
技术摘要:
本发明公开了一种血管介入手术机器人,属于医疗设备领域。它用作代替人手进行血管介入手术,包括推进装置、捻旋装置、导丝引导装置、压丝装置、床边定位装置五个模块,推进装置带动捻旋装置夹持导丝导管进行直线移动。捻旋装置带动与大齿轮同轴的二指卡盘夹持导丝导管 全部
背景技术:
血管介入手术是指医生在数字减影血管造影机(DSA)的导引下,操纵导管在人体 血管内运动,对病灶进行治疗,达到栓塞畸形血管、溶解血栓、扩张狭窄血管等目的。与传统 “开放”手术相比,本方法具有创伤小、安全有效、术后恢复快、并发症少等优点。血管介入手 术的主要步骤就是将导管推送到病灶位置,并进行相应的诊断和治疗。因此,能否将导管送 到精确的病灶位置直接影响整个手术的质量和患者的健康。人工介入导管存在很多弊端: (1)医生在X射线环境下工作,长期操作对身体伤害很大;(2)现有手术方法技巧性强,风险 性高,专科医生手术培训时间长,限制了该项技术的广泛应用;(3)由于操作复杂、手术时间 长,医生疲劳和人手操作不稳定等因素会直接影响手术质量,进而影响患者生存质量。这些 缺点限制了血管介入手术的广泛应用,机器人技术与血管介入技术有机结合是解决上述问 题的重要途径。 本发明针对血管介入手术设计一款手术机器人,以减轻医生的负担与手术过程中 医生受到的辐射,同时提高手术的安全性。本发明通过机械结构对手术过程中人手的推拉、 捻搓、压丝等操作步骤进行模拟,且更加安全有效。
技术实现要素:
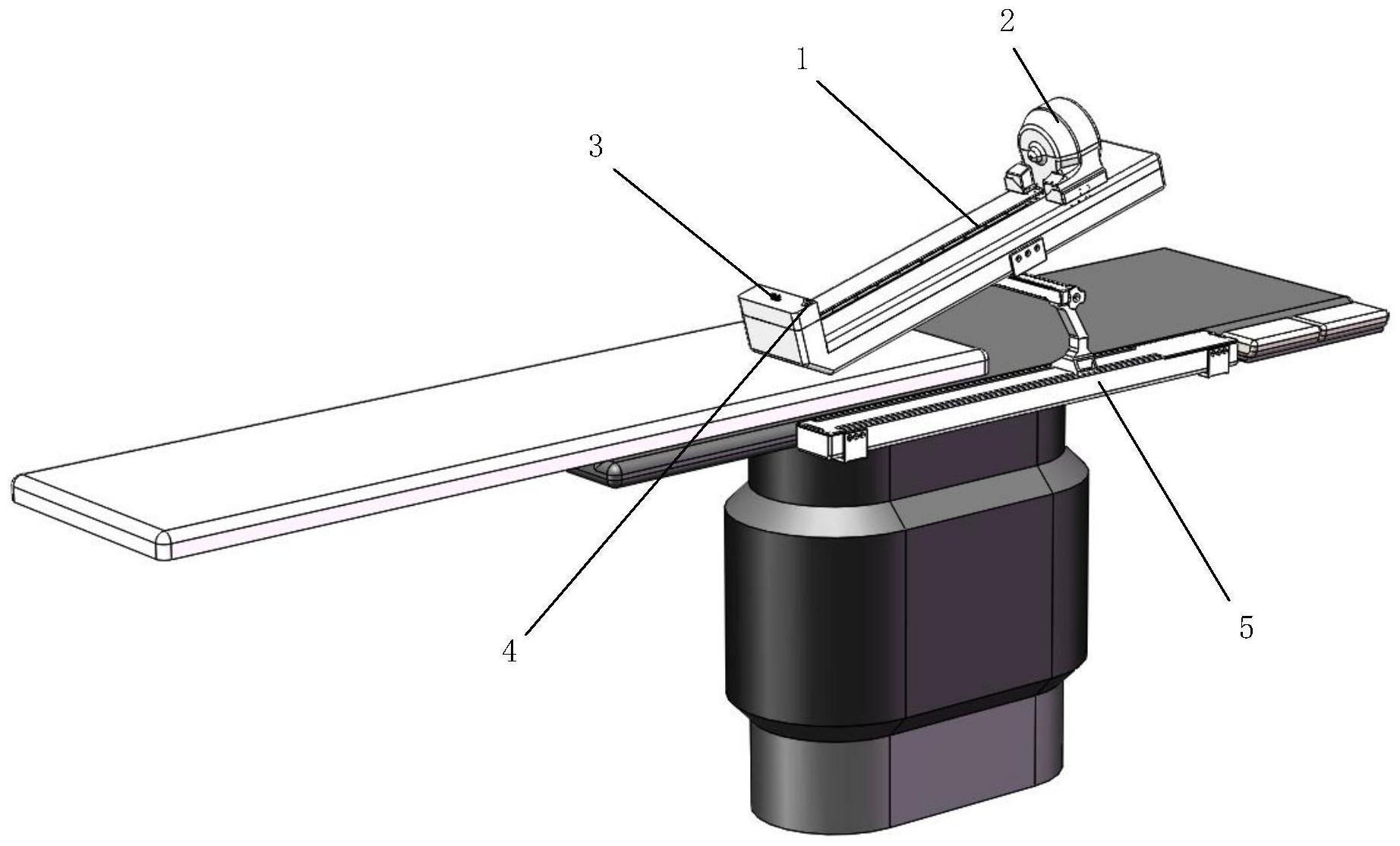
本发明提出了一种血管手术机器人的模型,其中共包括五个功能模块:推进装置、 捻旋装置、导丝引导装置、压丝装置以及床边定位装置。推进装置实现导管导丝的直线进 退;捻旋装置实现导丝的旋转;引导装置用于引导导管导丝的前进与后退;压丝装置的作用 是在导丝到达病灶之后固定其位置,以便于后续导管、球囊、支架等介入器械的进入。各个 功能模块共同协调作用,可以有效实现血管介入手术机器人的精确导丝导管介入的作用。 优选的,装置的推进装置主要通过滚珠丝杠、直线导轨以及电机实现。位于装置最 后的步进电机直接驱动滚珠丝杠的旋转,步进电机通过机架与主体底壳固定,丝杠上安装 的滑台通过两侧的直线导轨进行限位与导向,使其能够进行前后移动,这样就能够带动导 丝进行前后的推拉。该推进装置实用步进电机驱动滚珠丝杠的旋转带动滑台的移动,使用 直线导轨进行限位和导向,可以实现导管导丝直线方向的准确前进和后退。 优选的,捻旋装置安装在滑台上,捻旋功能主要通过一对齿轮副的周向旋转实现, 装置包括一对齿轮副、驱动电机以及二指卡盘。其中二指卡盘通过上下开合固定导管导丝。 