
技术摘要:
本发明公开了一种路径规划方法及装置,通过判断生成的路径曲率是否连续,在生成的路径曲率不连续时,循环对路径进行预测,直至生成曲率连续的预测路径,确定曲率连续的预测路径为最终路径,最终路径的曲率绝对值小于第一预设阈值时才为规划路径输出,输出的路径真实反 全部
背景技术:
自动泊车系统是一种驾驶员辅助系统,在全自动泊车及待客泊车时,自动泊车系 统需要控制车辆准确无误地停在车位上,控制期间会涉及到轨迹跟踪。 自动泊车系统在轨迹跟踪过程中发现车辆偏离跟踪轨迹时,一般采用预瞄控制的 方式调整车辆行驶轨迹以使车辆回到跟踪轨迹。但是,预瞄控制的方式存在超调现象,当车 辆偏离跟踪轨迹较大时,采用预瞄控制的方式调整车辆行驶轨迹需要调整很长一段距离, 因此需要较长时间才能使偏离跟踪轨迹的车辆回到跟踪轨迹,导致自动泊车系统对车辆的 控制精度较低。
技术实现要素:
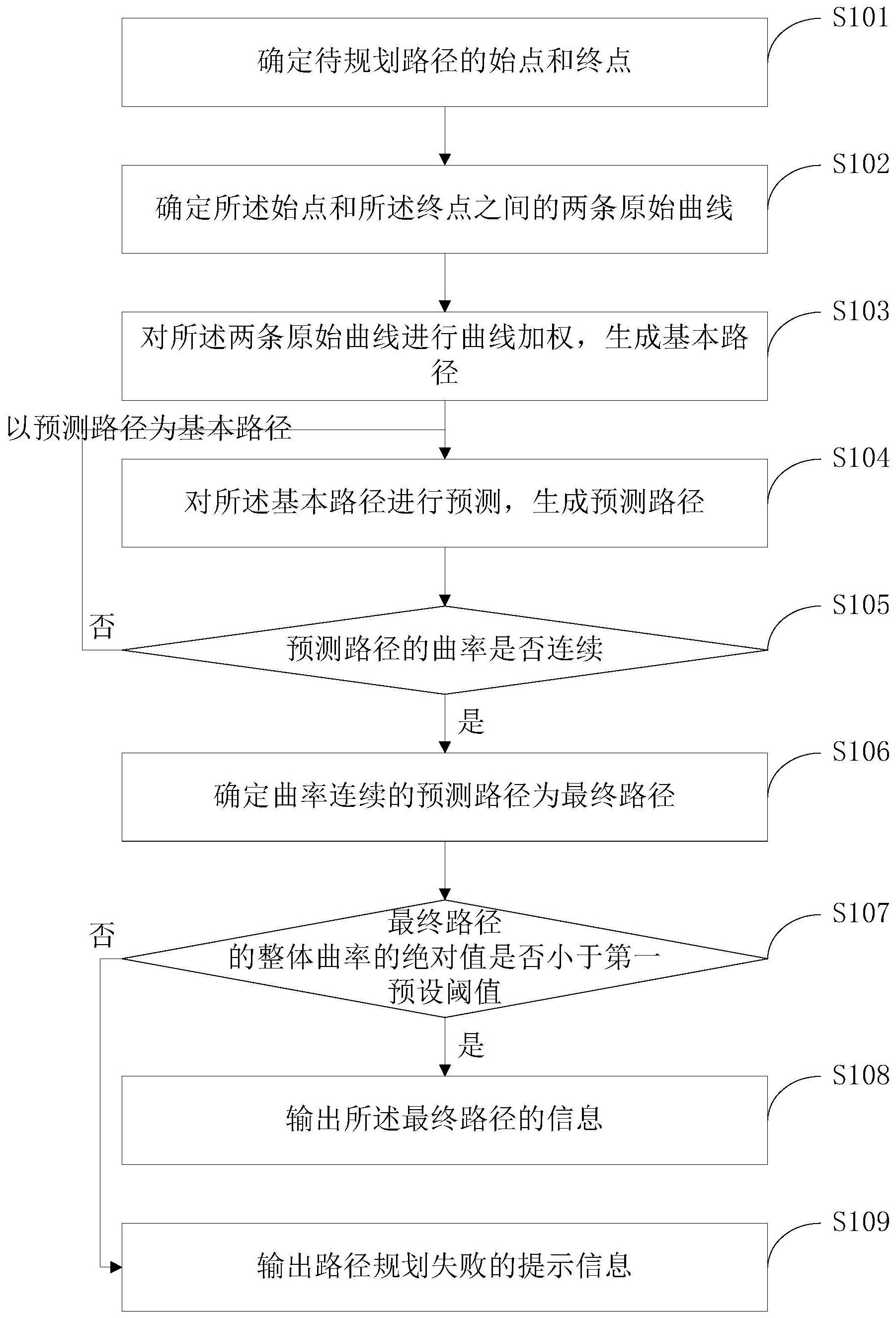
鉴于上述问题,提出了本发明以便提供一种克服上述问题或者至少部分地解决上 述问题的路径规划方法及装置。具体方案如下: 一种路径规划方法,所述方法包括: 确定待规划路径的始点和终点; 确定所述始点和所述终点之间的两条原始曲线; 对所述两条原始曲线进行曲线加权,生成基本路径; 对所述基本路径进行预测,生成预测路径; 判断所述预测路径的曲率是否连续,如果不连续,则以所述预测路径为基本路径, 返回执行对所述基本路径进行预测,生成预测路径的步骤,直至所述预测路径的曲率连续 为止; 确定曲率连续的预测路径为最终路径; 判断所述最终路径的整体曲率的绝对值是否小于第一预设阈值,如果是,则输出 所述最终路径的信息。 可选地,所述对所述基本路径进行预测,生成预测路径,包括: 基于预设的模型预测方法对所述基本路径进行预测,生成第一回旋曲线和第二回 旋曲线; 对所述第一回旋曲线的末点和所述第二回旋曲线的起点进行曲线加权,生成预测 路径。 可选地,所述基于预设的模型预测方法对所述基本路径进行预测,生成第一回旋 曲线和第二回旋曲线,包括: 计算所述基本路径的起始端的第一曲率以及所述基本路径的终止端的第二曲率; 确定所述始点对应的方向盘转角及所述终点对应的方向盘转角; 4 CN 111721309 A 说 明 书 2/11 页 根据车辆前轮转角与车辆转弯半径的关系,确定所述第一曲率对应的第一方向盘 转角,以及,所述第二曲率对应的第二方向盘转角; 根据车辆动力学预测从所述始点对应的方向盘转角转到所述第一方向盘转角的 第一运动轨迹,以及,从所述终端对应的方向盘转角转到所述第二方向盘转角的第二运动 轨迹; 确定所述第一运动轨迹为所述第一回旋曲线,所述第二运动轨迹为所述第二回旋 曲线。 可选地,所述预测路径与所述第一回旋曲线和第二回旋曲线形成两个拼接点,则 所述判断所述预测路径的曲率是否连续,包括: 判断所述两个拼接点曲率跳变是否大于第二预设阈值,如果大于则确定所述预测 路径的曲率不连续,如果不大于,则确定所述预测路径的曲率连续。 可选地,每次在以所述预测路径为基本路径,返回执行对所述基本路径进行预测, 生成预测路径的步骤之前,所述方法还包括: 获取当前循环次数; 判断所述当前循环次数是否达到第三预设阈值; 如果所述当前循环次数达到第三预设阈值,则不返回执行对所述基本路径进行预 测,生成预测路径的步骤; 如果所述当前循环次数未达到第三预设阈值,则返回执行对所述基本路径进行预 测,生成预测路径的步骤,并在所述当前循环次数的基础上加1作为新的当前循环次数。 