
技术摘要:
本发明提供一种仿人柔性手臂共振抑制方法,具体提供一种基于PR控制器的仿人柔性手臂共振抑制方法,属于振动控制领域。仿人柔性手臂关节电机端输出轴和手臂连杆固定端由谐波减速器连接,谐波减速器柔轮的固有柔性,引入共振频率点,引发仿人机器人手臂产生共振问题,本 全部
背景技术:
与传统的刚性机械臂相比,仿人柔性手臂采用谐波减速器作为手臂的传动部件, 既可以获得高的负载自重比,又使得手臂关节具备柔性,增加了手臂发生碰撞时的缓冲作 用,减小对手臂结构的损坏,然而,由于谐波减速器固有柔性引入系统共振频率点,当驱动 系统的频率与仿人柔性手臂谐振频率相等时,激发手臂共振,严重影响柔性手臂的操作性 能及使用寿命。通常情况下对共振的抑制主要是陷波滤波器法,但是陷波滤波器的通带范 围过宽会导致较大的相角滞后,而采用窄通带又导致谐振频率辨识影响加剧,抑制共振效 果一般。因此,有必要采取有效的措施对仿人柔性手臂的共振现象进行抑制。
技术实现要素:
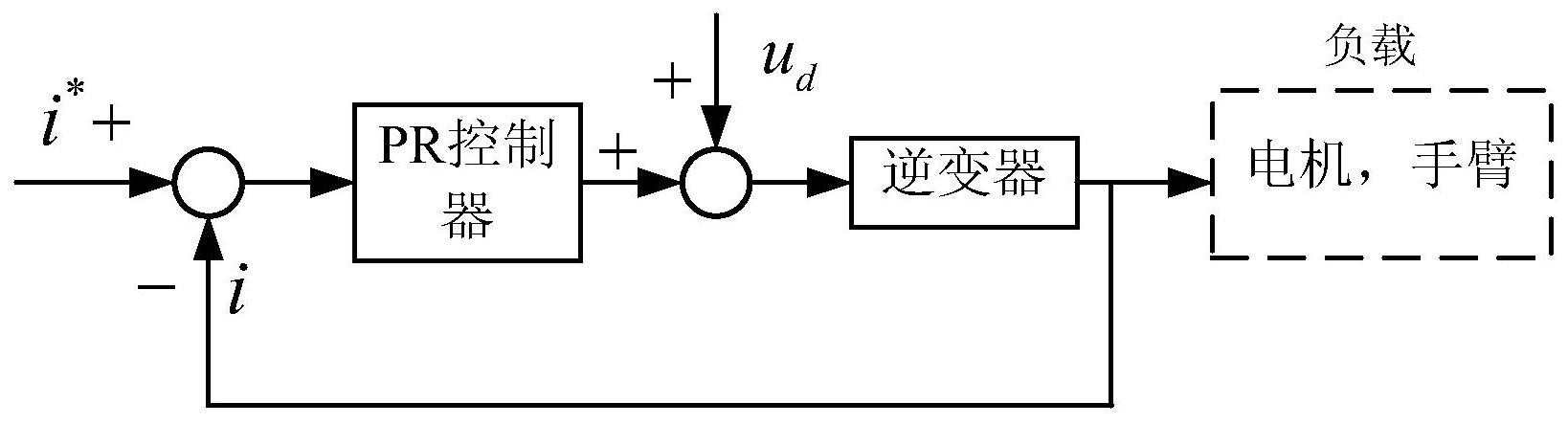
针对上述现有技术中存在的缺陷,本发明提供一种基于PR控制器的共振抑制方 法,解决仿人柔性手臂存在的共振问题。本发明基于PR控制器在特定频率点处的扰动抑制 能力,避免逆变器输出信号频率等于手臂谐振频率引起自激振荡。其技术内容包括: 一种仿人柔性手臂共振抑制方法,具体提供一种基于PR控制器的仿人柔性手臂共 振抑制方法;其特征在于: 所述基于PR控制器的仿人柔性手臂共振抑制方法,当PR控制器谐振频率ω0设置 为手臂系统谐振频率ωNTF时,逆变器输出电流信号与干扰量传递函数表示为: 其中,Gc(s)为PR控制器传递函数,Ginv(s)为逆变器传递函数;i为逆变器输出电流 信号;ud为控制器电流闭环扰动信号,将驱动电机与手臂连杆均等效为驱动系统负载,控制 器电流闭环扰动量ud为手臂运动状态变化引起的驱动电机电压波动。 PR控制器传递函数Gc(s)表示为: 其中,Kp为比例增益系数,Ki为积分增益系数,ω0表示谐振频率。 ωNTF为手臂系统谐振频率,由仿人柔性手臂动力学模型可以得出: 其中,Jm、Ja分别为电机和手臂转动惯量,K为弹簧弹性系数。 当控制器输出信号频率与手臂谐振频率相等时,手臂产生共振, 表 3 CN 111590579 A 说 明 书 2/4 页 明引入PR控制器后,逆变器输出电流不受手臂在谐振频率ωNTF处振动状态的影响,避免逆 变器输出信号频率等于手臂谐振频率引起的自激振荡。 该发明有益之处在于,本发明提出了一种基于PR控制器的仿人柔性手臂共振抑制 方法,PR控制器针对特定频率点下的扰动有较强的抑制能力,避免逆变器输出信号频率等 于手臂谐振频率引起自激振荡,且不改变其他频率点处的动态特性,控制过程易于实现。 附图说明 图1是基于PR控制器的仿人柔性手臂系统框图; 图2是PR控制器的传递函数框图; 图3是引入PR控制器后手臂驱动系统电流闭环。











