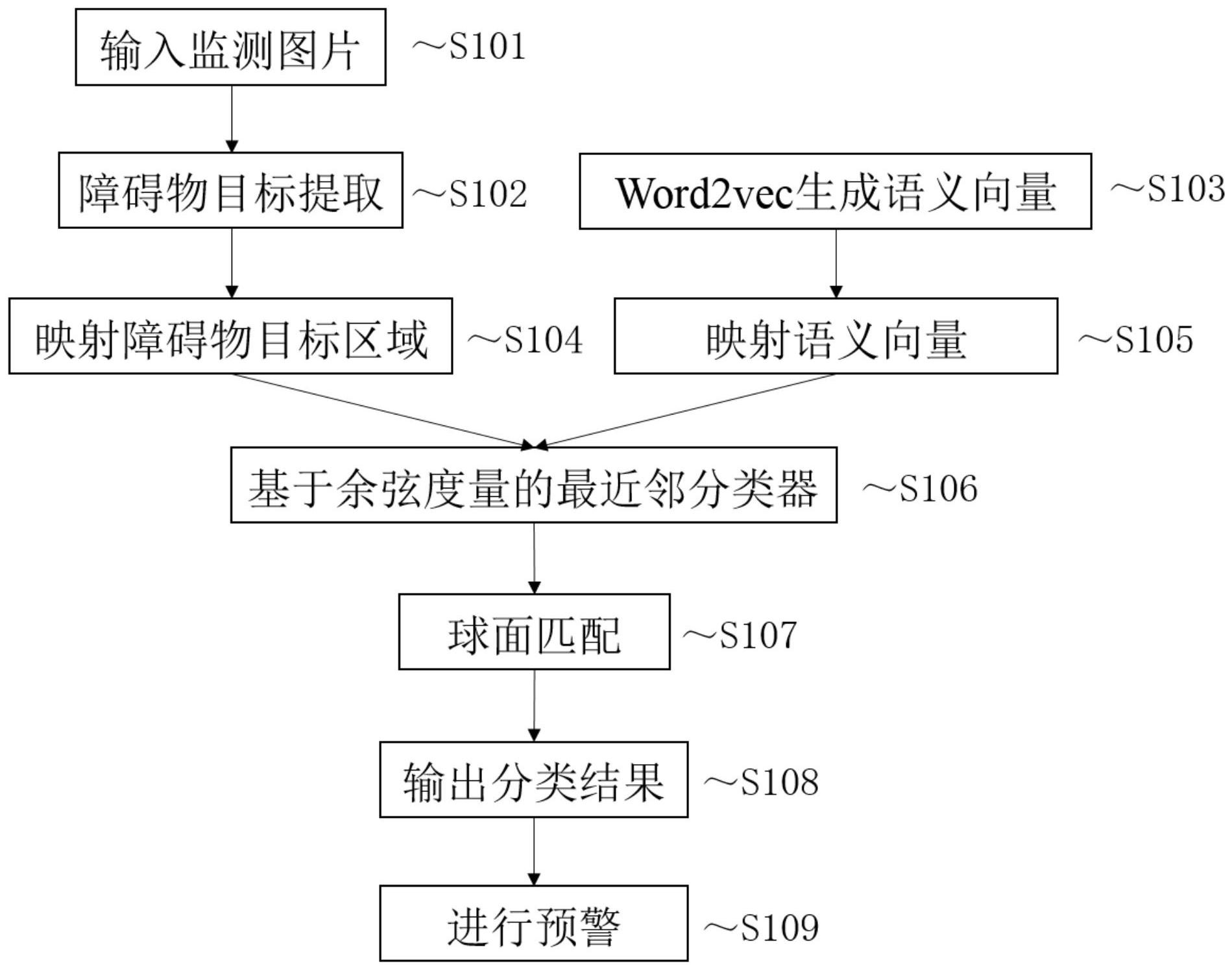
针对目前空基实时检测系统在检测轨道障碍物时,由于训练样本匮乏或缺失而导 致障碍物检测困难的问题,本发明提出了一种空基监视平台的轨道障碍物零样本分类方法 及装置,可以实现空基监视平台在障碍物目标类别不可见(没有训练样本)的极端情况下的 轨道障碍物排查,并提高了轨道障碍物的分类准确率,降低了误检虚警率。 本发明的一种空基监视平台的轨道障碍物零样本分类方法,根据是否有训练样本 将障碍物分为可见类别和不可见类别,在训练阶段,利用可见类别障碍物的样本训练分类 器,在测试阶段,利用训练好的分类器对铁轨图片进行障碍物分类。本发明方法包括: 步骤(1)通过无人机采集铁轨的图片;图片输入前景检测器从中提取障碍物目标 区域,并将提取的区域图片裁剪为统一的尺寸大小; 4 CN 111582069 A 说 明 书 2/7 页 在训练阶段,由步骤(1)获取可见类别障碍物的样本,样本为设定大小的障碍物目 标区域图片,样本的标签为障碍物的类别标签; 步骤(2)对障碍物的类别名称使用Word2vec技术生成相应的语义向量; 步骤(3)对剪裁后的障碍物目标区域进行映射,映射到一个维度为W的嵌入空间 中,得到障碍物目标区域的视觉特征;W为正整数;所用到的映射网络为3层感知机网络; 步骤(4)对障碍物类别名称的语义向量进行映射,映射到维度为W的嵌入空间中, 得到各障碍物类别名称的语义特征;所用到的映射网络为一个有20个卷积层和1个全局平 均池化层的神经网络,每四个卷积层为一组卷积模块,每组卷积模块包含一次下采样; 在训练阶段,对可见类别障碍物的类别名称的语义向量提取语义特征; 步骤(5)设计基于余弦度量的最邻近分类器,将某障碍物目标区域的视觉特征和 所有可见类别输入基于余弦度量的最邻近分类器,实现对障碍物分类; 步骤(6)使用训练样本对步骤(3)和步骤(4)中的映射网络进行训练,获取训练好 的最邻近分类器; 在训练阶段,对可见类别障碍物的视觉特征和所有可见类别的语义特征进行球面 匹配,优化映射网络中的所有网络参数,本发明一方面要求映射后的语义向量两两之间的 距离尽可能的远,一方面要求映射前后的语义向量保持相同的几何结构信息; 步骤(7)利用训练好的最邻近分类器实时对无人机拍摄的图片进行障碍物分类。 无人机采集的铁轨图片经前景检测器提取障碍物目标区域,并裁剪到统一的尺寸后,通过 训练好的映射网络得到视觉特征,将不可见类别的类别名称的语义向量通过训练好的映射 网络得到语义特征;将所得到的视觉特征与所有障碍物的类别名称的语义特征输入训练好 的最邻近分类器,获取障碍物类别,进而判断该障碍物目标的危险等级并预警。 