
技术摘要:
本发明公开了一种基于图优化的多站位扫描点云全局配准方法,包括:获取多站位原始三维点云数据,通过布置多站位扫描得到覆盖飞机整机表面的多站位点云数据;基于标靶的初始配准,相邻站位的点云数据通过各视角的标靶完成初始配准;相邻视角点云重叠面积计算,通过栅格 全部
背景技术:
在飞机制造领域,对飞机整机的高精度制造要求在不断的提高,与此同时,对飞机 的精确检测亦变得越来越重要。在过去的很长一段时间内,三坐标测量法以其极高的精度 在精密制造中取得了广泛的应用。然而,在面对飞机这类大尺寸产品时,三坐标测量仪难以 完成对飞机的整体测量。在这样的背景下,三维激光扫描技术应运而生,被广泛应用于获取 物体表面数据,其可在短时间内获取周围场景的点云数据,极大地提高了大尺寸物体的检 测效率。 对于飞机的整体测量而言,可通过三维激光扫描从不同视角获取飞机局部点云数 据,并对飞机局部点云数据进行配准处理。现有技术中,对于多视角点云配准大多采取重复 执行两两配准的方法,数据计算量大,效率低。同时,还容易将每对点云配准的误差累积到 总体误差内,使得配准误差较大。
技术实现要素:
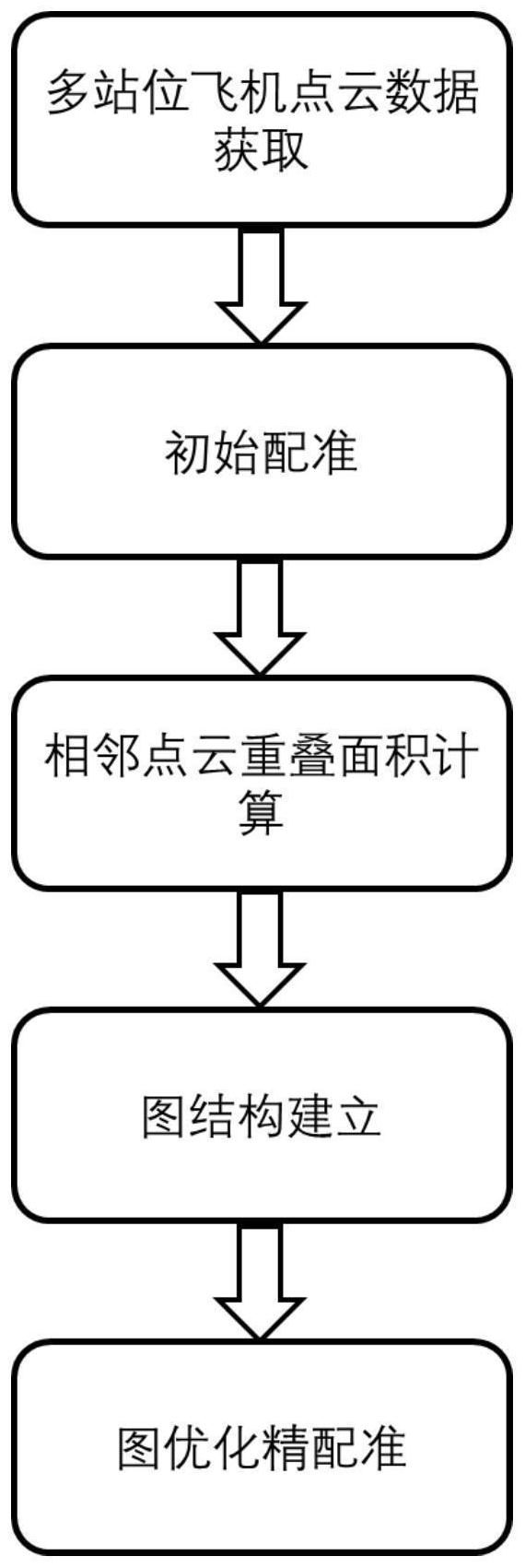
本发明提出一种效率和精度更高的基于图优化的多站位扫描点云全局配准方法。 本发明所采用的技术方案为: 一种基于图优化的多站位扫描点云全局配准方法,包括以下步骤: 步骤1、获取带标靶的多视角原始飞机三维点云数据; 利用三维激光扫描仪在多个站位获取飞机局部点云数据,每个站位在飞机和三维 激光扫描仪之间摆放4个以上十字标靶,作为初始配准的依据; 步骤2、初始配准; 根据相邻站位标靶位置关系进行标靶配对,完成初始配准; 步骤3、相邻点云重叠面积计算; 采用栅格化降采样的方法计算相邻站位点云数据重叠区域点云面积; 步骤4、图结构建立; 以每一站位点云数据作为图结构的节点,相邻站位点云数据的重叠区域点云面积 作为图结构的相邻节点边的权值,建立精配准图; 步骤5、环闭合层级配准; 在精配准图的基础上,得到最大生成树,并得到无环的树结构;通过逐次向最大生 成树添加边而形成环,依次闭合形成的环,实现飞机多视角点云的精配准。 进一步地,步骤1中,十字标靶为可翻转的圆形四等分黑白相间的标志物,十字标 靶中心在翻转时保持位置不变;每个站位在飞机和三维激光扫描仪之间摆放的4个以上十 字标靶中,任意3个十字标靶不共线。 4 CN 111553938 A 说 明 书 2/5 页 进一步地,步骤1中,所述三维激光扫描仪型号为ScanStation P20。 