
技术摘要:
本发明公开了一种机器人躯体结构,包括:头部组件、躯体组件、两上肢组件和两下肢组件,所述头部组件设于所述躯体组件的上端,两所述上肢组件分别设于所述躯体组件的上部的两侧,两所述下肢组件分别设于所述躯体组件的下部的两侧;其中,所述躯体组件包括:躯体主体、 全部
背景技术:
机器人是一种可编程和多功能的,用来搬运材料、零件、工具的操作机,或是为了 执行不同的任务而具有可改变和可编程动作的专门系统。随着技术的不断发展和应用领域 的扩大,人们期望智能机器人在更多领域为人类服务,代替人类完成更复杂的工作。 在现有技术中,科研人员往往针对机器人的各机械臂进行研发和升级,通过增设 传动轴结构来提高机器人的可操作性和灵活性,但仍存在着,没有一种能够让机器人在站 立姿态与爬行姿态可稳定根据使用者的需求进行切换的机器人躯体结构
技术实现要素:
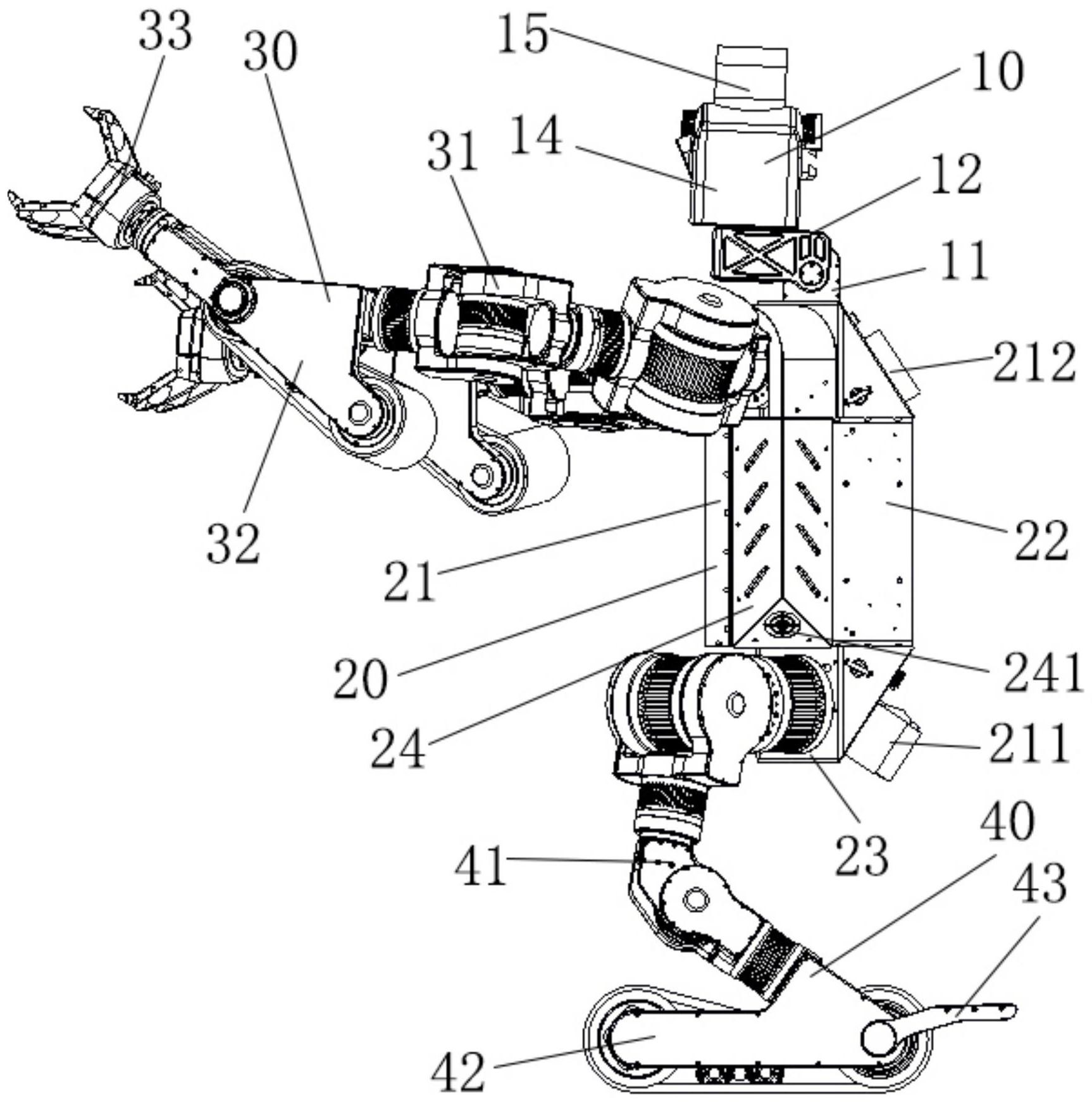
有鉴于此,为解决上述机器人不能很好地进行站立和爬行的姿态转换的问题,本 发明的目的在于提供一种机器人躯体结构及其形态转换方法,进一步提高机器人进行形态 装换过程中的稳定性。 具体技术方案如下: 一种机器人躯体结构,包括:头部组件、躯体组件、两上肢组件和两下肢组件,所述 头部组件设于所述躯体组件的上端,两所述上肢组件分别设于所述躯体组件的上部的两 侧,两所述下肢组件分别设于所述躯体组件的下部的两侧; 其中,所述躯体组件包括:躯体主体、壳形护罩、第一安装模块和两第二安装模块, 所述躯体主体呈中空结构,所述躯体主体内内安装有机器人控制单元,所述第一安装模块 安装于所述躯体主体的下端,所述第一安装模块呈三棱柱结构,所述第一安装模块的上端 与所述躯体主体的下端固定连接,且所述第一安装模块的一侧面与所述躯体主体的一侧面 平行设置,所述第一安装模块的另外两侧面分别安装有一所述下肢组件,所述壳形护罩可 拆卸地安装于所述躯体主体的一侧,所述壳形护罩的中部向远离所述躯体主体的一侧拱起 设置,所述壳形护罩的上端覆盖于所述躯体主体的一侧的上端,所述壳形护罩的下端覆盖 于所述躯体主体的一侧的下端,两所述第二安装模块固定设于所述躯体主体靠近所述壳形 护罩的两侧,每一所述第二安装模块均沿竖直方向设置,每一所述第二安装模块均呈三棱 柱结构,每一所述第二安装模块的一侧面均沿所述躯体主体的表面设置,每一所述第二安 装模块的另一侧面的上端均设有一所述上肢组件。 