
技术摘要:
本公开是关于一种建立二维地图的方法和装置,属于导航技术领域。所述方法包括:获取目标区域的三维点云模型;确定目标区域中的地面在三维点云模型中对应的地面平面,确定目标区域中的障碍物在三维点云模型中对应的模型点;将模型点在地面平面中对应的投影区域,确定为 全部
背景技术:
在自主导航领域中,可移动设备可以依靠自身安装的激光雷达在目标区域中进行 自主导航。在进行自主导航之前需要对目标区域进行建图,得到目标区域的二维地图。其 中,二维地图中标注有目标区域中的各障碍物对应的位置范围。在得到二维地图之后,可移 动设备才能基于二维地图规划从当前位置移动至目标位置的行进路线,再沿着行进路线移 动至目标位置。 在对目标区域进行建图的过程中,首先可移动设备可以在目标区域内行进,在行 进的过程中,通过激光雷达扫描目标区域,基于扫描结果建立二维地图。由于激光雷达可以 扫描的俯仰角度有限,只能扫描高度和激光雷达的安装高度相同或者相近的障碍物。因此, 如果任一障碍物的高度比激光雷达的安装高度低了很多,激光雷达就不能扫描到该障碍 物。进而,基于扫描结果建立的二维地图中,缺少该障碍物的位置范围,二维地图的准确性 较低。
技术实现要素:
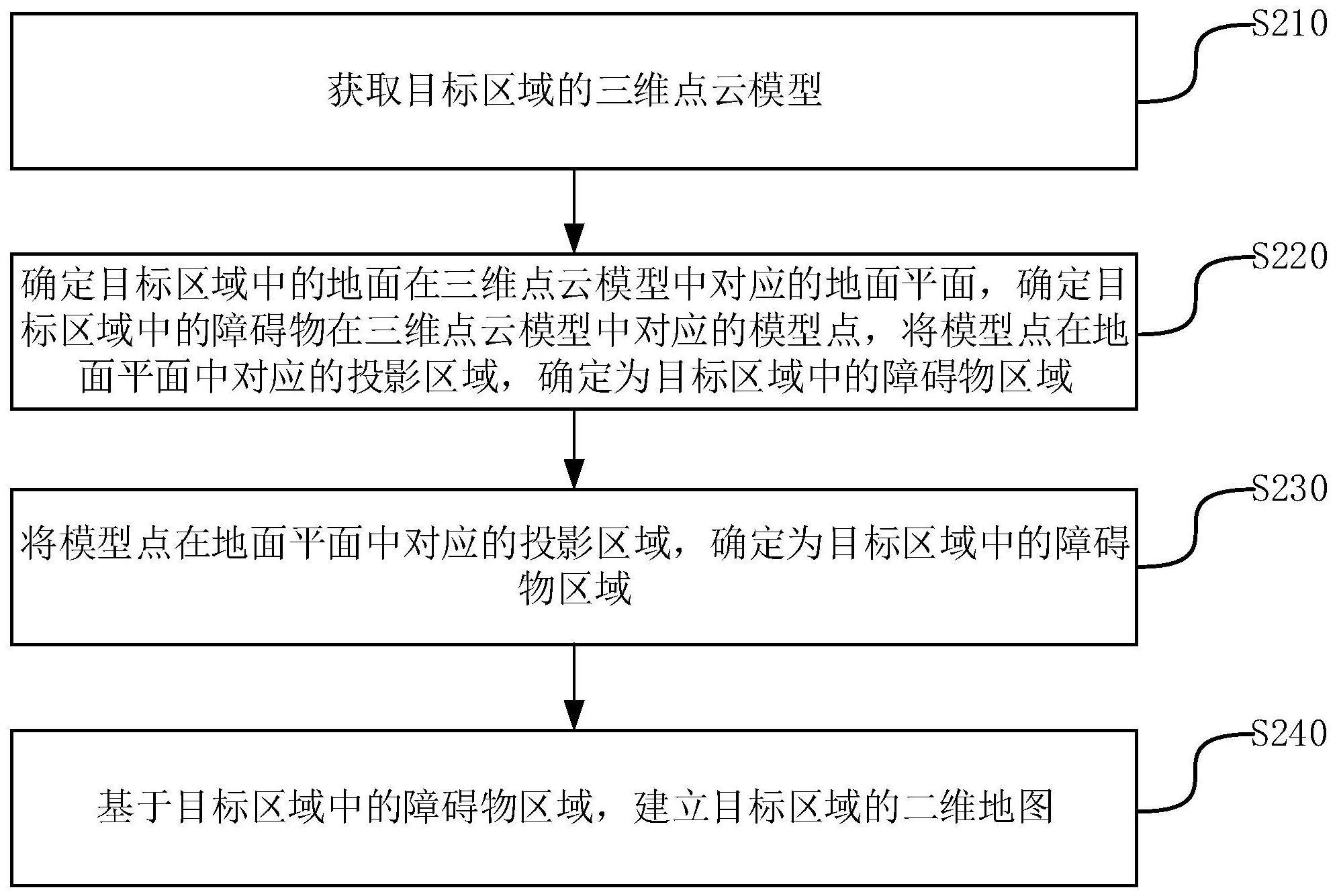
为了克服相关技术中存在的问题,本公开提供了以下技术方案: 根据本公开实施例的第一方面,提供一种建立二维地图的方法,所述方法包括: 获取目标区域的三维点云模型; 确定所述目标区域中的地面在所述三维点云模型中对应的地面平面,确定所述目 标区域中的障碍物在所述三维点云模型中对应的模型点; 将所述模型点在所述地面平面中对应的投影区域,确定为所述目标区域中的障碍 物区域; 基于所述目标区域中的障碍物区域,建立所述目标区域的二维地图。 可选地,所述确定所述目标区域中的地面在所述三维点云模型中对应的地面平 面,包括: 确定预先存储的可移动设备的高度; 沿水平方向,将所述三维点云模型中低于所述可移动设备的高度的部分,切分成 多个高度相同的三维点云切片模型; 确定每个三维点云切片模型实际包含的点的数量占所述三维点云切片模型能够 容纳的点的数量的比值; 在所述多个三维点云切片模型中,确定比值大于预设比值阈值的目标三维点云切 片模型; 将所述目标三维点云切片模型中高度最低的平面在所述三维点云模型中对应的 平面,确定为所述目标区域中的地面在所述三维点云模型中对应的地面平面。 5 CN 111735433 A 说 明 书 2/10 页 可选地,所述确定所述目标区域中的障碍物在所述三维点云模型中对应的模型 点,包括: 将所述多个三维点云切片模型中除所述目标三维点云切片模型之外的三维点云 切片模型中包括的模型点,确定为所述目标区域中的障碍物在所述三维点云模型中对应的 模型点。 可选地,所述将所述模型点在所述地面平面中对应的投影区域,确定为所述目标 区域中的障碍物区域,包括: 确定每个所述模型点与所述地面平面之间的垂线的垂足; 将所述垂足在所述地面平面中组成的投影区域,确定为所述目标区域中的障碍物 区域。 