
技术摘要:
本发明公开了一种一体化云台摄像机的光轴校准设备及方法,该设备包括包括处理装置、用于固定镜头和放置枪机的座底、设置于底座上的与处理装置连接的驱动装置和与驱动装置连接的固定装置,其中,处理装置,用于获取镜头和与镜头对应的枪机之间的光轴偏移信息,并依据光 全部
背景技术:
在视频监控领域,随着客户对远距离监控的需求日益提升,一种大变倍直流电动 镜头(简称DC镜头)应运而生。这类镜头的特点是可变焦距较大,并且通常配合枪机和云台 构成云台一体机使用,可满足多角度、远距离的有效监控。 DC镜头在变倍的过程中,监控视场角以光轴为中心放大或缩小,并且枪机和镜头 在安装的过程中,要求光轴要垂直于sensor(图像传感器),其中,sensor设置于枪机内部, 这样在镜头变倍的过程中,画面中心始终和光轴重合,所以处于画面中心的实景物体一直 位于画面中心。如果光轴和sensor的垂线不重合,也即存在光轴偏移时,会导致画面几何中 心和光轴不重合,在镜头变倍的过程中,处于画面中心的实景物体会发生偏移。光轴偏移会 影响很多监控相关业务,例如,广角在画面中心的监控目标,放大到长焦可能不在监控画面 中,影响相机的隐私遮盖或者3D放大功能。另外,一体化云台摄像机夜间一般采用激光补 光,补光要求从广角变倍至长焦,且激光光斑要始终和画面中心重合。如果存在光轴偏移, 处于广角时激光光斑和画面中心重合,那么由广角变倍至长焦后,则激光光斑会偏到画面 之外,完全起不到补光的作用。 因此,对一体化云台摄像机的光轴进行校准是一个重要环节。目前,常用的光轴校 准方法是人工凭经验观测枪机与镜头的位置关系,当认为存在光轴偏移时手动调整枪机与 镜头的垂直度,以使镜头的光轴与枪机中的图像传感器的垂线重合。但是,现有技术中的方 法没有把光轴偏移量化,仅凭人工经验对光轴进行校准,精确度较低,且工作效率低。 鉴于此,如何提供一种解决上述技术问题的一体化云台摄像机的光轴校准设备及 方法成为本领域技术人员需要解决的问题。
技术实现要素:
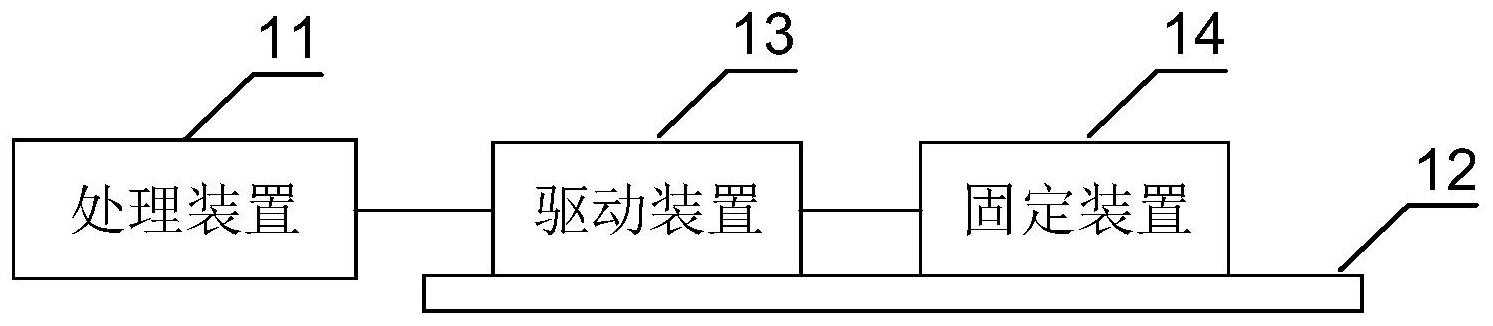
本发明实施例的目的是提供一种一体化云台摄像机的光轴校准设备及方法,在使 用过程中能够提高光轴校准精确度和工作效率。 为解决上述技术问题,本发明实施例提供了一种一体化云台摄像机的光轴校准设 备,包括处理装置、用于固定镜头和放置枪机的座底、设置于所述底座上的与所述处理装置 连接的驱动装置和与所述驱动装置连接的固定装置,其中: 所述处理装置,用于获取所述镜头和与所述镜头对应的枪机之间的光轴偏移信 息,并依据所述光轴偏移信息生成第一控制指令;还用于在将所述枪机移动至相应的目标 位置后生成第二控制指令; 所述驱动装置,用于依据所述第一控制指令对所述枪机的位置进行相应的调节, 将所述枪机移动至所述目标位置处,以使所述镜头的光轴与所述枪机中的图像传感器的垂 6 CN 111614951 A 说 明 书 2/13 页 线重合;还用于依据所述第二控制指令驱动所述固定装置对所述枪机的位置进行固定。 