
技术摘要:
本发明提供一种图像单元确定方法、小目标检测方法及计算机设备,通过获取待测图片以及待测图片对应的视场尺寸,并获取待测小目标的实际尺寸;然后根据待测小目标的实际尺寸、所述视场尺寸和预设的分辨比例,确定切分数量,其中,所述分辨比例用于指示在所述待测图片的 全部
背景技术:
无人机(Unmanned Aerial Vehicle,简称:UAV)是一种有动力、可控制、能携带多 种任务设备、执行多种任务,并能重复使用的无人驾驶飞行器。随着无人机性能的不断提 高,以及其所具有的体积小、机动灵活、不易被发现等优点,使得无人机在侦查和巡逻、建筑 物勘察、航空地图绘制、危险环境下的清障等军事和民用特殊领域显示出了巨大的应用潜 力。其中,由于无人机主要是远距离拍摄图像,视场范围通常较大,因此无人机可以用于实 现对特定小目标的检测和跟踪。 现有的小目标检测的方法很多,包括传统机器视觉、深度学习等方案,例如生成图 像的稳定图,然后通过逐像素比较LAB颜色空间获取显著性图,最后融合稳定图和显著性图 来移除虚警,实现行人、车辆等小目标检测。 然而,发明人在研发过程中发现,现有技术中小目标检测方法的计算量过大,检测 效率不高。
技术实现要素:
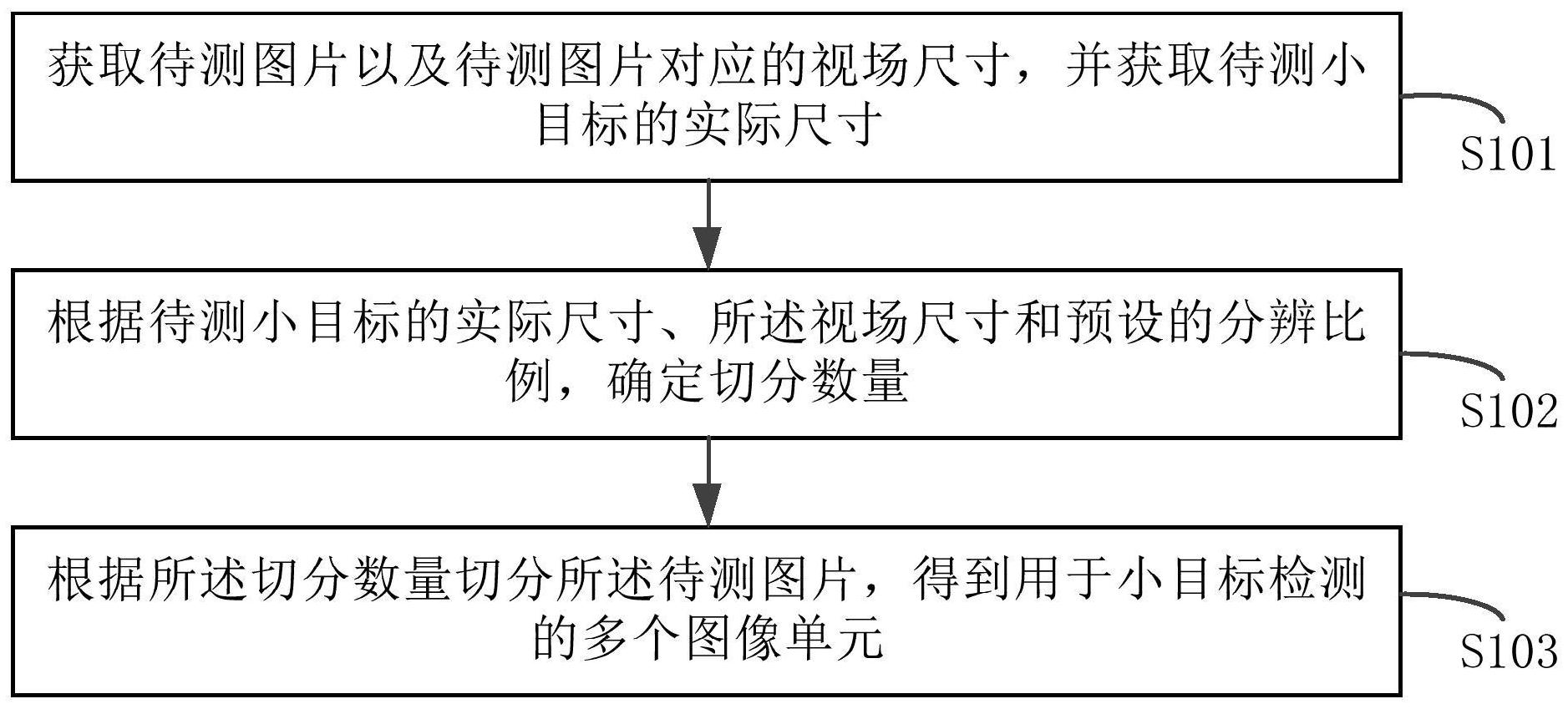
本发明实施例提供一种图像单元确定方法、小目标检测方法及计算机设备,提高 了图像单元的可靠性,进而提高了小目标检测的准确性。 根据本发明的第一方面,提供一种图像单元确定方法,包括: 获取待测图片以及待测图片对应的视场尺寸,并获取待测小目标的实际尺寸; 根据待测小目标的实际尺寸、所述视场尺寸和预设的分辨比例,确定切分数量,其 中,所述分辨比例用于指示在所述待测图片的每个图像单元的像素尺寸中所述待测小目标 的像素尺寸的占比; 根据所述切分数量切分所述待测图片,得到用于小目标检测的多个图像单元。 可选地,在第一方面的一种可能实现方式中,所述获取待测图片以及待测图片对 应的视场尺寸,并获取待测小目标的实际尺寸,包括: 获取无人机拍摄的待测图片,以及所述待测图片的拍摄信息; 根据所述拍摄信息,确定所述待测图片对应的视场尺寸。 可选地,在第一方面的另一种可能实现方式中,所述拍摄信息包括拍摄高度、相机 横向视场角、相机纵向视场角以及相机倾角; 所述根据所述拍摄信息,确定所述待测图片对应的视场尺寸,包括: 确定所述相机倾角为0,则以公式一确定所述待测图片对应的视场尺寸: 5 CN 111553339 A 说 明 书 2/14 页 其中,Sxy为所述视场尺寸,h为所述拍摄高度,θx为所述相机横向视场角,θy为所述 相机纵向视场角。 可选地,在第一方面的再一种可能实现方式中,所述根据所述切分数量切分所述 待测图片,得到用于小目标检测的多个图像单元,包括: 根据所述切分数量均匀地切分所述待测图片,得到用于小目标检测的多个图像单 元。 可选地,在第一方面的又一种可能实现方式中,所述根据所述拍摄信息,确定所述 待测图片对应的视场尺寸,还包括: 确定所述相机倾角大于0,则沿所述相机的倾斜方向依次确定若干个子视场区域; 分别获取各所述子视场区域的尺寸; 以所述若干个子视场区域的尺寸之和,作为所述待测图片对应的视场尺寸。 