
技术摘要:
公开了包括动态末端执行器系统的可编程运动系统。动态末端执行器系统包括提供在可编程运动设备可访问的区域内的交换站处的多个获取单元,以及耦合系统,所述耦合系统用于将多个获取单元中的任一者耦合到可编程运动设备的末端执行器,使得获取单元中的任一者可以由可编 全部
背景技术:
本发明总体上涉及可编程运动系统,并且尤其涉及用于在物体处理(诸如物体分 拣)中使用的可编程运动系统(例如,机器人系统)的末端执行器。 例如,在某些应用中,可以采用用于机器人系统的末端执行器以选择和抓握物体, 并且随后将所获取的物体非常快速地移动到新位置。末端执行器应该被设计成从一杂乱堆 的相异物体中快速且容易地选择和抓握物体,并且应该被设计成在移动期间牢固地抓握物 体。当使用在不同物理尺寸、重量和材料的不同物体上时,某些末端执行器可以具有极限, 该极限关于在快速移动、特别是快速(线性的和角的)加速和(线性的和角的)减速期间它们 可以多么牢固地抓握所获取的物体。 许多末端执行器采用真空压力用于获取和固定物体以供由铰接臂运输和/或进行 后续操作。用于获取和固定物体的其他技术包括:静电吸引、磁吸引、用于穿透物体(诸如织 物)的针、挤压物体的指状物、接合和提升物体的突出特征的钩、以及在物体的开口中扩展 的夹头等其他技术。通常,末端执行器被设计成单个工具,诸如例如,夹持器、焊机、或油漆 喷头,并且该工具通常设计用于特定的一组需求。 然而,仍然存在对于可编程运动系统中的末端执行器系统的需要,该末端执行器 系统可以选择和抓握各种各样的物体中的任何物体,并且随后将所获取的物体非常快速地 移动到新位置。
技术实现要素:
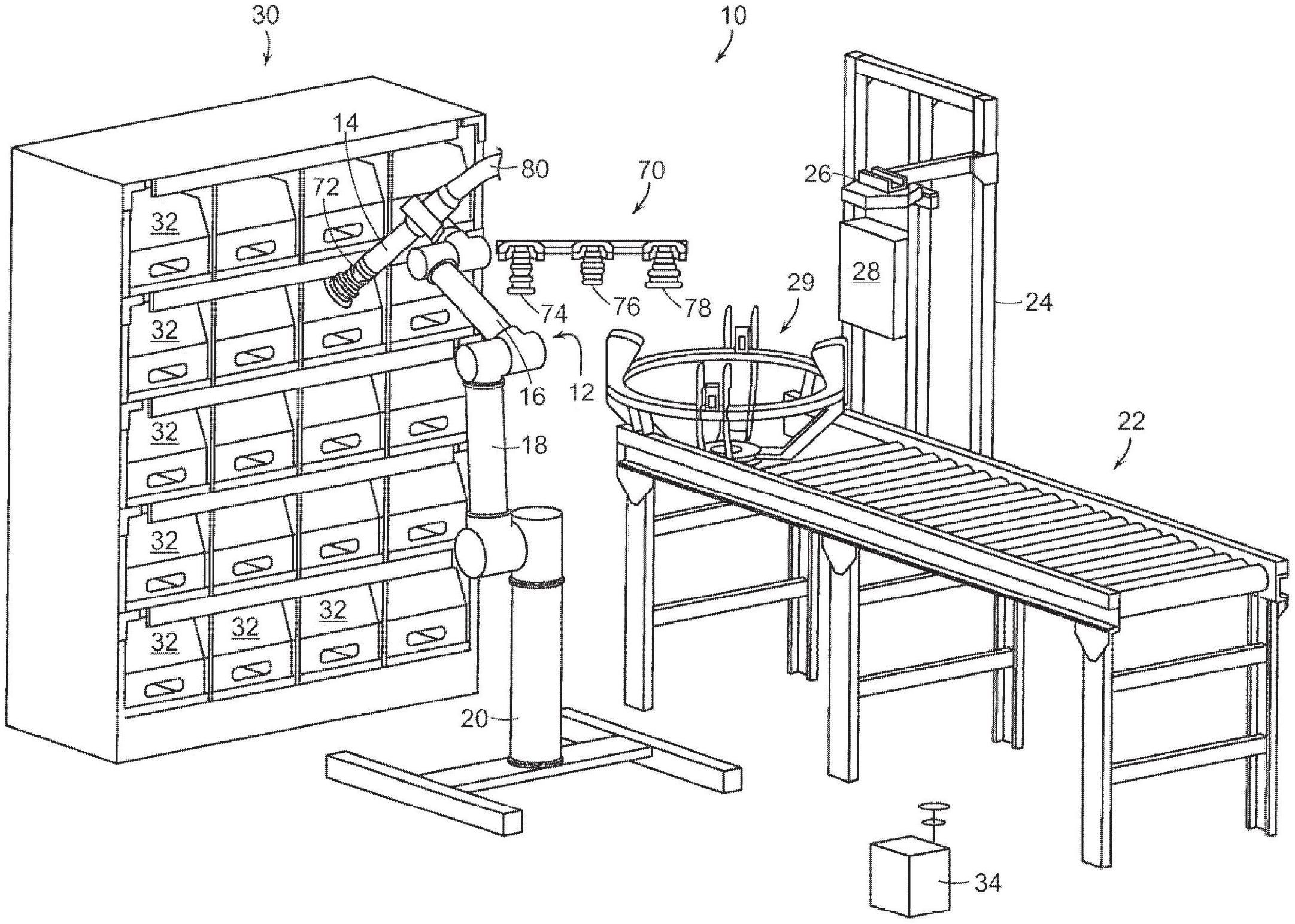
根据实施例,本发明提供了包括动态末端执行器系统的可编程运动系统。动态末 端执行器系统包括提供在可编程运动设备可访问的区域内的交换站处的多个获取单元,以 及耦合系统,所述耦合系统用于将多个获取单元中的任一者耦合到可编程运动设备的末端 执行器,使得获取单元中的任一者可以由可编程运动设备从交换站自动选择并使用,而不 需要交换站的任何激活或致动,并且不需要人类的任何干预。 根据另一个实施例,本发明提供了包括动态末端执行器系统的可编程运动系统。 动态末端执行器系统包括:多个真空杯,通过所述多个真空杯提供真空,并且所述多个真空 杯中的每一个可以被附接到所述末端执行器系统的末端执行器,其中所述可编程运动系统 能够访问所述多个真空杯中的任一者;以及耦合系统,用于将所述多个真空杯中的任一者 耦合到所述可编程运动设备的所述末端执行器系统的所述末端执行器。 根据进一步实施例,本发明提供了包括动态末端执行器系统的可编程运动系统。 动态末端执行器系统包括多个获取单元,所述多个获取单元被提供在获取单元机架上的所 述可编程运动设备的访问内,所述获取单元机架在至少两个相互正交的方向上可移动。 5 CN 111601686 A 说 明 书 2/11 页 根据又进一步实施例,本发明提供了使用可编程运动系统提供物体的处理的方 法。所述方法包括以下步骤:提供多个真空单元,所述多个真空单元中的每一个可以被附接 到所述末端执行器系统的末端执行器,并且所述多个真空单元中的每一个可以提供通过其 中的真空;访问所述多个真空单元中的任一者;将所述多个真空单元中的任一者耦合到所 述可编程运动设备的所述末端执行器系统的所述末端执行器;以及通过所述可编程运动设 备使用所耦合的真空单元来抓握和移动物体。 