
技术摘要:
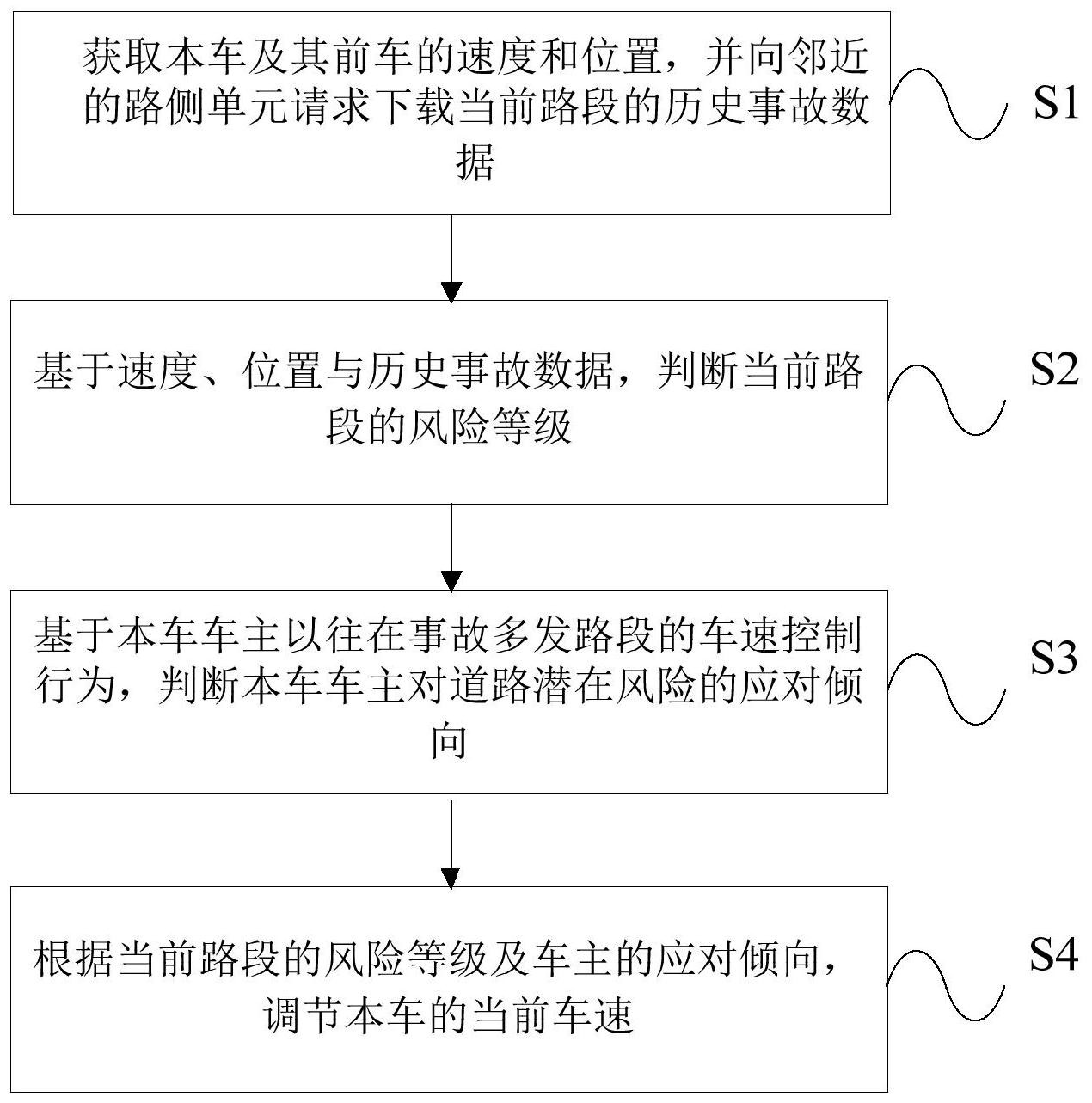
本发明涉及一种基于路侧单元的自动驾驶安全判别方法、设备、存储介质,其中方法包括:步骤S1.获取本车及其前车的速度和位置,并向邻近的路侧单元请求下载当前路段的历史事故数据;步骤S2.基于速度、位置与历史事故数据,判断当前路段的风险等级;步骤S3.基于本车车主以 全部
背景技术:
现有的自动驾驶车辆均设有由激光传感器、视觉传感器、位置传感器、前后雷达、 主控电脑所组成的自动驾驶系统,通过依赖视觉计算、雷达监控和全球定位系统协同合作, 让主控电脑能根据道路车辆之间的相对位置及速度,自动操控车辆进行行驶,并在自动驾 驶过程中,根据路段风险、前后车之间的相对位置及速度实时作出安全判别,进而调整车速 以保障自动驾驶安全。 现有方案存在的缺陷是,基于安全判别的车速调整仅考虑位置及速度参数,忽略 车主对道路潜在风险的应对意愿,存在违背车主驾驶习惯的可能,导致车主的自动驾驶体 验度不高。
技术实现要素:
本发明为解决或部分解决现有技术中的不足之处,而提供一种基于路侧单元的自 动驾驶安全判别方法、设备、存储介质。 为此,提供一种基于路侧单元的自动驾驶安全判别方法,所述路侧单元指等间距 排列于道路旁侧且与运营中心通信的多个网联通信设备,各网联通信设备之间相互通信且 分别与其通信范围内的各车辆组网,其特征在于,包括下述步骤: 步骤S1.获取本车及其前车的速度和位置,并向邻近的路侧单元请求下载当前路 段的历史事故数据; 步骤S2.基于速度、位置与历史事故数据,判断当前路段的风险等级; 步骤S3.基于本车车主以往在事故多发路段的车速控制行为,判断本车车主对道 路潜在风险的应对倾向; 步骤S4.根据当前路段的风险等级及车主的应对倾向,调节本车的当前车速。 作为优选方案,所述风险等级分为高中低三级,所述应对倾向具体指本车车主对 道路潜在风险的应对态度。 