捻旋装置可以很好的实现导管导丝的旋转运动,较高的还原了人手操作的搓捻动作。 优选的,导丝引导装置安装在滑台上,引导装置位于介入手术机器人的最前端。装 置主要通过一对滚轮进行引导,并利用凸轮对其进行中心距控制,凸轮由驱动电机直接控 制。导丝引导装置可以精确的对导丝的位置进行调节控制,实现导丝导管平顺的进行直线 移动。并起到支撑导丝导管的作用。 4 CN 111588471 A 说 明 书 2/5 页 在球囊、支架以及其他介入器材进入动脉前,需要先放入引导导丝,在引导导丝到 达病灶之后,再通过微导管将球囊、支架送达病灶。为了保证导丝末端的位置不变,在人工 手术当中需要医生边移动导丝边进行压丝操作,防止其随球囊导管一起轴向移动,这种细 微的操作极度考验医生的手术经验,也增加了医生的劳动强度和手术的不确定度。因此在 手术当中边移动导管边进行压丝操作是保证手术成功的关键之一。 优选的,设计中压丝装置运用二指电磁夹实现,当线圈通电时,衔铁由于电磁吸引 带动楔形块向上运动,此时两块夹板靠拢,电磁夹处于“合”的状态;当线圈断电时,衔铁不 再受到电磁吸引力,复位弹簧拉动楔形块向下运动,两块夹板此时向两侧移动,电磁夹处于 “开”状态。通过设计的压丝装置,可以实时对导丝导管进行压丝动作,确保导丝导管到达的 位置精准,解放了医生手动压丝动作,避免医生长时间压丝带来的操作疲劳。 优选的,本发明中的床边定位装置分为X轴移动装置和Y轴移动装置两部分组成, 定位装置通过两个自由度的移动实现导丝递送装置与患者的定位。通过两个方向的移动可 以适应患者不同身体位置的导丝动作。 有益效果在于: 1、血管介入手术机器人共有5个功能模块,各个功能模块共同协调作用,可以代替 医生手术动作,将导丝、导管安全准确的介入血管的相应的位置。 2、推进装置使用步进电机驱动滚珠丝杠的旋转带动滑台的移动,滑台沿着直线导 轨前景或者后退进行推送或抽出导丝、导管,可以实现导丝、导管沿着直线方向前进和后 退,通过控制滑台的移动速度可以有效调整导丝、导管推送的速度。 3、捻旋装置通过电机带动导丝、导管进行周向的旋转运动,可以很好的实现导丝、 导管的旋转运动,较高的还原了人手操作的搓捻动作,通过控制旋转的角度可以有效调整 导丝、导管最前端弯曲部位的方向,在遇到血管分叉路口时进入预定的血管中。 4、导丝引导装置主要通过一对引导轮进行引导,引导轮安装在下端导轨的直线滑 台上,可以随滑台进行水平方向移动,通过调整两个引导轮的中心距,可以控制引导装置夹 紧不同直径尺寸的导丝导管。引导轮上设计的凹槽结构可以很好的适应导丝、导管的圆形 结构。引导轮上安装有一次性轮套,每次手术可以更换新的轮套,安全卫生。