
技术摘要:
本发明提供能够更快速为紧急车辆接近做准备的车辆控制装置、车辆控制方法及存储介质。车辆控制装置具备:识别部,其识别本车辆的周边状况;以及驾驶控制部,其基于所述识别部的识别结果控制所述本车辆的加减速,所述驾驶控制部使所述本车辆至少在第一驾驶状态和自动化 全部
背景技术:
以往,已知有一种在解析通过本车辆具备的相机拍摄的图像来确定紧急车辆的情 况下使本车辆减速并向路肩靠近的技术(例如美国专利申请公开第2016/0252905号说明 书)。
技术实现要素:
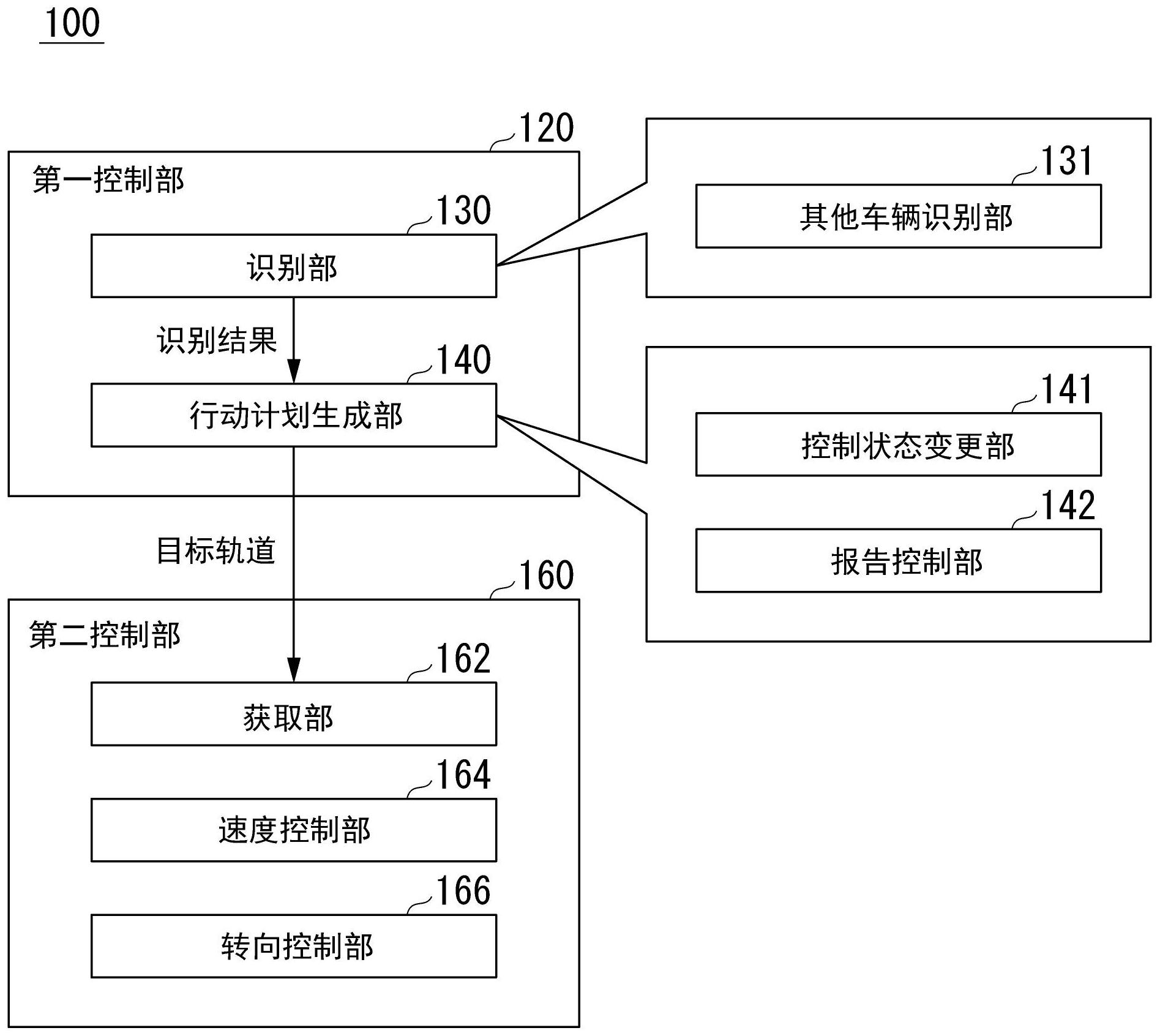
但是,在现有技术中,在紧急车辆接近本车辆的紧后方为止很难识别紧急车辆。在 该情况下,根据紧急车辆接近的情况直至切换本车辆的自动驾驶状态为止需要时间,存在 无法快速为紧急车辆接近做准备的情况。 本发明的方案是考虑这样的情况提出的,目的之一在于提供能够更快速为紧急车 辆接近做准备的车辆控制装置、车辆控制方法及存储介质。 用于解决课题的方案 本发明的车辆控制装置、车辆控制方法及存储介质采用以下构成。 (1):本发明一方案的车辆控制装置具备:识别部,其识别本车辆的周边状况;以及 驾驶控制部,其基于所述识别部的识别结果控制所述本车辆的加减速,所述驾驶控制部,使 所述本车辆至少在第一驾驶状态和自动化率高于所述第一驾驶状态或对乘员的要求任务 较少的第二驾驶状态中的任一状态下动作,所述驾驶控制部在所述本车辆以所述第一驾驶 状态动作的情况下,基于有无通过所述识别部识别到位于所述本车辆的后方的后方车辆和 后方车辆的检测状况中的至少一者,使所述本车辆的驾驶状态转变为所述第二驾驶状态。 (2):在上述(1)方案的基础上,所述驾驶控制部在所述本车辆以所述第一驾驶状 态动作的情况下,在通过所述识别部识别到的所述后方车辆与所述本车辆之间的车间距离 为第一规定距离以下的情况下使驾驶状态向所述第二驾驶状态转变。 (3):在上述(1)或(2)方案的基础上,所述驾驶控制部在所述本车辆的车速低于规 定车速的情况下使驾驶状态从所述第一驾驶状态转变为所述第二驾驶状态,所述识别部在 所述本车辆以第一驾驶状态动作的情况下执行识别所述后方车辆的处理。 (4):在上述(1)~(3)中任一方案的基础上,所述驾驶控制部在所述第二驾驶状态 下未由所述识别部识别到所述后方车辆的情况下使驾驶状态转变为所述第一驾驶状态。 (5):在上述(1)~(4)中任一方案的基础上,所述驾驶控制部在通过所述识别部识 别到的所述后方车辆与所述本车辆之间的车间距离为第二规定距离以上的情况下,或通过 所述识别部识别到的所述后方车辆行驶的行驶路径与所述本车辆行驶的行驶路径在车宽 方向上的距离为第三规定距离以上的情况下使驾驶状态转变为所述第一驾驶状态。 (6):在上述(5)方案的基础上,第二规定距离为与所述本车辆的行驶速度对应的 值。 4 CN 111731321 A 说 明 书 2/14 页 (7):在上述(1)~(6)中任一方案的基础上,所述驾驶控制部在所述第一驾驶状态 下通过所述识别部识别到的所述后方车辆为规定类别的情况下使驾驶状态转变为所述第 二驾驶状态,在通过所述识别部识别到的所述后方车辆非所述规定类别的情况下抑制驾驶 状态转变为所述第二驾驶状态。 (8):在上述(1)~(7)中任一方案的基础上,所述驾驶控制部在所述第一驾驶状态 下所述本车辆与所述后方车辆在车宽方向上的距离为第四规定距离以上的情况下抑制驾 驶状态转变为所述第二驾驶状态。 (9):在上述(1)~(8)中任一方案的基础上,所述驾驶控制部在所述第二驾驶状态 下在通过所述识别部识别多台所述后方车辆且识别到所述多台所述后方车辆中的最接近 所述本车辆的位置的第一后方车辆和位于所述第一后方车辆的后方的第二后方车辆的情 况下,使所述第二驾驶状态持续,在通过所述识别部识别到所述第一后方车辆且未识别到 所述第二后方车辆的情况下使驾驶状态转变为所述第一驾驶状态。 (10):本发明一方案的车辆控制方法为,计算机识别本车辆的周边状况,基于识别 结果控制所述本车辆的加减速,使所述本车辆至少在第一驾驶状态和自动化率高于所述第 一驾驶状态或对乘员的要求任务较少的第二驾驶状态中的任一状态下动作,在所述本车辆 以所述第一驾驶状态动作的情况下,基于有无被识别到位于所述本车辆的后方的后方车辆 和后方车辆的检测状况中的至少一者,使所述本车辆的驾驶状态转变为所述第二驾驶状 态。 (11):本发明一方案的存储介质存储有程序,该程序使计算机识别本车辆的周边 状况,基于识别结果控制所述本车辆的加减速,使所述本车辆至少在第一驾驶状态和自动 化率高于所述第一驾驶状态或对乘员的要求任务较少的第二驾驶状态中的任一状态下动 作,在所述本车辆以所述第一驾驶状态动作的情况下,基于有无被识别到位于所述本车辆 的后方的后方车辆和后方车辆的检测状况中的至少一者,使所述本车辆的驾驶状态转变为 所述第二驾驶状态。 根据上述(1)~(11)方案,能够更快速为紧急车辆的接近做准备。 根据上述(6)方案,能够根据本车辆的车速更恰当地为紧急车辆的接近做准备。 根据上述(7)方案,能够抑制自动驾驶水平无秩序地变更。 根据上述(8)方案,在不适当的情形下,能够抑制从第一驾驶状态转变为第二驾驶 状态。 附图说明 图1是利用第一实施方式的车辆控制装置的车辆系统的构成图。 图2是第一控制部及第二控制部的功能构成图。 图3是示出第一实施方式(条件1)的进行驾驶状态转变的情形的一例的图。 图4是示出本车辆M的车速与第一规定距离的对应的一例的图。 图5是示出第一实施方式(条件2)的进行驾驶状态转变的情形的一例的图。 图6是示出第一实施方式(条件3)的进行驾驶状态转变的情形的一例的图。 图7是示意性示出设为能够从第一驾驶状态转变为第二驾驶状态的状态的处理的 开始条件的图。 5 CN 111731321 A 说 明 书 3/14 页 图8是示出第一实施方式的设为能够从第一驾驶状态转变为第二驾驶状态的状态 的处理开始的流程图的一例的图。 图9是示出第一实施方式的自动驾驶控制装置的一连串处理的一例的流程图。 图10是示出变形例1(条件3)的进行驾驶状态转变的情形的一例的图。 图11是示出变形例2(条件4)的进行驾驶状态转变的情形的一例的图。 图12是示出变形例1及变形例2的自动驾驶控制装置的一连串处理的一例的流程 图。 图13是示出第二实施方式的进行驾驶状态转变的情形的一例的图。 图14是示出第二实施方式的未进行驾驶状态转变的情形的一例的图。 图15是示出第二实施方式的自动驾驶控制装置的一连串处理的一例的流程图。 图16是示出自动驾驶控制装置的硬件构成的一例的图。











