
技术摘要:
本发明涉及用于车辆的对象检测设备和方法。该对象检测设备包括第一相机单元、第二相机单元以及控制单元。第一相机单元包括一个或多个相机,并且被配置为捕获车辆周围的图像。第二相机单元包括一个或多个相机,并且被配置为捕获车辆前方区域的图像。该控制单元被配置为 全部
背景技术:
随着汽车电子技术的发展,越来越多的技术被用来辅助或替代驾驶员的驾驶操 作。例如,这些技术可以包括从常规碰撞感测系统到自主车辆的各种技术。利用这类技术的 最基本的前提之一是检测车辆周围的对象,并且这类技术不断地被研究与开发。 应用于车辆的对象检测系统可以利用各种传感器来实现,诸如超声波传感器、激 光雷达传感器、雷达传感器、视觉传感器(例如,相机)等。雷达传感器可以容易地识别位于 本车辆周围的对象的位置信息或距本车辆的距离信息,但是难以识别对象的形状。相机可 以容易地识别对象的形状,但是难以通过使用单个相机来识别对象的位置信息。因此,通常 使用组合使用相机与其他传感器的对象检测系统。 使用各种传感器的常规对象检测系统基本上被配置为不仅计算从本车辆到检测 到的对象的距离信息和围绕检测到的对象的边界框,还将计算出的信息传送到用于车辆控 制的控制系统。即,对象检测系统将检测到的对象信息传送到例如转向控制系统、制动控制 系统、自主驾驶控制系统等,使得各个系统可以使用对象信息执行车辆控制。 为了执行对象检测,越来越多的车辆使用安装在其上的前置相机。这类前置相机 也被称为多功能相机(MFC)。通常,前置相机被安装在车辆中的室内镜(例如,后视镜)周围, 以便面向前方,并且因此捕获车辆前方区域的图像。这类MFC甚至可以捕获车辆前方相当长 距离处的区域的图像,并且通常具有广阔的视场(FOV)。作为车辆的各种便利装置之一,环 绕视图监视器(SVM)系统可以被使用。这类SVM系统使车辆中的驾驶员能够通过安装在车辆 的前表面、后表面以及侧表面上的相机看到车辆周围的区域。通常,相机被安装在面向地面 的方向上,以便捕获有限区域的图像。 在2017年10月26日公开的标题为《System and Method for Detecting Object》 的韩国专利申请公开号10-2017-0119167中公开了用于检测对象的常规系统和方法。 在本节中所公开的上面的信息仅用于理解本发明的概念的背景,并且因此可能包 含不构成现有技术的信息。
技术实现要素:
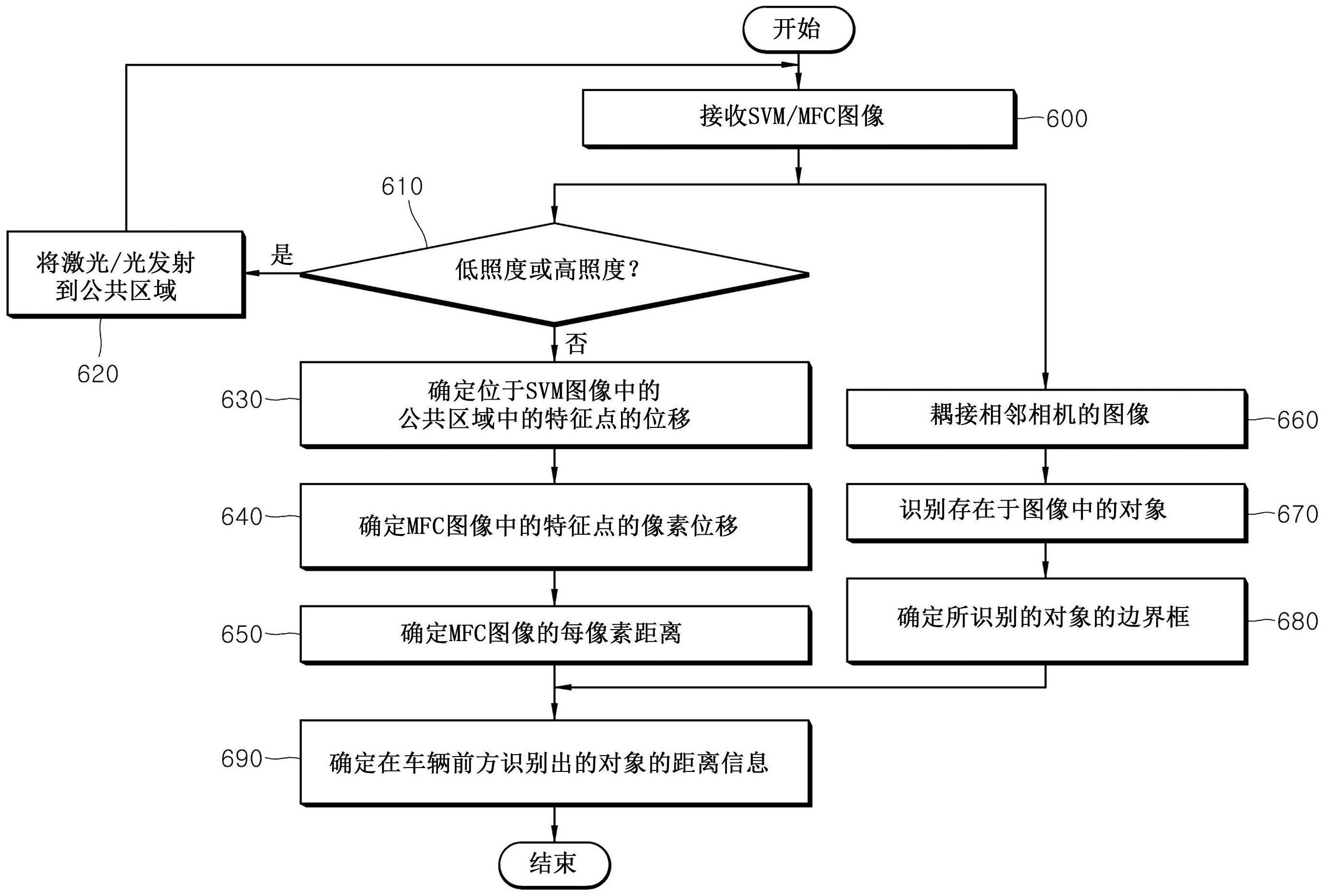
一些方面提供了能够使用与车辆相关联的两种相机系统来检测对象的用于车辆 的对象检测设备。 4 CN 111611841 A 说 明 书 2/9 页 一些方面提供了能够使用与车辆相关联的两种相机系统来检测对象的用于车辆 的对象检测方法。 另外的方面将在随后的详细描述中阐述,并且部分将从公开内容中显而易见、或 者可以通过本发明的概念的实践来学习。 根据一些方面,对象检测设备包括第一相机单元、第二相机单元以及控制单元。