导丝引导装置 实现导丝、导管平顺的进行直线移动。并起到支撑导丝、导管的作用。 5、压丝装置可以实时对导丝、导管进行压丝的动作,确保导丝、导管到达的位置精 准,解放了医生手动压丝的动作,避免医生长时间压丝带来的操作疲劳,设计中两块夹板沿 着直线运动实现电磁夹的开合,其与腔体之间安装有交叉滚子导轨,既限制了运动方向,又 使得整体结构更加紧凑。通过设计的楔形块结构的上下运动,推动两块夹板水平运动,楔形 块既实现了垂直方向运动的转化,同时也保证了两块夹板运动的对称性。 6、床边定位装置分为X轴移动装置和Y轴移动装置两部分,通过两个方向的移动可 以调整介入手术机器人的位置,以适应对患者不同身体位置的导丝导管介入动作。 附图说明 图1是血管介入手术机器人整体结构示意图 图2是血管介入手术机器人推进装置详细结构示意图 图3是血管介入手术机器人捻旋装置外部结构示意图 5 CN 111588471 A 说 明 书 3/5 页 图4是血管介入手术机器人捻旋装置内部结构示意图 图5是血管介入手术机器人捻旋装置剖面结构示意图 图6是血管介入手术机器人导丝引导装置详细结构示意图 图7是血管介入手术机器人压丝装置剖面结构示意图 图8是血管介入手术机器人床边定位装置X轴移动装置结构示意图 图9是血管介入手术机器人床边定位装置Y轴移动装置结构示意图 附图标记: 1、推进装置;2、捻旋装置;3、导丝引导装置;4、压丝装置;5、为床边定位装置;1-1、 滚珠丝杠;1-2、直线导轨;1-3、联轴器;1-4、丝杆固定支座;1-5、导轨滑块;1-6、直线导轨安 装座;1-7、电机架;1-8、丝杠螺母滑台;1-9、驱动电机;1-10、主体壳;2-1、上封装外壳;2-2、 下封装外壳;2-3、安装底座;2-4、步进电机;2-5、小齿轮;2-6、二指卡盘移动指;2-7、二指卡 盘;2-8、轴承端盖;2-9、滚针轴承;2-10、角接触球轴承;2-11、套筒;2-12、平键;2-13、大齿 轮;2-14、手轮;2-15、卡盘轴;2-16、大齿轮轴;3-1、驱动电机;3-2、引导装置支承;3-3、直线 导轨;3-4、导轨滑块;3-5、引导轮支承;3-6、引导轮;3-7、一次性轮套;3-8、凸轮轴;3-9、凸 轮;4-1、两块夹板;4-2、腔体;4-3、电磁线圈;4-4、平板;4-5、下腔体;4-6、滚针;4-7、4-8、交 叉滚子导轨;4-9、楔形块;4-10、复位弹簧;5-1、轴承座;5-2、导轨;5-3、滚珠丝杠;5-4、螺母 滑块;5-5、挡板;5-6、驱动电机;5-7、XY轴移动装置连接架;5-8、固定座;5-9、丝杠;5-10、螺 母滑块;5-11、手轮;











