
技术摘要:
本发明实施例提供一种人体测量方法和装置。其中人体测量方法包括,获取待测量人体的多视角图像数据,基于人体姿态估计库获取人体姿态信息;将所述多视角图像数据通过深度相机的内参转换为点云数据;根据初步人体三维模型的系数和所述点云数据,获取刚性变换矩阵及初步 全部
背景技术:
目前,在许多领域都需要使用到人体尺寸,例如安防、虚拟试衣等领 域。人体尺寸 测量主要通过基于测量仪器的三维人体测量,精度相对于手 动测量精度更高,稳定性更 强,精度最高可达毫米级,是物体的真实三维 数据。但当前市场的人体测量设备一般价格 高昂,且使用需经过专业培训, 不适合于消费级的市场。目前市场上出现的用于人体三维 测量的仪器多数 是基于大型多相机采集设备的,对相机安装精度要求极高,且系统安装后 不可移动或晃动等。 目前,对于三维人体建模方法而言,最常见的建模方法是依靠多相机 采集到不同 方向的人体数据,对数据进行拼接,恢复出一个完整的三维人 体模型。但是,这种方法对场 地、光照、相机间位置要求较高,且测量人 体关键部位尺寸时也没有准确的位置依据,主要 依靠及时检测确定测量位 置,导致对测量精度有一定的影响。 因此,目前在三维人体测量中出现的环境要求高、不可移动和测量精 度低等问题 成为亟待解决的问题。
技术实现要素:
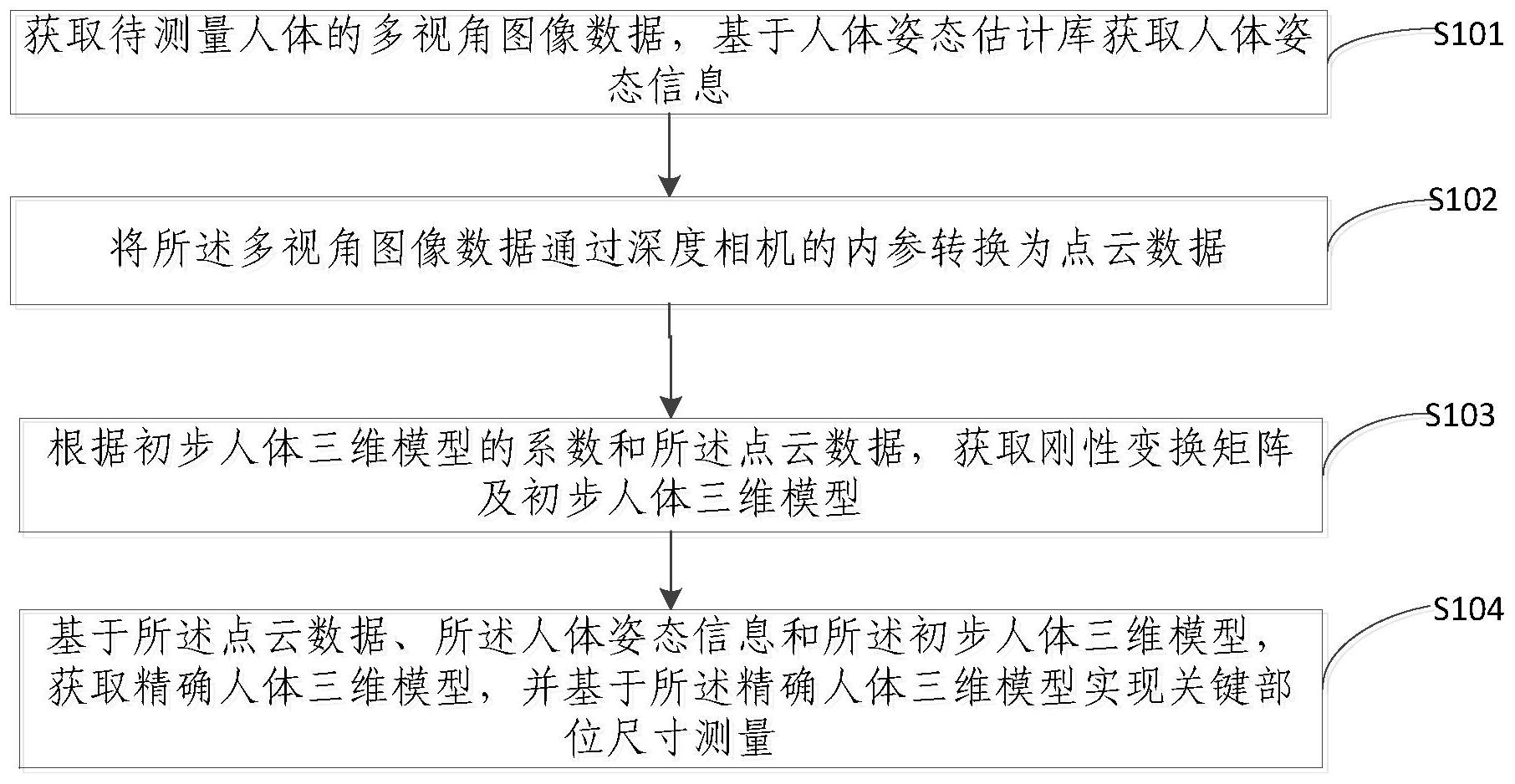
本发明实施例提供一种人体测量方法和装置,用以解决现有技术中三维 人体测 量过程中所需环境要求高、不可移动和测量精度低的问题。 第一方面,本发明实施例提供一种人体测量方法,包括: 获取待测量人体的多视角图像数据,基于人体姿态估计库获取人体姿态 信息; 将所述多视角图像数据通过深度相机的内参转换为点云数据; 根据初步人体三维模型的系数和所述点云数据,获取刚性变换矩阵及初 步人体 三维模型; 基于所述点云数据、所述人体姿态信息和所述初步人体三维模型,获取 精确人体 三维模型,并基于所述精确人体三维模型实现关键部位尺寸测量。 可选地,所述将所述多视角图像数据通过深度相机的内参转换为点云数 据,进一 步包括: 根据深度相机的内参,将所述多视角图像中的每个像素投影至世界坐标 系; 使用泊松重建算法,将所述世界坐标系中每个像素的坐标重建为点云数 据。 可选地,所述根据初步人体三维模型的系数和所述点云数据,获取刚性 变换矩阵 及初步人体三维模型,进一步包括: 根据多视角图像数据中不同的的人体姿态信息,获取粗粒度优化残差; 最小化所述粗粒度优化残差,获取所述点云数据的刚性变换矩阵,并根 据初步人 体三维模型的系数和所述点云数据生成初步人体三维模型。 4 CN 111612887 A 说 明 书 2/9 页 可选地,所述根据多视角图像数据中不同的的人体姿态信息,获取粗粒 度优化残 差,具体包括: 计算所有所述多视角图像数据中不同的人体姿态信息的正则项的和E1; 将所述初步人体三维模型的系数与权重的积和所述E1进行求和,得到粗 粒度优 化残差。 