
技术摘要:
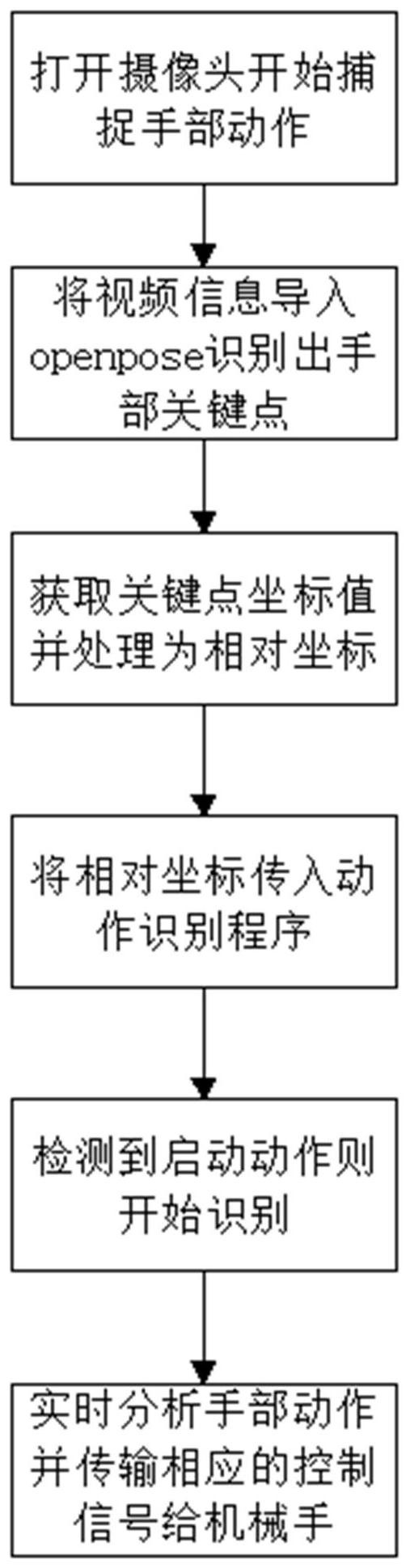
本发明公开了一种通过摄像头远程操作机械手的方法,包括以下步骤:S1:画面传输;S2:识别手部动作关键点;S3:转化坐标;S4;信息传输,利用图像传感器,将感光单位所产生的信号加载一起,构成一幅完整的画面,并通过摄像头进行实时画面的传输,将摄像头采集的视频信 全部
背景技术:
近年来,随着机械手操控技术的发展,尤其是通过采集人手动作数据以模拟人手 动作的机械手操控技术,使机械手在各行业具有很大的应用前景。在该类操控技术中,常通 过外骨骼、数据手套等穿戴设备对人手动作数据进行采集,而这类穿戴设备的采集是基于 其上的传感器,导致其售价偏高,很难实用化,尤其是民用化。 此外,随着机器人技术的快速发展,尤其是民用服务机器人及类人机器人技术,对 低成本类操控技术的需求也越来越大,尤其是可对机械手进行远程控制的遥操作技术,然 而现有的机械手容易受硬件影响,识别手部动作略有延迟。 因此,我们需要一种通过摄像头远程操作机械手的方法,利用摄像头对操作物的 实际操作画面进行采集,通过openpose识别出手部的关键点,将其转化为相对坐标,分析出 具体的手部动作,最后转化为控制信号控制机械手动作,避免延迟现象的发生,提高机械手 的工作效率和准确率。
技术实现要素:
本发明的目的在于提供一种通过摄像头远程操作机械手的方法,利用摄像头对操 作物的实际操作画面进行采集,通过openpose识别出手部的关键点,将其转化为相对坐标, 分析出具体的手部动作,最后转化为控制信号控制机械手动作,避免延迟现象的发生,提高 机械手的工作效率和准确率,以解决上述











