
技术摘要:
本发明公开了一种汽车智能倒车警示系统,其特征在于:包括倒车控制器,所述倒车控制器的信号输入端通讯连接有信号处理模块和油门踏板,所述信号处理模块的信号输入端分别通讯连接有摄像头和雷达传感器,所述倒车控制器分别双向通讯连接有仪表显示器、自动变速箱和制动 全部
背景技术:
为了避免倒车产生碰撞等后果,目前已有技术皆是倒车自动紧急制动后,防止碰 撞,但多数机动车没有装载倒车自动制动,或者只利用超声波雷达完成,装载倒车自动制动 系统的车,在倒车速度超过5km/h时也并不会触发功能,驾驶员操作困难。 因此,现有的防止倒车产生碰撞的技术存在触发系统不完善,操作困难,没有广泛 搭载功能的缺点,在例如红绿灯路口或者后方车距较小时,从安全角度考虑,驾驶员不应该 进行倒车操作,在驾驶员强行进行倒车操作时需要对驾驶员进行提示。
技术实现要素:
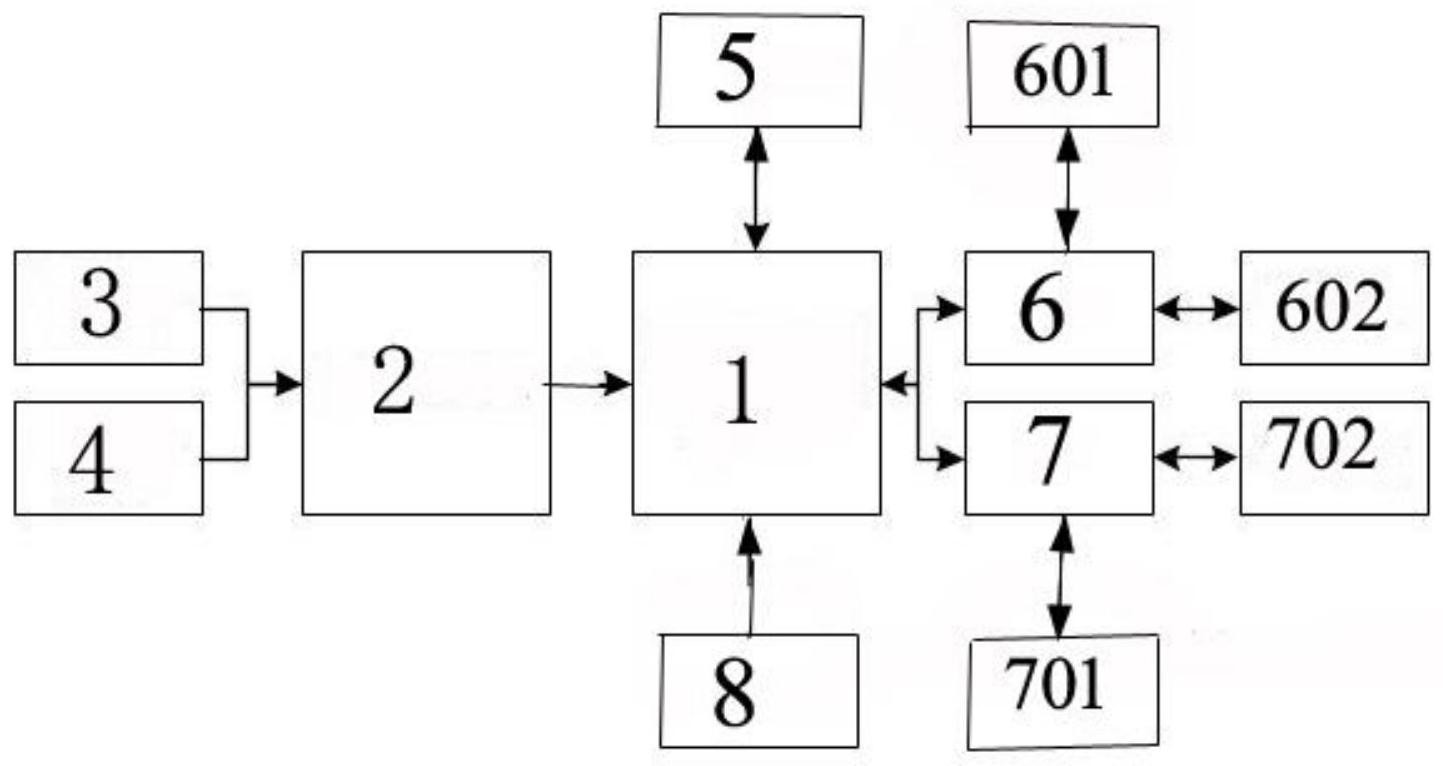
本发明的目的就是要克服上述现有技术存在的不足,提供一种汽车智能倒车警示 系统及其控制方法,可以自动识别不具备倒车条件的场景,在驾驶员强行进行倒车操作时 进行锁止并警示,提高了驾驶安全性。 为实现上述目的,本发明提供一种汽车智能倒车警示系统,其特征在于:包括倒车 控制器,所述倒车控制器的信号输入端通讯连接有信号处理模块和油门踏板,所述信号处 理模块的信号输入端分别通讯连接有摄像头和雷达传感器,所述倒车控制器分别双向通讯 连接有仪表显示器、自动变速箱和制动系统。 进一步地,所述自动变速箱包括有倒挡锁止机构和倒挡机构。 进一步地,所述制动系统包括驻车制动器和行车制动器。 