
技术摘要:
本发明提供一种水陆两栖无人艇车,要点是:驱动传动系统由前、后驱动传动总成组成,其中后驱动传动总成为一个或两个并列;前驱动传动总成是,前电调器的输出端接在前电机的输入端,前电机及其减速机的输出轴、里、外万向传动轴和前驱动桥的输入端依次连接;后驱动传动 全部
背景技术:
CN2918125Y公开了一种水陆两用游艇、车,它包括传动系统、上艇体3和下艇体1, 传动系统安装在下艇体1里,传动系统是,由发动机5驱动的动力轴11,动力轴上装配的一个 齿轮组9依次连接一个倒车总成17和前驱动桥6,实现陆地行驶;动力轴上装配的另一个齿 轮组10依次连接另一个倒车总成15和水轮7及其驱动轴(即螺旋桨推进器),实现水中航行。 机动车底盘总成的前驱动桥6、后驱动桥14安装在艇身的下部。CN2918125Y还包括方向盘4, 由人驾驶,属于载人游乐艇车;其驱动源采用了发动机,相应地还需要配备油箱。 与本发明相关的游乐设施还包括遥控车和遥控艇,遥控车包括前驱动桥及其转向 舵机;遥控艇包括转向舵板及其转向舵机。遥控车和遥控艇适于单一场合运行,产生的乐趣 单一。
技术实现要素:
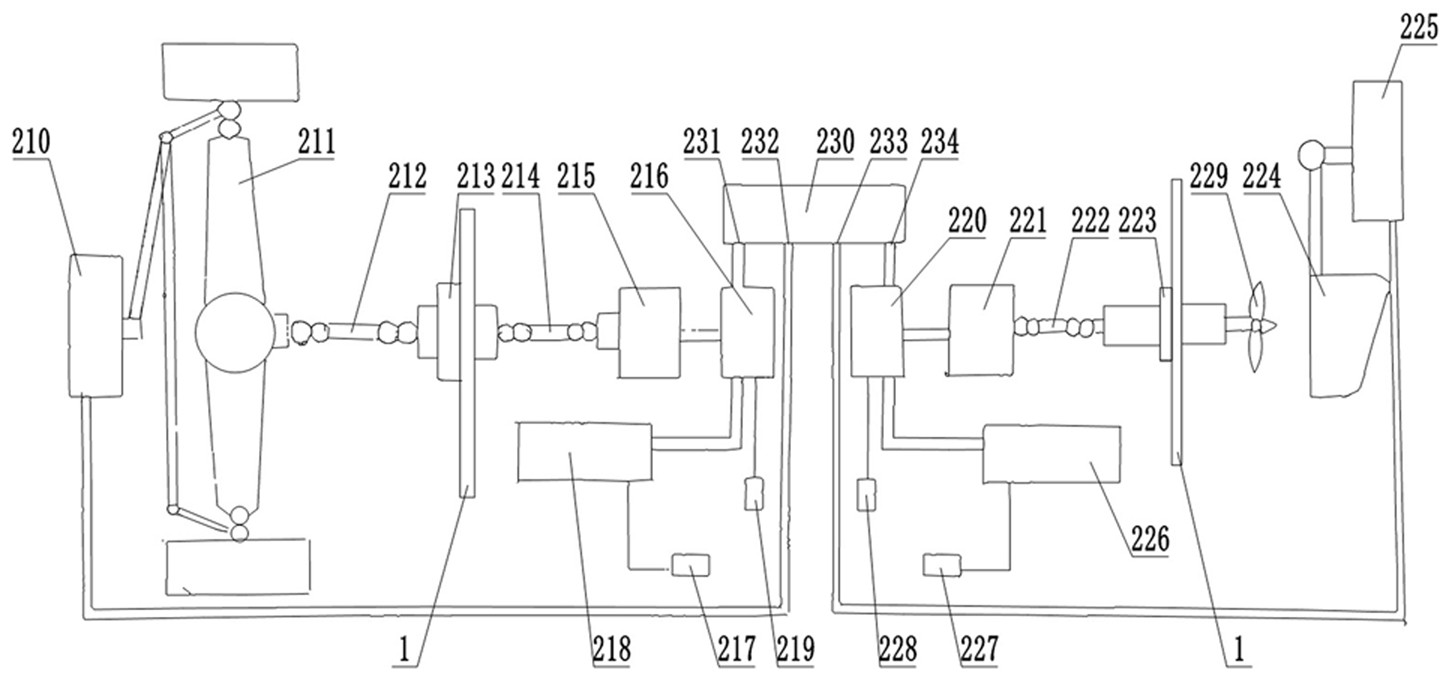
本发明的目的是提供另一种游乐设施-水陆两栖无人艇车,它与遥控器(包括发 射器及其接收器)一起构成遥控型水陆两栖无人艇车(本发明不包括遥控器)。 本发明的目的是这样实现的:它包括下艇体和安装在下艇体的驱动传动系统,其 特征是:驱动传动系统由前、后驱动传动总成组成,其中后驱动传动总成为一个或两个并 列;前驱动传动总成是,前驱电调器的输出端接在前驱直流电机的输入端,前驱直流电机及 其减速机的输出轴、里万向传动轴、外万向传动轴和前驱动桥的输入端依次连接,其中前驱 动桥带转向舵机;后驱动传动总成是,后驱电调器的输出端接在后驱直流电机的输入端,后 驱直流电机及其减速机的输出轴、后万向传动轴和螺旋桨的轴依次连接;每个电调器接一 个锂电池电源和开关;上述电调器及其电源、开关、电机及其减速机、里万向传动轴和后万 向传动轴设置在艇身密封舱里,在里、外万向传动轴之间、后万向传动轴与螺旋桨的轴之间 各设置一个传动密封组件;每个电调器接一个锂电池电源和开关。 