
技术摘要:
本发明一种适用于全构型的空间机械臂运动学参数在轨标定方法,采用修正的DH建模方法,更适合于描述机械臂运动学参数偏差对末端位姿的影响,可应用于具有各种几何构型的机械臂,减小了机械臂相邻关节平行对机械臂运动学参数标定矩阵的影响,大大降低了标定结果出现病态 全部
背景技术:
在发射前,空间机械臂的运动学参数会采用精密设备进行标定。但是,在发射过程 中,机械臂会受到很大的冲击和过载;入轨后,由于所受重力很小,又会造成应力释放。这些 因素都会导致空间机械臂的运动学参数发生变化。为确保空间操作任务的成功完成,必须 对空间机械臂的运动学参数进行在轨标定。然而,对空间机械臂运动学参数进行在轨标定 面临很多困难挑战,体现在以下两方面: (1)对空间机械臂末端位姿缺少有效的在轨测量手段; (2)基于常规DH方法对机械臂进行运动学参数标定时,若机械臂相邻两个关节的 轴线近乎平行,由于它们之间的公垂线难以定义,将会使标定矩阵出现病态现象,导致无法 获得理想标定结果。
技术实现要素:
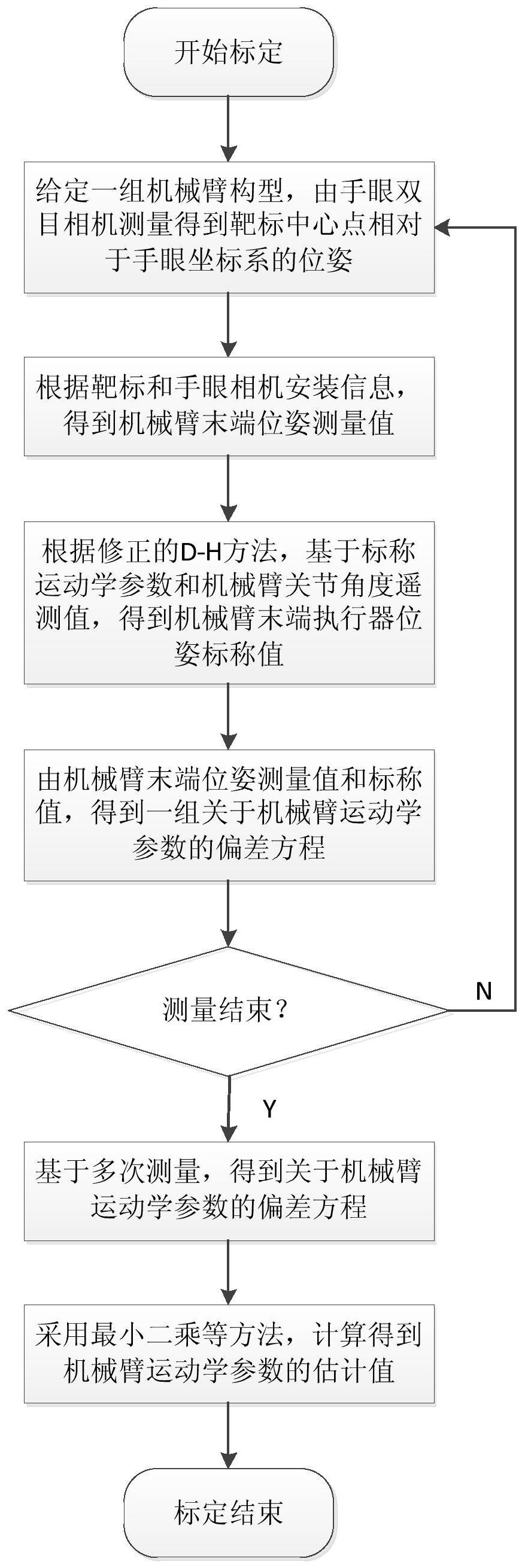
本发明的目的在于克服现有技术的不足,提供一种适用于全构型的空间机械臂运 动学参数在轨标定方法,解决了机械臂相邻关节平行情况下的运动学参数标定病态问题, 保证了求解的精度和可靠性。 本发明目的通过如下技术方案予以实现: 提供一种适用于全构型的空间机械臂运动学参数在轨标定方法,包括如下步骤: (1)机械臂安装基板上安装靶标,对于给定的一组机械臂构型,由机械臂末端安装 的手眼双目相机测量得到靶标中心点坐标系相对于手眼坐标系的位姿; (2)根据靶标和手眼相机的安装矩阵,得出机械臂末端在基座坐标系中的位姿测 量值; (3)基于空间机械臂标称运动学参数和关节角度遥测值,由正运动学计算得到末 端执行器在机械臂基座坐标系的位姿标称值; (4)由空间机械臂末端位姿的测量值和标称值,得到一组关于机械臂运动学参数 的偏差方程; (5)如果得到l组关于机械臂运动学参数的偏差方程,则进入步骤(6),否则更换一 组机械臂构型,返回步骤(1);l满足6l>>5n,n为机械臂的自由度; (6)求解l组偏差方程得到机械臂运动学参数误差,再根据运动学参数误差计算出 更为准确的运动学参数估计值,完成空间机械臂运动学参数标定。 优选的,步骤(1)中由机械臂末端安装的手眼双目相机测量得到靶标中心点坐标 系相对于手眼坐标系的位姿的具体方法为:设机械臂当前构型为θ=[θ1 … θ Tn] ,手眼双目 相机测量得到靶标中心点坐标系相对于手眼坐标系的位姿由齐次变换矩阵camT 4×4blank∈R 5 CN 111590566 A 说 明 书 2/7 页 给出。 优选的,步骤(2)中根据靶标和手眼相机的安装矩阵,得出机械臂末端在基座坐标 系中的位姿测量值的具体方法为: 机械臂末端在基座坐标系中的标称位姿0T ∈R4×4为0T =0T ·(endend end blank Tcam· camT Tblank) 0Tend可写为如下形式 其中,0R 3×3end∈R 为机械臂末端在基座坐标系中的标称姿态矩阵,0p 3×1end∈R 为机 械臂末端坐标系原点在基座系中的位置坐标;endTcam∈R4×4为手眼相机坐标系相对于机械臂 末端系的安装矩阵; 将机械臂末端在基座坐标系中的标称姿态的最小表示记为φ∈R3×1,由三个角度 表示,具体形式为: 根据姿态矩阵0Rend,得到对应某种转序的欧拉角表示 ψ; 