进一步地,步骤2中,初始配准为基于标靶拓扑结构的对应点初始配准,具体为: 以Q={q1,q2,...qn}表示一个视角下的一组标靶,P={p1,p2,...pn}表示相邻视角 下的一组标靶,任一标靶qi所对应的相邻视角的标靶为pi,i=1,2,3,……,n; 通过公式(1)确定两组标靶所在点云的转换矩阵: 公式(1)中,R为两组标靶所在点云的旋转矩阵,t为两组标靶所在点云的平移矩 阵,旋转矩阵和平移矩阵统称为转换矩阵;argmin表示求取表达式 的最 小值,||||2表示欧氏距离,pi和qi分别表示对应视角下的标靶坐标,n表示同一视角下的标 靶数量; 令 求解F(t)的偏导数,得到旋转矩阵: 公式(2)中,令 其中, 和 分别为两组标靶集合P和Q的重心坐标: 两组标靶数据P和Q的重心平移量即为所求两点云的平移量; 平移之后,标靶P的新坐标xi和标靶Q的新坐标yi分别表示为: 将公式(3)带入公式(1)中,得到: 为求解公式(4),首先计算 其中,trace( )表示对矩阵求迹; 对其进行SVD分解可得:H=UΛVT,其中,U、 Λ、V为经过SVD分解后的项;当R=VΛT时,方程(4)取得最小值,从而获得旋转参数R=VΛT; 至此,完成基于标靶的初始配准。 进一步地,步骤3具体包括: 步骤3-1、获取重叠区域点云的包围盒,包围盒三边的方向为该重叠区域点云的三 个主成分方向; 步骤3-2、将包围盒离散成栅格立方体,遍历每个栅格立方体中的点并计算每个点 与对应栅格立方体中心的距离,取每个栅格立方体中离栅格立方体中心最近的点作为采样 点,完成点云降采,实现点云密度均匀化; 步骤3-3、以重叠区域降采样后点的个数作为面积的表达。 进一步地,步骤3-2中,栅格立方体的尺寸为10mm*10mm*10mm。 5 CN 111553938 A 说 明 书 3/5 页 进一步地,步骤5具体包括: 步骤5-1、通过Kruskal算法计算精配准图的最大生成树; 步骤5-2、在得到的最大生成树结构中,计算相邻边的权值之和,在拥有最大权重 之和的边上,添加一个边构成环,并闭合该环,环闭合过程通过ICP方法实现; 步骤5-3、重复步骤5-2,直至没有新的环可以生成,从而完成图优化精配准,得到 完整的飞机整机点云数据。 与现有技术相比,本发明的有益效果在于: 通过多站位扫描得到多视角点云数据后,利用标靶进行初始配准,可高效地完成 大规模点云数据的粗配准,避免了对大量数据的直接运算,提高了整体配准效率。通过改进 的点云重叠面积计算方法实现了飞机点云精配准,克服了飞机点云数据密度不均的影响。 此外,本发明的方法在操作时不易受外界环境的影响及物体尺寸的限制,可在短时间内获 取飞机表面整体数据,并保证数据处理的精度。 本发明的方法经济、实用、检测精度和效率高,可推广用于其他大尺寸产品的检 测。 附图说明 图1为本发明的基于图优化的多站位扫描点云全局配准方法的流程框图; 图2为本发明中,栅格化均匀降采样过程示意图; 图3为本发明中,图优化精配准过程示意图;