可选的,获取镜头和与所述镜头对应的枪机之间的光轴偏移信息,并依据所述光 轴偏移信息生成第一控制指令的过程为: 获取镜头在最广角时与枪机之间的第一子光轴偏移信息,并依据所述第一子光轴 偏移信息生成第一子控制指令; 在将所述枪机移动至相应的第一子目标位置后,获取镜头在最长焦时与所述枪机 之间的第二子光轴偏移信息,并依据所述第二子光轴偏移信息生成第二子控制指令; 则,所述依据所述第一控制指令对所述枪机的位置进行相应的调节,将所述枪机 移动至相应的目标位置处的过程为: 依据所述第一子控制指令对所述枪机的位置进行相应的调节,将所述枪机移动至 所述第一子目标位置处,以便将所述镜头中的目标物体移动至广角画面的中心位置处; 依据所述第二子控制指令对所述枪机的位置进行相应的调节,并将所述枪机移动 至相应的第二子目标位置处,以便将所述镜头中的目标物体移动至当前最长焦画面的中心 位置处。 可选的,所述获取镜头在最广角时与枪机之间的第一子光轴偏移信息,并依据所 述第一子光轴偏移信息生成第一子控制指令的过程为: 依据校准信息控制所述镜头变倍至最长焦,并控制与所述镜头连接的云台对所述 镜头进行调节,使所述镜头中的目标物体位于长焦画面的中心位置处; 控制所述镜头由所述最长焦变倍至最广角,并获取与所述最广角对应的广角画面 图像信息; 对所述广角画面图像信息进行分析,得到所述目标物体与所述广角画面的中心位 置之间的第一相对位移信息; 依据所述第一相对位移信息生成所述第一子控制指令。 可选的,所述获取镜头在最长焦时与所述枪机之间的第二子光轴偏移信息,并依 据所述第二子光轴偏移信息生成第二子控制指令的过程为: 控制所述镜头由所述最广角变倍至所述最长焦,并获取与所述当前最长焦画面对 应的长焦画面图像信息; 对所述长焦画面图像信息进行分析,计算出所述目标物体与所述当前最长焦画面 的中心位置之间的第二相对位移信息; 依据所述第二相对位移信息生成所述第二子控制指令。 可选的,所述对所述广角画面图像信息进行分析,得到所述目标物体与所述广角 画面的中心位置之间的第一相对位移信息的过程为: 依据所述广角画面图像信息获取所述目标物体在所述广角画面中的第一像素位 置; 依据所述第一像素位置和所述广角画面的中心位置,计算出所述镜头的光轴与所 述广角画面的中心位置之间的第一水平像素偏移量和第一垂直像素偏移量; 依据所述第一水平像素偏移量和所述第一垂直像素偏移量得到所述第一相对位 移信息; 则,所述对所述长焦画面图像信息进行分析,计算出所述目标物体与所述当前最 7 CN 111614951 A 说 明 书 3/13 页 长焦画面的中心位置之间的第二相对位移信息的过程为: 依据所述长焦画面图像信息获取所述目标物体在所述当前最长焦画面中的第二 像素位置; 依据所述第二像素位置和所述当前最长焦画面的中心位置,计算出所述镜头的光 轴与所述当前最长焦画面的中心位置之间的第二水平像素偏移量和第二垂直像素偏移量; 依据所述第二水平像素偏移量和所述第二垂直像素偏移量得到所述第二相对位 移信息。 可选的,所述驱动装置包括水平电机和垂直电机; 所述依据所述第一相对位移信息生成所述第一子控制指令的过程为: 依据电机步长和像素的预设比例关系及所述第一水平像素偏移量和所述第一垂 直像素偏移量分别生成第一水平控制指令和第一垂直控制指令; 所述依据所述第二相对位移信息生成所述第二子控制指令的过程为: 依据所述电机步长和像素的预设比例关系及所述第二水平像素偏移量和所述第 二垂直像素偏移量分别生成第二水平控制指令和第二垂直控制指令; 所述水平电机,用于依据所述第一水平控制指令控制所述枪机在水平方向上移动 第一水平位移,依据所述第二水平控制指令控制所述枪机在水平方向上移动第二水平位 移; 所述垂直电机,用于依据所述第一垂直控制指令控制所述枪机在垂直方向上移动 第一垂直位移,依据所述第二垂直控制指令控制所述枪机在垂直方向上移动第二垂直位 移。 