机械臂末端在基座坐标系中的位姿测量值x 6×1m∈R 为 优选的,步骤(3)中采用空间机械臂标称运动学参数和关节角度遥测值,由正运动 学计算得到末端执行器在机械臂基座坐标系的位姿标称值的具体方法为: 令a=[a1 … an]T,α=[α1 … α Tn] ,d=[d … d T T1 n] ,θ=[θ1 … θn] ,β=[β1 … βn]T表示n自由度机械臂的修正DH参数,其中a、α、d、θ分别表示机械臂关节杆件长度、杆件扭 角、相邻关节距离、相邻关节转角,β为两个相邻关节的平行度; 根据机械臂正运动学,机械臂末端在基座系中的位姿标称值x ∈R6×1nom 为: xnom=k(anom,αnom,dnom,θnom,βnom) 其中,机械臂正运动学函数k(·)给出了从机械臂关节空间到任务空间的映射, anom,αnom,dnom,θnom,βnom分别表示机械臂修正DH参数a,α,d,θ,β的标称值。 优选的,步骤(4)中由空间机械臂末端位姿的测量值和标称值,得到一组关于机械 臂运动学参数的偏差方程的具体方法为: 机械臂末端位姿偏差Δx=xm-xnom,采用一阶近似得到 其中,Δa,Δα,Δd,Δθ,Δβ表示机械臂DH参数真实值与标称值的偏差; 表示机械臂正运动学函 数k(·)对该DH参数的偏微分,为参数空间与工作空间之间的雅克比变换; 6 CN 111590566 A 说 明 书 3/7 页 将机械臂修正DH参数写为矢量形式 ζ=[aT αT dT θT βT]T 令ζ ∈R5n×1 5n×1true 、ζnom∈R 分别表示机械臂修正DH参数的真实值与标称值,则机械 臂修正DH参数偏差Δζ∈R5n×1为 Δζ=ζtrue-ζnom 定义机械臂运动学标定矩阵Φ∈R6×5n如下 该标定矩阵可由机械臂修正DH参数标称值ζnom计算得出; 机械臂末端位姿偏差的矩阵形式为:Δx=Φ·Δζ。 优选的,求解l组偏差方程获得机械臂运动学参数误差的方法为采用最小二乘法 迭代求解。 优选的,最小二乘法迭代求解的终止条件为,两次迭代得到的Δζ之差的绝对值小 于设定阈值。 优选的,获得机械臂运动学参数误差后,计算得到机械臂运动学参数的估计值,具 体方法为: 求解 获得Δζ,机械臂运动学参数的估计值为 ζ′=ζnom Δζ。 优选的,机械臂构型满足:将矩阵 进行奇异值分解,在手眼相机能够清晰看到靶 标的前提下,选用矩阵 的最小奇异值作为度量指标,选择最小奇异值高于设定阈值的机 械臂构型。 优选的,机械臂安装基板上装两个圆形测量靶标,分别位于安装基板的两侧,且关 于机械臂在安装基板上的锁紧构型对称设置,两个圆形测量靶标的中心点距离大于手眼双 目相机光心之间的距离。 本发明与现有技术相比具有如下优点: (1)本发明采用了修正的DH建模方法,更适合于描述机械臂运动学参数偏差对末 端位姿的影响,可应用于各种几何构型的机械臂,降低了机械臂相邻关节平行对标定矩阵 的影响,大大降低了标定结果出现病态的概率,保证了求解的精度和可靠性。 (2)本发明以空间机械臂上通常配备的手眼双目相机作为测量工具,无需额外增 加测量设备,标定成本低。通过在机械臂安装面合理放置靶标,即可实现机械臂末端位姿测 量,方法简单可靠。 (3)本发明设定机械臂构型的判断准则,提升了标定结果的一致性和可靠性。 附图说明 图1为本发明的方法流程示意图; 7 CN 111590566 A 说 明 书 4/7 页 图2为机械臂修正DH参数示意图。