作为优选方案,所述步骤S2进一步包括: 以速度、位置与历史事故数据作为输入量输入至事先训练好的神经网络模型,从 而获得神经网络模型所输出的风险等级。 作为优选方案,其特征在于: 所述步骤S1中还向邻近的路侧单元请求当前路段的天气信息; 所述步骤S2中还将天气信息作为神经网络模型的输入量之一进行评估。 作为优选方案,所述步骤S3进一步包括: 统计本车车主以往在事故多发路段的车速控制总数,并从中筛选出减速次数,若 3 CN 111612140 A 说 明 书 2/5 页 减速次数在车速控制总数中的占比超过设定阈值则将所述应对态度归为谨慎,否者将所述 应对态度归为激进。 作为优选方案,所述步骤S4进一步包括: 若所述风险等级为高,则无视车主的应对态度而将本车的车速控制为设定的安全 速度; 若所述风险等级为中,且所述应对态度为激进,则控制本车与前车保持相同速度 行驶; 若所述风险等级为中,且所述应对态度为谨慎,则控制本车进行减速; 若所述风险等级为低,则控制本车按原速行驶。 作为优选方案,根据本车与前车之间的距离,结合刹车滑动理论,确定所述安全速 度。 还提供一种设备,其中,该设备包括: 控制器;以及, 被安排成存储计算机可执行指令的存储器,所述可执行指令在被执行时使所述控 制器实现上述的方法。 还提供一种计算机可读存储介质,其中,所述计算机可读存储介质存储一个或多 个程序,所述一个或多个程序当被控制器执行时,实现上述的方法。 有益效果: 本发明的方法通过路侧单元下载当前路段的历史事故数据,基于速度、位置与历 史事故数据判别路段风险等级,并结合以往在事故多发路段的车速控制行为分析车主的风 险应对倾向,根据风险等级及应对倾向综合考量车速调整措施,实现保障自动驾驶安全的 同时,充分考虑车主意愿,提高车主的自动驾驶体验。 上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段, 而可依照说明书的内容予以实施,并且为了让本发明的上述和其它目的、特征和优点能够 更明显易懂,以下特举本发明的