在另一个优选的实施例中,所述头部组件包括:安装座、支撑旋转件、视觉组件和 头部主体,所述安装座的下端固定安装于所述躯体主体的上端,且所述安装座的上端呈弧 形设置,所述支撑旋转件的一端的下部开设有一旋转槽,所述旋转槽与所述安装座的上端 相匹配,所述支撑旋转件的一端可转动地安装于所述安装座的上端,所述支撑旋转件的另 一端的上部安装有一转轴,所述头部主体通过所述转轴可转动安装于所述支撑旋转件的另 一端,所述视觉组件安装于所述头部主体的一侧。 5 CN 111590545 A 说 明 书 2/6 页 在另一个优选的实施例中,所述头部组件还包括:探照装置,所述探照装置安装于 所述头部主体的上表面。 在另一个优选的实施例中,两所述上肢组件均包括:机械上臂、第一履带组件和三 指机械爪,所述机械上臂的一端安装于一所述第二安装模块上,所述机械上臂的另一端安 装于所述第一履带组件的中部的一侧,所述三指机械爪安装于所述第一履带组件远离所述 机械上臂的一端。 在另一个优选的实施例中,两所述下肢组件均包括:机械下臂、第二履带组件和挡 泥板,所述机械下臂的上端安装于所述第一安装模块上,所述第二履带组件沿水平方向设 置,所述机械下臂安装于所述第二履带组件的中部的上端,所述挡泥板设于所述第二履带 组件的一端。 在另一个优选的实施例中,所述壳形护罩的下端开设有一第一凹槽,所述第一凹 槽上可打开地设有一第一护板,所述第一凹槽内设有一电源连接组件,所述电源连接组件 通过一电缆与外部电源连接。 在另一个优选的实施例中,所述壳形护罩的上端开设有一第二凹槽,所述第二凹 槽上可打开地设有一第二护板,所述第二凹槽内设有一紧急控制开关。 在另一个优选的实施例中,两所述第二安装模块的下端均开设有一散热口,所述 散热口与所述躯体主体的内部连通。 在另一个优选的实施例中,所述躯体主体相对于所述壳形护罩的另一侧的表面开 设有一维护窗口,所述维护窗口与所述躯体主体的内部相连通,所述维护窗口上可打开地 设有一第三护板,所述第三护板的外侧设有密码输入组件,所述第三护板的内侧设有密码 锁芯,所述维护窗口的内侧设有一密码锁座,所述密码锁芯与所述密码锁座相匹配。 一种机器人躯体结构的形态转换方法,其中,包括上述任意一项所述的机器人躯 体结构,还包括:控制平台、两第一速度传感器、两第二速度传感器、一陀螺仪传感器和两红 外测距传感器,两所述第一速度传感器分别安装于两所述第一履带组件内,两所述第一速 度传感器分别用于检测两第一履带组件的运行速度,两所述第二速度传感器分别安装于两 所述第二履带组件内,两所述第二速度传感器分别用于检测两第二履带组件速度,两所述 红外测距传感器分别安装于两第一履带组件的一侧,且每一所述红外测距传感器的测距方 向均与一所述履带组件的设置方向,所述陀螺仪传感器安装于所述躯体主体的内部,两所 