本发明的一种空基监视平台的轨道障碍物零样本分类装置,包括:图片采集器、障 碍物目标提取器、目标映射网络、语义向量生成器、语义向量映射网络、基于余弦度量的最 近邻分类器和警报器。 所述的图片采集器由无人机搭载摄像机实现,拍摄铁轨的图片并输入障碍物目标 提取器。 所述的障碍物目标提取器利用前景检测器从图片中提取障碍物目标区域,并将提 取的区域图片裁剪为统一的尺寸大小,输出到目标映射网络。 所述的目标映射网络对输入的障碍物目标区域进行映射,映射到一个维度为W的 嵌入空间中,作为障碍物目标区域的视觉特征;目标映射网络为一个有20个卷积层和1个全 局平均池化层的神经网络,每四个卷积层为一组卷积模块,每组卷积模块包含一次下采样。 所述的语义向量生成器使用Word2vec技术生成障碍物类别名称的语义向量。 所述的语义向量映射网络将所述的语义向量映射到维度为W的嵌入空间中,得到 障碍物类别的语义特征;语义向量映射网络为3层感知机网络。 所述的基于余弦度量的最近邻分类器根据障碍物目标区域的视觉特征和障碍物 类别的语义特征,对障碍物分类。 所述的警报器根据最近邻分类器对障碍物的分类结果,进行不同程度的预警。 在训练阶段,对目标映射网络和语义向量映射网络中的参数进行优化,获取训练 好的最邻近分类器。然后利用训练好的目标映射网络、语义向量映射网络以及最邻近分类 5 CN 111582069 A 说 明 书 3/7 页 器对图片采集器采集的图片进行障碍物分类。 本发明与现有技术相比,具有以下优势和积极效果: (1)与传统分类器相比,本发明方法及装置在实际应用中,可以对检测过程中发现 的未知类别的障碍物进行分类,解决空基监视平台进行障碍物排查时,障碍物目标类别不 可见(没有训练样本)的极端情况,并可根据轨道专家划分的危险等级进行不同程度的预 警。 (2)本发明采用深度学习方法建立网络模型进行分类,采用球面匹配来优化模型 中参数,一方面增大类间差距提高容错率,另一方面保留原始语义向量的几何结构,增强映 射函数的鲁棒性,提高网络的泛化能力,从而实现在训练样本匮乏或缺失的情况下,实现对 未知障碍物的检测,提高了轨道障碍物的分类准确率,降低了误检虚警率。 附图说明 图1是本发明实施例提供的一种空基监视平台的轨道障碍物零样本分类方法流程 示意图; 图2是本发明障碍物目标区域的映射网络示意图; 图3是本发明障碍物目标区域的映射网络中的卷积模块的示意图; 图4是本发明实施例提供的一种空基监视平台的轨道障碍物零样本分类装置的示 意图。











