
技术摘要:
本发明涉及一种用于无人驾驶机动车辆(2)的操作方法,该方法具有以下步骤:(S100)读取表示机动车辆(2)的计划驾驶操纵的行驶方向信息(FRI),(S200)通过至少行驶方向信息(FRI)的评估,检测计划驾驶操纵的路径区域(10)中的至少一个道路使用者(8),(S300)当在路径区域(10)中 全部
背景技术:
无人驾驶机动车辆(有时也称为自主陆地车辆)是可以在不受人类驾驶员(高度自 动驾驶或自主驾驶)影响的情况下驾驶、转向和停车的机动车辆。在不需要驾驶员手动控制 的情况下,还会使用术语“机器人车辆”。驾驶员座椅可以保持空置;可能没有方向盘、制动 踏板或油门踏板。 借助各种传感器,无人驾驶机动车辆可以获取其环境并且根据所获取的信息确定 该无人驾驶机动车辆的位置以及其他道路使用者的位置,通过无人驾驶机动车辆与导航软 件进行通信来行驶至目的地,并且避免在此途中发生碰撞。 这样的无人驾驶机动车辆必须能够与其周围环境通信,特别是与其他道路使用者 (例如行人)通信。例如,从WO 2018/021063 A1中已知一种用于无人驾驶机动车辆的照明系 统,其中在检测到道路使用者时改变光照参数,从而以这种方式通知已经被无人驾驶机动 车辆检测到的行人。 然而,关于无人驾驶机动车辆将会继续行驶的方向信息是无法获得的。 因此,需要指示可以向其他道路使用者(例如行人)告知无人驾驶机动车辆的计划 驾驶操纵的方式。
技术实现要素:
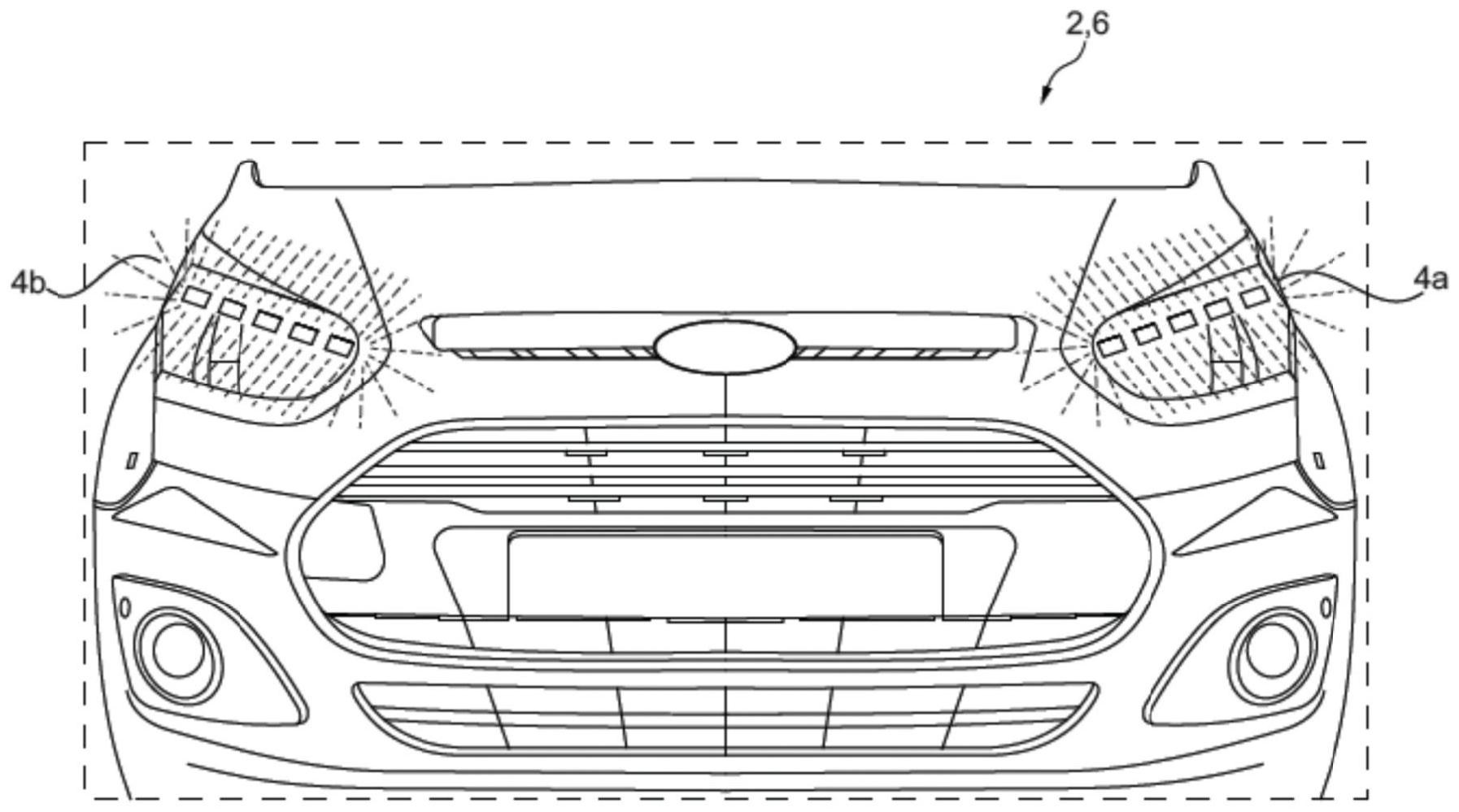
本发明的目的是通过一种用于无人驾驶机动车辆的操作方法来实现,该方法具有 以下步骤: 读取表示机动车辆的计划驾驶操纵的行驶方向信息, 通过至少行驶方向信息的评估,检测计划驾驶操纵的路径区域中的至少一个道路 使用者, 当在路径区域中检测到道路使用者时,至少通过评估行驶方向信息来确定用于机 动车辆的至少一个灯的操作的灯操作数据集,以及 根据灯操作数据集操作上述灯。 灯可以包含多个可单独操作的光源(例如LED),其可以使用灯操作数据集单独地 操作和/或成组地操作和/或全部地一次地操作。在确定灯操作数据集的框架内,已获取的 行驶方向信息根据预定代码进行编码。