述第一速度传感器、两所述第二速度传感器、一所述陀螺仪传感器和两红外测距传感器均 与所述机器人控制单元通信连接,所述控制平台用于远端无线控制上述的机器人躯体结 构; 所述形态转换方法包括: 步骤S1:控制人员对上述的机器人躯体结构的运行参数进行初始设定,将运行参 数保存在所述机器人控制单元,并启动上述的机器人躯体结构; 步骤S2:所述机器人控制单元通过所述陀螺仪传感器持续检测上述的机器人躯体 结构是否处于平稳状态, 若是,进入步骤S3; 若否,进入步骤S4; 步骤S3,所述控制平台显示“可以进行形态转换”; 6 CN 111590545 A 说 明 书 3/6 页 步骤S4,所述控制平台显示“不可进行形态转换”,并返回步骤S2; 步骤S5,控制人员通过所述控制平台发送“形态变换”指令; 步骤S6,所述机器人控制单元控制两所述机械下臂进行弯曲,同时控制两所述机 械上臂,使两第一履带组件处于水平方向; 步骤S7,所述机器人控制单元通过两所述第二速度传感器监测两所述第二履带组 件的运行速度v1是否为0, 若是,进入步骤S8; 若否,进入步骤S9; 步骤S8,所述机器人控制单元控制两所述机械上臂进行下落动作且保持两所述第 一履带组件保持水平方向,并通过两所述红外测距传感器实时监测两所述第一履带组件与 地面的距离h1和h2是否均为0; 若是,进入步骤S11; 若否,进入步骤S10; 步骤S9,机器人控制单元控制两所述第一履带组件进行运行,并通过两所述第一 速度传感器监测两所述第一履带组件的运行速度v2,控制运行速度v2与运行速度v1相等, 并返回步骤S8; 步骤S10,所述机器人控制单元继续控制两所述机械上臂分别进行对应的下落动 作,返回步骤S8 步骤S11,所述控制平台显示“完成形态转换”。 本发明由于采用了上述技术方案,使之与现有技术相比具有的积极效果是:通过 对本发明的应用,进一步提升了机器人躯体结构的稳定性,使机器人躯体结构可进行稳定 地形态转换。 附图说明 图1为本发明的一种机器人躯体结构的主视图; 图2为本发明的一种机器人躯体结构的侧视图; 图3为本发明的一种机器人躯体结构的自控方法的形态转换方法框图。 附图中: 10、头部组件;20、躯体组件;30、上肢组件;40、下肢组件;21、躯体主体;22、壳形护 罩;23、第一安装模块;24、第二安装模块;11、安装座;12、支撑旋转件;13、视觉组件;14、头 部主体;15、探照装置;31、机械上臂;32、第一履带组件;33、三指机械爪;41、机械下臂;42、 第二履带组件;43、挡泥板;211、第一护板;212、第二护板;241、散热口;213、维护窗口;214、 密码锁座。