可选地,在第一方面的又一种可能实现方式中,所述若干个子视场区域为4个子视 场区域; 所述分别获取各所述子视场区域的尺寸,包括: 在确定所述相机倾角大于0且小于或等于 时,以公式二依次获取所述4个子视场 区域的尺寸: 其中,S1y、S2y、S3y、S4y依次为所述4个子视场区域的尺寸,β为所述相机倾角,h为所 述拍摄高度,θx为所述相机横向视场角,θy为所述相机纵向视场角; 所述以所述若干个子视场区域的尺寸之和,作为所述待测图片对应的视场尺寸, 包括: 以公式三确定所述待测图片对应的视场尺寸: 其中,Sxy为所述视场尺寸。 可选地,在第一方面的又一种可能实现方式中,所述若干个子视场区域为4个子视 场区域; 所述分别获取各所述子视场区域的尺寸,包括: 在确定所述相机倾角大于 时,以公式四依次获取所述4个子视场区域的尺寸: 6 CN 111553339 A 说 明 书 3/14 页 其中,S1y、S2y、S3y、S4y依次为所述4个子视场区域的尺寸,β为所述相机倾角,h为所 述拍摄高度,θx为所述相机横向视场角,θy为所述相机纵向视场角; 所述以所述若干个子视场区域的尺寸之和,作为所述待测图片对应的视场尺寸, 包括: 以公式五确定所述待测图片对应的视场尺寸: 其中,Sxy为所述视场尺寸。 可选地,在第一方面的又一种可能实现方式中,所述根据待测小目标的实际尺寸、 所述视场尺寸和预设的分辨比例,确定切分数量,包括: 以公式六确定所述待测图片对应的切分数量: 其中,N为所述切分数量,Sxy为所述视场尺寸,C为所述待测小目标的实际尺寸, 为所述预设的分辨比例。 根据本发明的第二方面,提供一种小目标检测方法,包括: 根据本发明第一方面及其各种可能实现方式中任一所述的图像单元确定方法,在 待测图片中得到用于小目标检测的多个图像单元; 对所述多个图像单元逐个进行所述待测小目标的检测,获得所述小目标的检测结 果。 根据本发明的第三方面,提供一种计算机设备,存储器、处理器以及计算机程序, 所述计算机程序存储在所述存储器中,所述处理器运行所述计算机程序执行以下步骤: 获取待测图片以及待测图片对应的视场尺寸,并获取待测小目标的实际尺寸; 根据待测小目标的实际尺寸、所述视场尺寸和预设的分辨比例,确定切分数量,其 中,所述分辨比例用于指示在所述待测图片的每个图像单元的像素尺寸中所述待测小目标 的像素尺寸的占比; 根据所述切分数量切分所述待测图片,得到用于小目标检测的多个图像单元。 可选地,在第三方面的一种可能实现方式中,所述处理器还用于执行以下步骤: 获取无人机拍摄的待测图片,以及所述待测图片的拍摄信息; 根据所述拍摄信息,确定所述待测图片对应的视场尺寸。 可选地,在第三方面的另一种可能实现方式中,所述处理器还用于执行以下步骤: 所述拍摄信息包括拍摄高度、相机横向视场角、相机纵向视场角以及相机倾角; 所述根据所述拍摄信息,确定所述待测图片对应的视场尺寸,包括: 7 CN 111553339 A 说 明 书 4/14 页 确定所述相机倾角为0,则以公式一确定所述待测图片对应的视场尺寸: 其中,Sxy为所述视场尺寸,h为所述拍摄高度,θx为所述相机横向视场角,θy为所述 相机纵向视场角。 可选地,在第三方面的再一种可能实现方式中,所述处理器还用于执行以下步骤: 根据所述切分数量均匀地切分所述待测图片,得到用于小目标检测的多个图像单 元。 可选地,在第三方面的又一种可能实现方式中,所述处理器还用于执行以下步骤: 确定所述相机倾角大于0,则沿所述相机的倾斜方向依次确定若干个子视场区域; 分别获取各所述子视场区域的尺寸; 以所述若干个子视场区域的尺寸之和,作为所述待测图片对应的视场尺寸。 