
技术摘要:
本发明公开了一种机器人平台的自主巡线方法、装置及存储介质。所述方法包括:获取机器人巡线场景的地面俯视图,并检测出所述地面俯视图中的所有线段;从所述所有线段中筛选得到满足预设线段角度、能量值及距离参数要求的所述机器人的初始车道线,并控制所述机器人沿所 全部
背景技术:
随着机器人技术的日趋成熟,机器人的应用场景也越来越广泛,例如:军事上的侦 查监视、服务消费上的无人驾驶、送餐机器人、消防、环境检测、电力巡检等。由于机器人在 各个领域发挥着越来越重要的作用,大众对机器人的智能化需求也越来越高。 近年来,机器人自主巡线功能成为了研究的热点。现有的机器人自主巡线算法主 要包括基于深度学习的巡线算法和基于传统视觉的巡线算法。基于深度学习的巡线算法需 要大量不同场景的人工标注好的训练数据以及高性能的gpu,因此场景泛化性较差,且对设 备硬件要求高。基于传统视觉的巡线算法在常用的cpu上就能达到实时的处理速度,且具有 精度高,成本低,部署到嵌入式设备方便等特点。然而,本发明的发明人研究发现,现有的基 于传统视觉的巡线算法仍存在车道线检测精度低、无法识别任意角度的折线等不足。
技术实现要素:
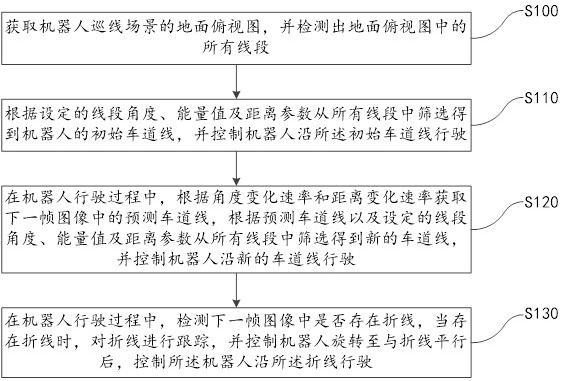
本发明提供了一种机器人平台的自主巡线方法、装置及存储介质,能够在一定程 度上解决现有机器人巡线算法存在的车道线检测精度低、无法识别任意角度的折线等不 足。 为解决上述技术问题,本发明采用的技术方案为: 一种机器人平台的自主巡线方法,包括以下步骤: 获取机器人巡线场景的地面俯视图,并检测出所述地面俯视图中的所有线段; 从所述所有线段中筛选得到满足预设线段角度、能量值及距离参数要求的初始车道 线,并控制所述机器人沿所述初始车道线行驶; 在机器人行驶过程中,获取下一帧图像中满足预设角度变化速率和距离变化速率要求 的预测车道线,根据所述预测车道线以及设定的线段角度、能量值及距离参数从所述所有 线段中筛选得到新的车道线,并控制所述机器人沿所述新的车道线行驶。 本发明采用的技术方案还包括:在机器人行驶过程中,检测下一帧图像中是否存 在折线,当存在折线时,对所述折线进行跟踪,并控制所述机器人旋转至与所述折线平行 后,控制所述机器人沿所述折线行驶。 本发明采用的技术方案还包括:所述检测出所述地面俯视图中的所有线段包括: 将机器人巡线场景的当前帧图像转换为灰度图; 对所述灰度图进行高斯模糊处理; 利用透视变换矩阵对所述高斯模糊处理后的灰度图进行透视变换,得到对应的所述地 面俯视图; 对所述地面俯视图进行边缘检测 霍夫变换,得到所述地面俯视图中所有的线段。 5 CN 111598911 A 说 明 书 2/10 页 本发明采用的技术方案还包括:所述根据设定的线段角度、能量值及距离参数从 所述所有线段中筛选得到所述机器人的初始车道线包括: 从所述所有线段中筛选得到符合第一筛选规则的两条左右相邻的车道线段,将筛选得 到的两条车道线段形成的车道设定为机器人的初始车道线;所述第一筛选规则包括: 所述两条车道线段之间的角度差不能超过设定度数; 所述两条车道线段的能量值大于设定阈值,且左边车道线段的能量值为负,右边车道 线段的能量值为正; 所述两条车道线段之间的实际距离在车道线实际宽度范围内。 本发明采用的技术方案还包括:所述控制所述机器人沿所述初始车道线行驶包 括: 将所述初始车道线逆透视转换到图像坐标系,再由图像坐标系转换到相机坐标系; 计算所述左边车道线段和左边车道线段的四个顶点在相机坐标系下的位置,然后计算 所述机器人与初始车道线之间的距离和夹角; 根据所述距离和夹角计算结果控制所述机器人沿所述初始车道线行驶。 本发明采用的技术方案还包括:所述根据所述预测车道线以及设定的线段角度、 能量值及距离参数从所述所有线段中筛选得到新的车道线包括: 设定角度变化速率△θ为所述初始车道线前五帧的角度平均变化量; 设定距离变化速率△d为所述初始车道线前五帧在图像坐标系x轴方向移动的像素值 的平均值; 通过△θ和△d预测得到下一帧图像中车道线所在的位置,并定义此时的车道线为预测 车道线; 从所述俯视图所有线段中筛选出与所述预测车道线之间的角度差不超过设定度数、与 所述预测车道线的左边线段真实距离或右边线段真实距离不超过设定距离的车道线段,且 所述车道线段的能量值大于设定阈值; 定义所述预测车道线与所筛选的车道线段形成的车道线为新的车道线。 