控制本发明陆地行驶或水中航行的遥控器可以是两个(即现有的遥控车遥控器、 遥控艇遥控器),也可以将这两个遥控器集成在一起成为一个集成型遥控器,优选集成型遥 控器,与本发明一起构成遥控型水陆两栖无人艇车。使用的集成型遥控器的接收器有四个 输出端(即四通道遥控器)。在接收器的每个输出端上依次接本发明前驱动传动总成的前驱 电调器的输入端、前驱动桥转向舵机的输入端、后驱动传动总成的后驱电调器的输入端、舵 板转向舵机的输入端或另一个后驱动传动总成的后驱电调器的输入端。当本发明在陆地需 要行驶时,游戏人打开前驱电调器的开关、关闭后驱电调器的开关,并操控集成遥控器发射 器的陆地行驶操纵杆,发出陆地行驶命令,其接收器接收该命令信号,并向本发明的前驱电 调器传输,前驱直流电机及其减速机输出扭矩,里、外万向传动轴和前驱动桥依次传动该扭 矩,安装在前驱动桥的主动车轮按命令旋转(前进、倒退或转弯)。当本发明在水中需要航行 3 CN 111605376 A 说 明 书 2/3 页 时,游戏人关闭前驱电调器的开关、打开后驱电调器的开关,并操控集成遥控器发射器的水 中航行操纵杆,发出水中航行命令,接收器接收该命令信号,并向本发明的后驱电调器传 输,后驱直流电机及其减速机输出扭矩,后万向传动轴和螺旋桨传动扭矩,螺旋桨旋转;若 有转向命令,接收器使舵板摆动、或关闭其中一个后驱电调器的开关导致该螺旋桨停转。当 本发明需要从水中往陆地爬行时,将前、后驱电调器的开关全部打开,车轮和螺旋桨同时旋 转。 与CN2918125Y相比,本发明为游乐增加了新的设施,由此会产生新的游戏规则,增 加新的游戏乐趣。与遥控车和遥控艇相比,本发明可以实现水陆两栖运行。 附图说明 下面结合附图进一步说明本发明。 图1是本发明的示意图。 图2是图1中驱动传动系统的示意图,也是单后驱的驱动传动系统的示意图。 图3是双后驱的驱动传动系统的示意图。