第 一相机单元包括一个或多个相机,并且被配置为捕获车辆周围的图像。第二相机单元包括 一个或多个相机,并且被配置为捕获车辆前方区域的图像。控制单元被配置为:从经由第一 相机单元获取的图像来确定位于公共区域中的特征点的位移;确定经由第二相机单元获取 的图像中的特征点的像素位移;以及基于特征点的位移和特征点的像素位移来确定到经由 第二相机单元捕获的图像中识别出的对象的距离信息。 在一个实施方式中,控制单元可以被配置为:基于特征点的位移和特征点的像素 位移来确定经由第二相机单元捕获的图像的每像素距离信息;并且使用每像素距离信息来 确定到所识别的对象的距离信息。 在实施方式中,控制单元可以被配置为将经由第一相机单元获取的图像的每像素 距离信息存储为预定信息。 在实施方式中,公共区域可以是第一相机单元的拍摄区域与第二相机单元的拍摄 区域重叠的区域。 在一个实施方式中,第一相机单元可以包括环绕视图监视器(SVM)相机,并且第二 相机单元可以包括多功能相机(MFC)。 在一个实施方式中,对象检测设备还可以包括被配置为照亮公共区域的灯模块。 控制单元可以被配置为经由该灯模块在该公共区域中生成特征点。 在一个实施方式中,对象检测设备还可以包括照度传感器和灯模块。照度传感器 可以被配置为检测车辆外部的照度。灯模块可以被配置为照亮公共区域。控制单元可以被 配置为响应于照度满足预设参考值,经由灯模块在公共区域中生成特征点。 在一个实施方式中,为了生成对象的边界框,控制单元可以被配置为:耦接第一和 第二相机单元的相机当中的相邻的相机的图像以形成耦接图像;对该耦接图像执行对象识 别;并基于对象识别生成边界框。 根据一些方面,一种对象检测方法包括:由控制单元确定位于图像的公共区域中 的特征点的位移,该图像经由被配置为捕获车辆周围的图像的第一相机单元获取;由该控 制单元确定经由被配置为捕获该车辆前方的区域的图像的第二相机单元获取的图像中的 特征点的像素位移;以及由该控制单元基于该特征点的位移和该特征点的像素位移来确定 到经由该第二相机单元捕获的图像中识别出的对象的距离信息。 在一个实施方式中,确定到对象的距离信息可以包括:由控制单元基于特征点的 位移和特征点的像素位移来确定经由第二相机单元捕获的图像的每像素距离信息;以及由 控制单元使用该每像素距离信息来确定到该对象的距离信息。 在一个实施方式中,对象检测方法还可以包括:至少部分地使灯模块在确定特征 点的位移之前在公共区域中生成特征点。 在一个实施方式中,对象检测方法还可以包括由控制单元经由照度传感器在生成 特征点之前检测车辆外部的照度。控制单元可以被配置为响应于照度满足预设参考值,至 5 CN 111611841 A 说 明 书 3/9 页 少部分地使灯模块生成特征点。 在一个实施方式中,对象检测方法还可以包括:由控制单元耦接第一和第二相机 单元的相机当中的相邻的相机的图像;并且由控制单元经由对象识别生成针对耦接图像中 识别出的对象的边界框。 