可选地,所述基于所述点云数据、所述人体姿态信息和所述初步人体三 维模型, 获取精确人体三维模型,并基于所述精确人体三维模型实现关键部 位尺寸测量,具体包 括: 根据所述初步人体三维模型,获取所述点云数据的匹配点,并将所有匹 配点构建 成匹配点对; 根据所述匹配点对,优化所述初步人体三维模型的系数和所述点云数据 的刚性 变换矩阵; 根据优化后的初步人体三维模型的系数和所述点云数据的刚性变换矩 阵,获取 精确人体三维模型,并基于所述精确人体三维模型实现关键部位尺 寸测量。 可选地,所述根据所述初步人体三维模型,获取所述点云数据的匹配点, 并将所 有匹配点构建成匹配点对,具体包括: 通过计算点云数据与初步人体三维模型之间的距离和方向向量夹角,筛 选出匹 配点; 将所述点云数据和其在初步人体三维模型上的匹配点组成匹配点对。 可选地,所述根据所述匹配点对,优化所述初步人体三维模型的系数和 所述点云 数据的刚性变换矩阵,具体包括: 根据所述匹配点对,固定所述点云数据的刚性变换矩阵,获取初步人体 三维模型 的系数; 根据所述初步人体三维模型的系数,更新匹配点对,并固定所述初步人 体三维模 型的系数,获取更新后的点云数据的刚性变换矩阵。 可选地,所述根据所述匹配点对,固定所述点云数据的刚性变换矩阵, 获取初步 人体三维模型的系数,具体包括: 根据所述匹配点对,固定点云数据的刚性变换矩阵; 通过最小化匹配点与点云数据之间的误差,得到初步人体三维模型的系 数。 第二方面,本发明实施例提供一种人体测量装置,包括: 获取模块:用于获取待测量人体的多视角图像数据,基于人体姿态估计 库获取人 体姿态信息; 转换模块:用于将所述多视角图像数据通过深度相机的内参转换为点云 数据; 处理模块:用于根据初步人体三维模型的系数和所述点云数据,获取刚 性变换矩 阵及初步人体三维模型; 测量模块:用于基于所述点云数据、所述人体姿态信息和所述初步人体 三维模 型,获取精确人体三维模型,并基于所述精确人体三维模型实现关键 部位尺寸测量。 可选地,所述处理模块进一步用于: 根据多视角图像数据中不同的的人体姿态信息,获取粗粒度优化残差; 5 CN 111612887 A 说 明 书 3/9 页 最小化所述粗粒度优化残差,获取所述点云数据的刚性变换矩阵,并根 据初步人 体三维模型的系数和所述点云数据生成初步人体三维模型。 本发明实施例提供的一种人体测量方法,通过优化初步人体三维模型的 系数和 点云数据的刚性变换矩阵,从而实现对于初步人体三维模型的优化, 并生成精度高的三维 人体模型,并基于所述精确人体三维模型实现关键部位 尺寸测量,具有对测量环境要求 低、移动性较好且测量精度高的优点。 附图说明 为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实 施例或 现有技术描述中所需要使用的附图作一简单地介绍,显而易见地,下 面描述中的附图是本 发明的一些实施例,对于本领域普通技术人员来讲,在 不付出创造性劳动的前提下,还可 以根据这些附图获得其他的附图。 图1为本发明实施例提供的一种人体测量方法的流程示意图; 图2为本发明实施例提供的一种人体测量装置的结构示意图。