可选的,还包括设有测试图的增距镜,所述测试图中设有预设图案,在所述镜头对 准所述增距镜后,所述预设图案为所述镜头中的目标物体。 本发明实施例还相应的提供了一种一体化云台摄像机的光轴校准方法,应用于如 上述所述的光轴校准设备,包括: 处理装置获取镜头和与所述镜头对应的枪机之间的光轴偏移信息,并依据所述光 轴偏移信息生成第一控制指令; 驱动装置依据所述第一控制指令对所述枪机的位置进行相应的调节,将所述枪机 移动至相应的目标位置处,以使所述镜头的光轴与设置于所述枪机中的图像传感器的垂线 重合; 所述处理装置在所述驱动装置将所述枪机移动至所述目标位置处后,生成第二控 制指令; 所述驱动装置依据所述第二控制指令驱动固定装置对所述枪机的位置进行固定。 可选的,所述获取镜头和与所述镜头对应的枪机之间的光轴偏移信息,并依据所 述光轴偏移信息生成第一控制指令的过程为: 获取镜头在最广角时与枪机之间的第一子光轴偏移信息,并依据所述第一子光轴 偏移信息生成第一子控制指令; 在将所述枪机移动至相应的第一子目标位置后,获取镜头在最长焦时与所述枪机 之间的第二子光轴偏移信息,并依据所述第二子光轴偏移信息生成第二子控制指令; 则,所述依据所述第一控制指令对所述枪机的位置进行相应的调节,将所述枪机 8 CN 111614951 A 说 明 书 4/13 页 移动至相应的目标位置处的过程为: 依据所述第一子控制指令对所述枪机的位置进行相应的调节,将所述枪机移动至 所述第一子目标位置处,以便将所述镜头中的目标物体移动至广角画面的中心位置处; 依据所述第二子控制指令对所述枪机的位置进行相应的调节,并将所述枪机移动 至相应的第二子目标位置处,以便将所述镜头中的目标物体移动至当前最长焦画面的中心 位置处。 可选的,所述获取镜头在最广角时与枪机之间的第一子光轴偏移信息,并依据所 述第一子光轴偏移信息生成第一子控制指令的过程为: 依据校准信息控制所述镜头变倍至最长焦,并控制与所述镜头连接的云台对所述 镜头进行调节,使所述镜头中的目标物体位于长焦画面的中心位置处; 控制所述镜头由所述最长焦变倍至最广角,并获取与所述最广角对应的广角画面 图像信息; 对所述广角画面图像信息进行分析,得到所述目标物体与所述广角画面的中心位 置之间的第一相对位移信息; 依据所述第一相对位移信息生成所述第一子控制指令。 可选的,所述获取镜头在最长焦时与所述枪机之间的第二子光轴偏移信息,并依 据所述第二子光轴偏移信息生成第二子控制指令的过程为: 控制所述镜头由所述最广角变倍至所述最长焦,并获取与所述当前最长焦画面对 应的长焦画面图像信息; 对所述长焦画面图像信息进行分析,计算出所述目标物体与所述当前最长焦画面 的中心位置之间的第二相对位移信息; 依据所述第二相对位移信息生成所述第二子控制指令。 可选的,所述对所述广角画面图像信息进行分析,得到所述目标物体与所述广角 画面的中心位置之间的第一相对位移信息的过程为: 依据所述广角画面图像信息获取所述目标物体在所述广角画面中的第一像素位 置; 依据所述第一像素位置和所述广角画面的中心位置,计算出所述镜头的光轴与所 述广角画面的中心位置之间的第一水平像素偏移量和第一垂直像素偏移量; 依据所述第一水平像素偏移量和所述第一垂直像素偏移量得到所述第一相对位 移信息; 则,所述对所述长焦画面图像信息进行分析,计算出所述目标物体与所述当前最 长焦画面的中心位置之间的第二相对位移信息的过程为: 依据所述长焦画面图像信息获取所述目标物体在所述当前最长焦画面中的第二 像素位置; 依据所述第二像素位置和所述当前最长焦画面的中心位置,计算出所述镜头的光 轴与所述当前最长焦画面的中心位置之间的第二水平像素偏移量和第二垂直像素偏移量; 依据所述第二水平像素偏移量和所述第二垂直像素偏移量得到所述第二相对位 移信息。 