本发明采用的技术方案还包括:所述根据所述预测车道线以及设定的线段角度、 能量值及距离参数从所述所有线段中筛选得到新的车道线还包括: 如果在下一帧图像中没有跟踪到新的车道线,则判断连续设定帧数的图像中是否跟踪 到新的车道线; 如果判断连续设定帧数的图像中没有跟踪到新的车道线,则判定所述机器人已偏移车 道线,控制机器人停止运行。 本发明采用的技术方案还包括:所述通过折线检测模块检测下一帧图像中是否存 在折线包括: 在所述俯视图的所有线段中剔除掉与当前车道线夹角小于第二设定度数的线段,得到 折线候选线段; 从所述折线候选线段中选取符合第三筛选规则的两条线段,即为检测得到的折线;所 述第三筛选规则为: 所述两条线段之间的角度差小于第一设定度数; 所述两条线段之间的实际距离与当前车道线实际宽度之差小于设定值; 6 CN 111598911 A 说 明 书 3/10 页 所述两条线段的能量值与当前车道线的两条线段能量值之差小于设定阈值。 本发明采用的技术方案还包括:所述对所述折线进行跟踪包括: 计算所述机器人与所述折线之间的距离与夹角; 判断所述机器人与折线之间的距离是否在设定的距离范围内; 如果在设定的距离范围内,控制所述机器人停止行驶并原地旋转,当旋转至与所述折 线平行时,将所述折线更新为新的车道线。 本发明采用的另一技术方案为:一种机器人平台的自主巡线装置,所述装置包括: 线段检测模块:用于获取机器人巡线场景的地面俯视图,并检测出所述地面俯视图中 的所有线段; 初始车道线筛选模块:用于从所述所有线段中筛选得到满足预设线段角度、能量值及 距离参数要求的所述机器人的初始车道线,并控制所述机器人沿所述初始车道线行驶; 车道线跟踪模块:用于在机器人行驶过程中,获取下一帧图像中满足预设角度变化速 率和距离变化速率要求的预测车道线,根据所述预测车道线以及设定的线段角度、能量值 及距离参数从所述所有线段中筛选得到新的车道线,并控制所述机器人沿所述新的车道线 行驶。 为解决上述技术问题,本发明采用的再一个技术方案是:提供一种机器人平台的 自主巡线装置,包括处理器、与所述处理器耦接的存储器,其中, 所述存储器存储有用于实现权利上述的机器人平台的自主巡线方法的程序指令; 所述处理器用于执行所述存储器存储的所述程序指令以控制机器人自主巡线。 为解决上述技术问题,本发明采用的再一个技术方案是:一种存储介质,存储有处 理器可运行的程序指令,所述程序指令用于执行上述的机器人平台的自主巡线方法。 本发明的有益效果是: 一、在初始车道线选取和车道线跟踪过程中,添加了角度、能量,线段间的距离判别,同 时利用帧间信息进行车道线的选取和跟踪,得到的车道线角度精度高,误差小,提升了车道 线检测的准确率。 二、采用车道线跟踪,利用帧间信息筛选当前帧的候选车道线段,再通过距离、角 度、能量值进一步筛选车道线段并且补全得到新的车道线,能够提升机器人在车道线破损、 被遮挡、光照条件弱等环境下的鲁棒性。 三、在跟踪车道线的同时采用折线检测模块实时检测是否有折线存在,当检测到 折线时,对折线进行跟踪,当机器人与折线距离在设定范围内时,控制机器人停下并转弯至 与折线平行,然后控制机器人沿折线继续行驶;该方案能够识别任意角度的折线并沿着折 线转弯,提升机器人在复杂弯曲的路径上的巡线能力。 附图说明 图1是本发明第一实施例的机器人平台的自主巡线方法流程示意图; 图2是本发明第二实施例的机器人平台的自主巡线方法流程示意图; 图3a为本发明第二实施例中获取的原始当前帧图像; 图3b为本发明第二实施例中透视变换得到的地面俯视图; 图4为本发明第二实施例的线段能量值计算方式示意图; 7 CN 111598911 A 说 明 书 4/10 页 图5是本发明实施例的机器人平台的自主巡线装置第一结构示意图; 图6是本发明实施例的机器人平台的自主巡线装置第二结构示意图; 图7是本发明实施例的存储介质结构示意图。