因此,通过根据灯操作数据集的灯的操作来再现与 机动车辆的计划驾驶操纵有关的编码的行驶方向信息。因此,向其他道路使用者(例如行 人)通知无人驾驶机动车辆的计划驾驶操纵。因为检测到道路使用者在计划驾驶操纵的路 径区域中的存在,并且只有这样才生成灯操作数据集,所以避免了对不涉及的道路使用者 的反应。因此,可以根据需要向其他道路使用者(例如行人)通知无人驾驶机动车辆的计划 驾驶操纵,为此目的不需要额外的照明装置(例如其他灯)。 3 CN 111546982 A 说 明 书 2/4 页 根据实施例的一种形式,通过灯操作数据集来指定发光强度。因此,例如灯的光源 可以单独地操作,从而可以输出不同发光强度的光。由此可以产生例如针对其他道路使用 者(例如行人)的警告信号。 根据实施例的另一形式,通过灯操作数据集指定灯序列。例如单独可操作的灯的 光源可以以预定的时间顺序单独地和/或成组地激活。此类时变灯序列可以特别容易地被 其他道路使用者(例如行人)感知。 根据实施例的另一形式,通过灯操作数据集指定光照方向。例如单独可操作的灯 的光源可以以预定的时间顺序单独地和/或成组地激活。各个光源在这里可以具有不同的 方向,即它们沿不同的方向发射光。因此,例如在朝着所检测的道路使用者(例如行人)的方 向发射光时,可以考虑所检测的道路使用者(例如行人)的位置。因此可以进一步改善可感 知性。 根据实施例的另一形式,通过灯操作数据集指定光照颜色。例如单独可操作的灯 的光源可以单独和/或成组设置在有色透镜的后面(沿光传播的方向),而其他可操作光源 则位于未着色的透镜的后面。可以通过激活有色透镜后面的可操作光源来更改光照颜色。 因此,可以再次提高可感知性。 一种计算机程序、控制设备以及具有这种控制设备的机动车辆也属于本发明。 附图说明 现在将参考附图说明本发明。此处: 图1示出了机动车辆的前视图的示意图; 图2示出了具有另外的道路使用者的交通场景的示意图; 图3示出了具有另一道路使用者的另一交通场景的示意图; 图4示出了图1所示的机动车辆的灯的示意图; 图5示出了用于图1至图3所示的机动车辆的操作的过程流程的示意图。