可选的,所述驱动装置包括水平电机和垂直电机; 9 CN 111614951 A 说 明 书 5/13 页 所述依据所述第一相对位移信息生成所述第一子控制指令的过程为: 依据电机步长和像素的预设比例关系及所述第一水平像素偏移量和所述第一垂 直像素偏移量分别生成第一水平控制指令和第一垂直控制指令; 所述依据所述第二相对位移信息生成所述第二子控制指令的过程为: 依据所述电机步长和像素的预设比例关系及所述第二水平像素偏移量和所述第 二垂直像素偏移量分别生成第二水平控制指令和第二垂直控制指令; 所述水平电机,用于依据所述第一水平控制指令控制所述枪机在水平方向上移动 第一水平位移,依据所述第二水平控制指令控制所述枪机在水平方向上移动第二水平位 移; 所述垂直电机,用于依据所述第一垂直控制指令控制所述枪机在垂直方向上移动 第一垂直位移,依据所述第二垂直控制指令控制所述枪机在垂直方向上移动第二垂直位 移。 本发明提供了一种一体化云台摄像机的光轴校准设备及方法,该设备包括包括处 理装置、用于固定镜头和放置枪机的座底、设置于底座上的与处理装置连接的驱动装置和 与驱动装置连接的固定装置,其中,处理装置,用于获取镜头和与镜头对应的枪机之间的光 轴偏移信息,并依据光轴偏移信息生成第一控制指令;还用于在将枪机移动至相应的目标 位置后生成第二控制指令;驱动装置,用于依据第一控制指令对枪机的位置进行相应的调 节,将枪机移动至目标位置处,以使镜头的光轴与枪机中的图像传感器的垂线重合;还用于 依据第二控制指令驱动固定装置对枪机的位置进行固定。 可见,本申请中的处理装置能够获取对镜头的光轴和相应枪机之间的光轴偏移信 息,并根据该光轴偏移信息控制驱动装置对枪机的位置进行相应的调节,并将枪机移动至 相应的目标位置处,以使镜头的光轴与枪机中的图像传感器的垂线重合,然后再控制驱动 装置对固定装置进行驱动以对调节好的枪机的位置进行固定,以便在将枪机的位置固定后 再将枪机与镜头进行固定连接,得到经光轴校准后的镜头和枪机一体机。本申请在使用过 程中能够提高光轴校准精确度和工作效率。 附图说明 为了更清楚地说明本发明实施例中的技术方案,下面将对现有技术和实施例中所 需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施 例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获 得其他的附图。 图1为本发明实施例提供的一种一体化云台摄像机的光轴校准设备的结构框图; 图2为本发明实施例提供的一种光轴无偏移时光轴与图像传感器的垂线示意图; 图3为本发明实施例提供的一种光轴偏移时光轴与图像传感器的垂线示意图; 图4为本发明实施例提供的一种光轴偏移校准示意图; 图5为本发明实施例提供的一种一体化云台摄像机的光轴校准设备的局部结构示 意图; 图6为本发明实施例提供的一种测试图示意图; 图7为本发明实施例提供的一种一体化云台摄像机的光轴校准方法的流程示意 10 CN 111614951 A 说 明 书 6/13 页 图。