附图说明 参考附图可以进一步理解以下描述,其中: 图1示出了根据本发明的实施例的物体处理系统的说明性图解视图; 图2示出了从图1的系统的感知系统向下定向到传送机上的货箱中的视图的说明 性图解视图; 图3示出了图1的系统的第二感知系统的说明性图解视图; 图4示出了图1的系统的包括铰接臂部分和末端执行器部分的可编程运动设备的 说明性图解视图; 图5示出了图4的可编程运动设备的末端执行器部分的说明性图解视图; 图6示出了图1的系统的交换站的说明性图解视图; 图7示出了图5的交换站的说明性图解俯视图; 图8示出了图6的交换站的说明性图解侧视图; 图9A和9B示出了末端执行器和获取单元未耦合(图9A)和已耦合(图9B)的说明性 图解视图; 图10示出了没有获取单元的图6的交换站的说明性图解俯视图; 图11示出了图10的交换站的说明性图解侧视图; 图12A-12D示出了根据本发明的实施例的正被从末端执行器交换到交换站的获取 单元的说明性图解视图; 图13示出了图10的交换站的一部分的说明性图解视图; 图14示出了根据包括无源保持磁体的本发明的另一个实施例的交换站的说明性 图解视图; 图15示出了图14的交换站的说明性图解俯视图; 图16示出了根据包括在托架和获取单元之间的摩擦配合的本发明的进一步实施 例的交换站的说明性图解俯视图; 图17示出了与图16的交换站接合的获取单元的说明性图解; 图18示出了根据进一步包括获取单元识别感知系统的本发明的进一步实施例的 交换站的一部分的说明性图解视图; 图19示出了与图18的交换站接合的具有识别标记的获取单元的说明性图解侧视 图; 图20示出了根据包括获取单元存在检测系统的本发明的进一步实施例的末端执 行器和获取单元的说明性图解侧视图; 图21示出了图20的获取单元存在检测系统的说明性图解仰视图; 6 CN 111601686 A 说 明 书 3/11 页 图22示出了耦合在一起的图20的末端执行器和获取单元的说明性图解侧视图; 图23示出了图20的获取单元的说明性图解俯视图; 图24示出了根据包括获取单元身份检测系统的本发明的进一步实施例的末端执 行器和获取单元的说明性图解侧视图; 图25示出了图24的获取单元存在检测系统的说明性图解仰视图; 图26示出了耦合在一起的图24的末端执行器和获取单元的说明性图解侧视图; 图27示出了图24的获取单元的说明性图解俯视图; 图28示出了安装在x-y移动容纳结构中的图13的交换站部分的说明性图解视图; 图29示出了安装在x-y-z移动容纳结构中的图13的交换站部分的说明性图解视 图; 图30示出了安装在包括x-y位置归零系统的x-y移动容纳结构中的交换站部分的 说明性图解视图; 图31示出了安装在包括x-y-z位置归零系统的x-y-z移动容纳结构中的交换站部 分的说明性图解视图; 图32示出了根据本发明的进一步实施例的包括容纳结构的末端执行器的说明性 图解视图; 图33示出了图32的末端执行器的说明性图解侧视图; 图34示出了具有通过其中的真空的末端执行器和获取单元的说明性图解视图; 图35示出了根据本发明的实施例的处理系统的说明性图解平面图;并且 图36A-36D示出了获取单元被耦合到末端执行器(图36A和36B)、与物体接合(图 36C)、以及将获取单元转移到交换站(图36D)的说明性图解视图。 示出附图仅用于说明目的。