一种基于上述汽车智能倒车警示系统的控制方法,其特征在于,包括以下步骤: 1)驾驶员操作倒挡机构时,路况感知传感器获取路况信息; 2)信号处理模块分析和处理获取的路况信息; 3)倒车控制器(1)判断处理后的路况信息,当前方有红绿灯且感知后方有物体,或 者与后方物体的距离小于安全值时,禁止倒车操作;否则,执行倒车操作; 4)禁止倒车操作后,倒车控制器控制仪表显示器进行警示和确认; 5)仪表显示器将已警示信号反馈给倒车控制器,并解除禁止倒车操作,驾驶员根 据需求选择是否继续执行倒车操作。 进一步地,步骤1)中,路况感知传感器包括摄像头和雷达传感器。 进一步地,摄像头获取前方红绿灯信号和后方有无物体信号,雷达传感器获取后 方物体距离信号。 进一步地,步骤3)中,车距警戒值大于车距安全值。 进一步地,步骤3)中,当前方有红绿灯且感知后方有物体时,倒车控制器控制自动 变速箱中的倒挡锁止机构执行倒挡锁止操作;当前方无红绿灯且后方车距小于车距安全值 3 CN 111572449 A 说 明 书 2/3 页 时,倒车控制器控制制动系统执行驻车制动或者行车制动。 进一步地,步骤5)中,当与后方物体的距离小于安全值时,若驾驶员继续执行倒车 操作,则先手动取消驻车制动器的驻车制动,或者踩踏油门踏板达到开合度临界值取消行 车制动,再执行倒车操作。 本发明的有益效果是:对不具备倒车条件时的倒车操作进行锁止和警示,提高驾 驶安全性。当驾驶员执行倒车操作时,倒车控制器判定摄像头和雷达传感器采集的路况信 息是否具备倒车条件,若不具备条件时,则禁止倒车操作并通过仪表显示器进行警示,当驾 驶员确认继续进行倒车操作,可取消禁止倒车操作的限制,提高了驾驶的安全性。 附图说明 图1为本发明汽车智能倒车警示系统示意图。 图中各部件标号如下:倒车控制器1、信号处理模块2、摄像头3、雷达传感器4、仪表 显示器5、自动变速箱6、倒挡锁止机构601、倒挡机构602、制动系统7、驻车制动器701、行车 制动器702、油门踏板8。