可选地,在第三方面的又一种可能实现方式中,所述处理器还用于执行以下步骤: 所述若干个子视场区域为4个子视场区域; 在确定所述相机倾角大于0且小于或等于 时,以公式二依次获取所述4个子视场 区域的尺寸: 其中,S1y、S2y、S3y、S4y依次为所述4个子视场区域的尺寸,β为所述相机倾角,h为所 述拍摄高度,θx为所述相机横向视场角,θy为所述相机纵向视场角; 所述以所述若干个子视场区域的尺寸之和,作为所述待测图片对应的视场尺寸, 包括: 以公式三确定所述待测图片对应的视场尺寸: 其中,Sxy为所述视场尺寸。 可选地,在第三方面的又一种可能实现方式中,所述处理器还用于执行以下步骤: 所述若干个子视场区域为4个子视场区域; 在确定所述相机倾角大于 时,以公式四依次获取所述4个子视场区域的尺寸: 8 CN 111553339 A 说 明 书 5/14 页 其中,S1y、S2y、S3y、S4y依次为所述4个子视场区域的尺寸,β为所述相机倾角,h为所 述拍摄高度,θx为所述相机横向视场角,θy为所述相机纵向视场角; 所述以所述若干个子视场区域的尺寸之和,作为所述待测图片对应的视场尺寸, 包括: 以公式五确定所述待测图片对应的视场尺寸: 其中,Sxy为所述视场尺寸。 可选地,在第三方面的又一种可能实现方式中,所述处理器还用于执行以下步骤: 以公式六确定所述待测图片对应的切分数量: 其中,N为所述切分数量,Sxy为所述视场尺寸,C为所述待测小目标的实际尺寸, 为所述预设的分辨比例。 根据本发明的第四方面,提供一种计算机设备,包括:存储器、处理器以及计算机 程序,所述计算机程序存储在所述存储器中,所述处理器运行所述计算机程序执行以下步 骤: 根据本发明第一方面及其各种可能实现方式中任一所述的图像单元确定方法,在 待测图片中得到用于小目标检测的多个图像单元; 对所述多个图像单元逐个进行所述待测小目标的检测,获得所述小目标的检测结 果。 根据本发明的第五方面,提供一种可读存储介质,所述可读存储介质中存储有计 算机程序,所述计算机程序被处理器执行时用于实现本发明第一方面及其各种可能实现方 式中任一所述的图像单元确定方法。 根据本发明的第六方面,提供一种可读存储介质,所述可读存储介质中存储有计 算机程序,所述计算机程序被处理器执行时用于实现本发明第二方面所述的小目标检测方 法。 本发明提供的一种图像单元确定方法、小目标检测方法及计算机设备,通过获取 待测图片以及待测图片对应的视场尺寸,并获取待测小目标的实际尺寸;然后根据待测小 目标的实际尺寸、所述视场尺寸和预设的分辨比例,确定切分数量,其中,所述分辨比例用 于指示在所述待测图片的每个图像单元的像素尺寸中所述待测小目标的像素尺寸的占比; 根据所述切分数量切分所述待测图片,得到用于小目标检测的多个图像单元,在图像单元 切分过程中引入视场尺寸和小目标的实际尺寸,以使得到的图像单元满足分辨比例,提高 9 CN 111553339 A 说 明 书 6/14 页 图像单元的切分可靠性,从而提高小目标检测的效率。 附图说明 图1是本发明实施例提供的一种应用场景示意图; 图2是本发明实施例提供的一种图像单元确定方法流程示意图; 图3是本发明实施例提供的一种相机倾角大于0且小于 的示意图; 图4是本发明实施例提供的一种相机倾角大于 且小于 的示意图; 图5是本发明实施例提供的一种相机倾角大于 的示意图; 图6是本发明实施例提供的一种计算机设备的硬件结构示意图; 图7是本发明实施例提供的一种计算机设备的硬件结构示意图。