可选地,所述方法还包括: 确定初始位置和目标位置,基于所述目标区域的二维地图,确定从所述初始位置 移动至所述目标位置的第一行进路线; 基于所述第一行进路线,向所述目标位置行进。 可选地,所述方法还包括: 在向所述目标位置行进的过程中,每当达到预设周期时,获取所述可移动设备当 前所处局部区域的三维点云模型,确定所述局部区域中的地面在所述局部区域的三维点云 模型中对应的地面平面,确定所述局部区域中的障碍物在所述局部区域的三维点云模型中 对应的局部区域模型点,将所述局部区域模型点在所述局部区域的三维点云模型中对应的 地面平面中对应的投影区域,确定为所述局部区域中的障碍物区域,基于所述局部区域中 的障碍物区域,建立所述局部区域的二维地图; 基于当前的位姿,将所述局部区域的二维地图叠加到所述目标区域的二维地图 上,确定叠加后的目标区域的二维地图; 基于所述叠加后的目标区域的二维地图,确定从当前位置移动至所述目标位置的 第二行进路线。 根据本公开实施例的第二方面,提供一种建立二维地图的装置,所述装置包括: 获取模块,用于获取目标区域的三维点云模型; 确定模块,用于确定所述目标区域中的地面在所述三维点云模型中对应的地面平 面,确定所述目标区域中的障碍物在所述三维点云模型中对应的模型点;将所述模型点在 所述地面平面中对应的投影区域,确定为所述目标区域中的障碍物区域; 建图模块,用于基于所述目标区域中的障碍物区域,建立所述目标区域的二维地 图。 可选地,所述确定模块,用于: 确定预先存储的可移动设备的高度; 沿水平方向,将所述三维点云模型中低于所述可移动设备的高度的部分,切分成 多个高度相同的三维点云切片模型; 确定每个三维点云切片模型实际包含的点的数量占所述三维点云切片模型能够 容纳的点的数量的比值; 在所述多个三维点云切片模型中,确定比值大于预设比值阈值的目标三维点云切 6 CN 111735433 A 说 明 书 3/10 页 片模型; 将所述目标三维点云切片模型中高度最低的平面在所述三维点云模型中对应的 平面,确定为所述目标区域中的地面在所述三维点云模型中对应的地面平面。 可选地,所述确定模块,用于: 将所述多个三维点云切片模型中除所述目标三维点云切片模型之外的三维点云 切片模型中包括的模型点,确定为所述目标区域中的障碍物在所述三维点云模型中对应的 模型点。 可选地,所述确定模块,用于: 确定每个所述模型点与所述地面平面之间的垂线的垂足; 将所述垂足在所述地面平面中组成的投影区域,确定为所述目标区域中的障碍物 区域。 可选地,所述确定模块,还用于确定初始位置和目标位置,基于所述目标区域的二 维地图,确定从所述初始位置移动至所述目标位置的第一行进路线; 所述装置还包括: 行进模块,用于基于所述第一行进路线,向所述目标位置行进。 可选地,所述建图模块,还用于在向所述目标位置行进的过程中,每当达到预设周 期时,获取所述可移动设备当前所处局部区域的三维点云模型,确定所述局部区域中的地 面在所述局部区域的三维点云模型中对应的地面平面,确定所述局部区域中的障碍物在所 述局部区域的三维点云模型中对应的局部区域模型点,将所述局部区域模型点在所述局部 区域的三维点云模型中对应的地面平面中对应的投影区域,确定为所述局部区域中的障碍 物区域,基于所述局部区域中的障碍物区域,建立所述局部区域的二维地图; 所述确定模块,还用于基于当前的位姿,将所述局部区域的二维地图叠加到所述 目标区域的二维地图上,确定叠加后的目标区域的二维地图;基于所述叠加后的目标区域 的二维地图,确定从当前位置移动至所述目标位置的第二行进路线。 