一种路径规划装置,所述装置包括: 第一确定单元,用于确定待规划路径的始点和终点; 第二确定单元,用于确定所述始点和所述终点之间的两条原始曲线; 加权单元,用于对所述两条原始曲线进行曲线加权,生成基本路径; 预测单元,用于对所述基本路径进行预测,生成预测路径; 第一判断单元,用于判断所述预测路径的曲率是否连续,如果不连续,则触发预测 单元以所述预测路径为基本路径,对所述基本路径进行预测,生成预测路径的步骤,直至所 述预测路径的曲率连续为止; 第三确定单元,用于确定曲率连续的预测路径为最终路径; 第二判断单元,用于判断所述最终路径的整体曲率的绝对值是否小于第一预设阈 值,如果是,则输出所述最终路径的信息。 可选地,所述预测单元,具体用于: 基于预设的模型预测装置对所述基本路径进行预测,生成第一回旋曲线和第二回 旋曲线; 对所述第一回旋曲线的末点和所述第二回旋曲线的起点进行曲线加权,生成预测 路径。 可选地,所述预测单元,具体用于: 计算所述基本路径的起始端的第一曲率以及所述基本路径的终止端的第二曲率; 确定所述始点对应的方向盘转角及所述终点对应的方向盘转角; 根据车辆前轮转角与车辆转弯半径的关系,确定所述第一曲率对应的第一方向盘 5 CN 111721309 A 说 明 书 3/11 页 转角,以及,所述第二曲率对应的第二方向盘转角; 根据车辆动力学预测从所述始点对应的方向盘转角转到所述第一方向盘转角的 第一运动轨迹,以及,从所述终端对应的方向盘转角转到所述第二方向盘转角的第二运动 轨迹; 确定所述第一运动轨迹为所述第一回旋曲线,所述第二运动轨迹为所述第二回旋 曲线。 可选地,所述第一判断单元具体用于: 判断预测路径与所述第一回旋曲线和第二回旋曲线形成的两个拼接点曲率跳变 是否大于第二预设阈值,如果大于则确定所述预测路径的曲率不连续,如果不大于,则确定 所述预测路径的曲率连续。 可选地,预测单元每次在以所述预测路径为基本路径,执行对所述基本路径进行 预测,生成预测路径之前,还具体用于: 获取当前循环次数; 判断所述当前循环次数是否达到第三预设阈值; 如果所述当前循环次数达到第三预设阈值,则不执行对所述基本路径进行预测, 生成预测路径; 如果所述当前循环次数未达到第三预设阈值,则执行对所述基本路径进行预测, 生成预测路径,并在所述当前循环次数的基础上加1作为新的当前循环次数。 借由上述技术方案,本发明提供的一种路径规划方法及装置,通过判断生成的路 径曲率是否连续,在生成的路径曲率不连续时,循环对路径进行预测,直至生成曲率连续的 预测路径,确定曲率连续的预测路径为最终路径,最终路径的曲率绝对值小于第一预设阈 值时才为规划路径输出,输出的路径真实反映了未来车辆的实际运动状态,自动泊车系统 采用本发明的路径规划方法进行局部路径规划能进一步提升自动泊车系统对车辆的控制 精度。 上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段, 而可依照说明书的内容予以实施,并且为了让本发明的上述和其它目的、特征和优点能够 更明显易懂,以下特举本发明的