在一个实施方式中,对象检测方法还可以包括至少部分地使灯模块照亮整个公共 区域。 根据一些方面,一种设备包括至少一个处理器和至少一个存储器。该至少一个存 储器包括一个或多个指令的一种或多种序列,该一个或多个指令的一种或多种序列被配置 为响应于经由该至少一个处理器而执行,使该设备至少:经由一个或多个第一图像确定特 征点的位移,该一个或多个第一图像对应于车辆周围的区域;经由一个或多个第二图像确 定该特征点的像素位移,该一个或多个第二图像对应于该车辆的行进路径中的区域;以及 基于特征点的位移和特征点的像素位移来确定到第二图像中的对象的距离信息。 在一个实施方式中,特征点可以位于一个或多个第一图像和一个或多个第二图像 公共的区域中。 在一个实施方式中,至少一个存储器和该一个或多个指令的一种或多种序列可以 被配置为:响应于经由该至少一个处理器而被执行,使该设备至少:基于该特征点的位移和 该特征点的像素位移,经由该一个或多个第二图像来确定每像素距离信息;并且基于每像 素距离信息来确定到对象的距离信息。 在一个实施方式中,至少一个存储器和一个或多个指令的一种或多种序列还可以 被配置为响应于经由该至少一个处理器而被执行,使该设备至少照亮该车辆行进路径中的 该区域的一部分,以生成特征点。 在一个实施方式中,至少一个存储器和一个或多个指令的一种或多种序列还可以 被配置为响应于经由该至少一个处理器而被执行,使该设备至少检测周围环境的照度。特 征点的生成可以响应于照度对预定条件的满足。 在一个实施方式中,至少一个存储器和该一个或多个指令的一种或多种序列还可 以被配置为:响应于经由该至少一个处理器而被执行,使该设备至少:耦接该一个或多个第 一图像中的第一图像与该一个或多个第二图像中的第二图像;并生成于相对于该对象的边 界框信息。 根据各种示例性实施方式,用于车辆的对象检测设备和用于车辆的对象检测方法 可以使用安装在车辆中、车辆上或以其他方式与车辆相关联的两种相机系统来检测对象的 距离信息和边界框。因此,可以不使用诸如雷达传感器和激光雷达传感器的传感器。此外, 用于车辆的对象检测设备和用于车辆的对象检测方法可以通过光发射和图像耦接来改善 在恶劣环境条件(例如,低照度和背光)和易损区域(例如,低分辨率/低图像质量)下的对象 识别性能。 应当理解,前面的总体描述和下面的详细描述都是示例性和解释性的,并且旨在 提供对所要求保护的本发明的进一步解释。 附图说明 为进一步理解本发明的概念而包括在本说明书中并构成本说明书部分的附图说 6 CN 111611841 A 说 明 书 4/9 页 明了本发明的概念的示例性实施方式,并与说明书一起用于解释本发明的概念的原理。 图1是示出根据一些示例性实施方式的用于车辆的对象检测设备的配置的框图。 图2是根据一些示例性实施方式的用于描述用于图1的车辆的对象检测设备中的 多功能相机(MFC)和环绕视图监视器(SVM)相机的拍摄区域的图。 图3至图6是示出根据各种示例性实施方式的用于车辆的对象检测方法的流程图。