根据本公开实施例的第三方面,提供一种计算机设备,所述计算机设备包括处理 器、通信接口、存储器和通信总线,其中: 所述处理器、所述通信接口和所述存储器通过所述通信总线完成相互间的通信; 所述存储器,用于存放计算机程序; 所述处理器,用于执行所述存储器上所存放的程序,以实现上述建立二维地图的 方法。 根据本公开实施例的第四方面,提供一种计算机可读存储介质,所述计算机可读 存储介质内存储有计算机程序,所述计算机程序被处理器执行时实现上述建立二维地图的 方法。 根据本公开实施例的第五方面,提供一种导航系统,所述导航系统包括可移动设 备和服务器,所述可移动设备包括多个图像拍摄部件,其中: 所述可移动设备,用于通过所述多个图像拍摄部件拍摄目标区域的环境图像,将 所述目标区域的环境图像发送至所述服务器; 所述服务器,用于接收所述目标区域的环境图像,基于所述目标区域的环境图像, 建立所述目标区域的三维点云模型;确定所述目标区域中的地面在所述三维点云模型中对 7 CN 111735433 A 说 明 书 4/10 页 应的地面平面,确定所述目标区域中的障碍物在所述三维点云模型中对应的模型点;将所 述模型点在所述地面平面中对应的投影区域,确定为所述目标区域中的障碍物区域;基于 所述目标区域中的障碍物区域,建立所述目标区域的二维地图。 本公开的实施例提供的技术方案可以包括以下有益效果: 通过本公开实施例提供的方法,可以通过环境图像建立三维点云模型,基于三维 点云模型,建立标注有障碍物对应的区域的二维地图。由于图像拍摄部件可以拍摄到各个 高度的障碍物,并计算障碍物在实际中的高度和相对于可移动设备的距离,因此这样建立 的目标区域的二维地图包含的障碍物的信息更加全面,不容易缺少某些障碍物的信息。通 过本公开实施例提供的方法建立的二维地图的准确性更高。 应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不 能限制本公开。 附图说明 此处的附图被并入说明书中并构成本说明书的一部分,示出了符合本公开的实施 例,并与说明书一起用于解释本公开的原理。在附图中: 图1是根据一示例性实施例示出的一种建立二维地图的方法的流程示意图; 图2是根据一示例性实施例示出的一种建立二维地图的方法的流程示意图; 图3是根据一示例性实施例示出的一种建立二维地图的方法的流程示意图; 图4是根据一示例性实施例示出的一种二维地图的示意图; 图5是根据一示例性实施例示出的一种建立二维地图的装置的结构示意图; 图6是根据一示例性实施例示出的一种计算机设备的结构示意图。 通过上述附图,已示出本公开明确的实施例,后文中将有更详细的描述。这些附图 和文字描述并不是为了通过任何方式限制本公开构思的范围,而是通过参考特定实施例为 本领域技术人员说明本公开的概念。











