
技术摘要:
本发明涉及一种可移动式渔网及其工作方法,其主体为渔网本体,渔网本体中心设有束网座,束网座连接用于收网的拉绳,渔网本体的边缘设有配重体,其设计要点在于所述渔网本体的边缘固定连接由遥控器控制行进方向的水下推进器,水下推进器设有至少三个,且均匀分布于渔网 全部
背景技术:
渔网是一种用于捕鱼的器具,通常是由合成纤维加工而成的网状结构,位于渔网 的中心设有拉绳,方便收网,边缘设有配重体,以实现沉网和聚网的目的。但现有渔网的功 能较为单一,捕鱼时,通常依靠人工技巧和熟练度实现撒网,一旦撒网后,便不易调整渔网 的位置;如果撒网失败,则需要重新收网后再次撒网。显然,这样操作不仅费时费力,且影响 捕鱼的效率和成功率。为此,如果能够实现撒网后对渔网位置调整,则可以提高捕鱼的效率 和成功率,故有待设计一种能够实现撒网后调整的渔网。
技术实现要素:
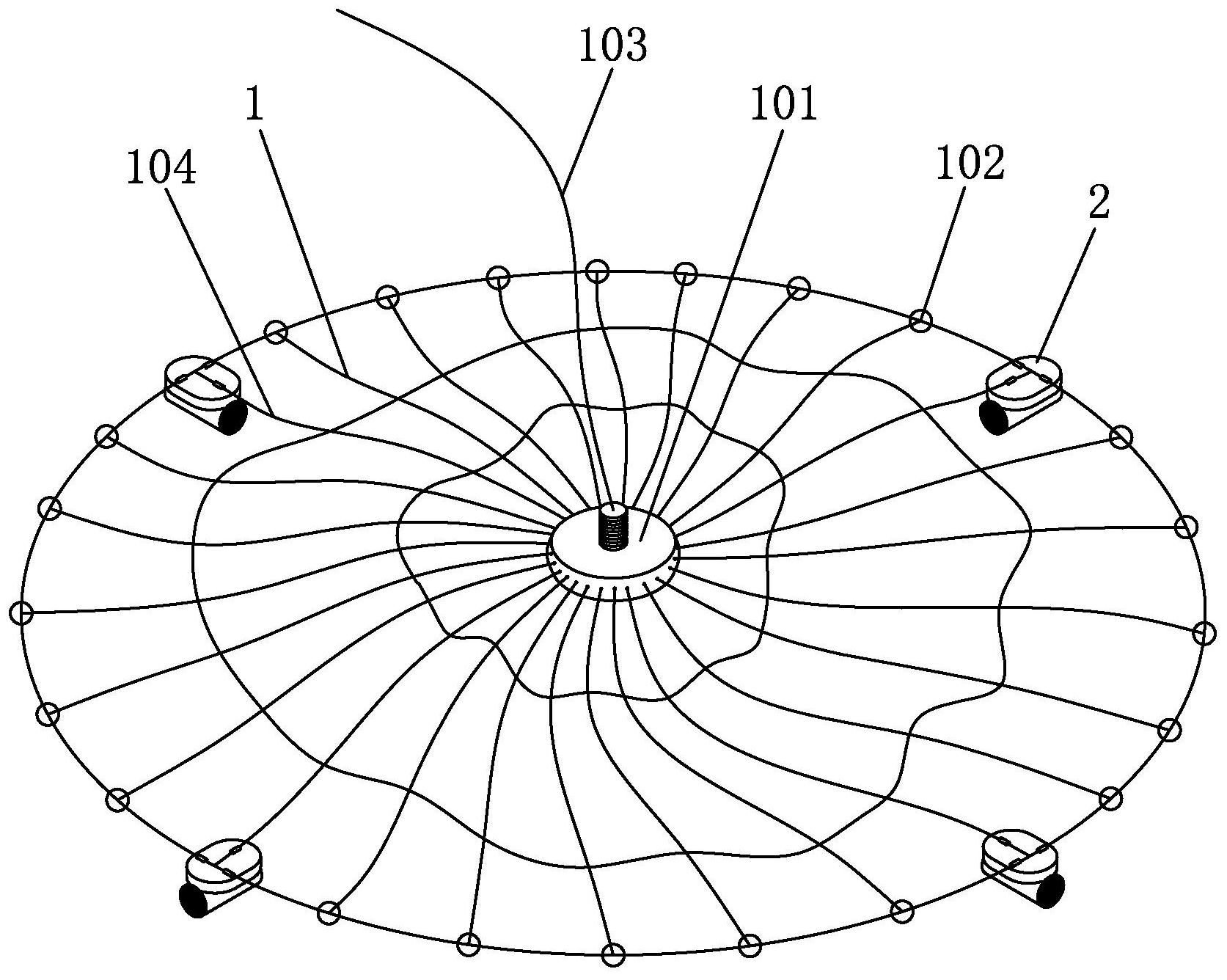
为克服上述不足,本发明的目的是向本领域提供一种可移动式渔网及其工作方 法,使其解决现有渔网撒网后不易调整位置,影响捕鱼效率和成功率的技术问题。其目的是 通过如下技术方案实现的。 一种可移动式渔网,该可移动式渔网的主体为渔网本体,渔网本体中心设有束网 座,束网座连接用于收网的拉绳,渔网本体的边缘设有配重体,其结构要点在于所述渔网本 体的边缘固定连接由遥控器控制行进方向的水下推进器,水下推进器设有至少三个,且均 匀分布于渔网本体边缘。通过遥控器控制水下推进器,实现撒网后渔网的位置调整,操作较 为方便,提高了捕鱼效率和成功率。 所述水下推进器包括罩壳,固定于罩壳内自带电源的遥控接收模块,遥控接收模 块与所述遥控器形成遥控通信连接;所述罩壳内形成一个直通水腔,该直通水腔内安装电 机支架,电机支架固定连接防水电机,防水电机与所述遥控接收模块电连接,并由遥控器控 制正反转,防水电机的输出轴固定连接推进叶片,防水电机周向与直通水腔内壁之间设有 过水通道。该结构为水下推进器的具体结构,水下推进器能实现正推和反推,从而带动渔网 改变其位置或状态。 所述罩壳的直通水腔两端设有防护网罩。通过该结构,防止渔网或杂物进入罩壳 的直通水腔内,保证水下推进器正常稳定工作。 所述罩壳内设有控制所述水下推进器在水中呈水平悬浮状的密封浮腔,密封浮腔 内安装所述遥控接收模块。通过该结构,起到平衡水下推进器的作用,使水下推进器保持水 平状态,以便渔网调整作业。 所述防水电机的输出轴两端均固定连接推进叶片,且两端推进叶片的旋转推进方 向一致。通过该结构,提高推进力。 所述水下推进器与所述渔网本体最外圈的网线之间形成至少两点固定。通过该结 构,使水下推进器相对于渔网的位置较为稳定,使其尽可能相对于束网座形成直线方向的 相对运动。 3 CN 111587848 A 说 明 书 2/3 页 所述水下推进器与所述渔网本体之间为可卸式连接,即水下推进器顶面设有至少 两个用于穿接并夹紧固定所述渔网本体最外圈网线的穿线夹板,穿线夹板与水下推进器之 间通过螺丝固定。通过该结构,方便水下推进器的拆装操作。 所述水下推进器顶面连接三个呈等腰三角分布的穿线夹板,其中两个穿线夹板穿 接渔网本体最外圈网线,且该两个穿线夹板之间的网线与所述束网座之间设有当渔网本体 张开最大时呈直线连接的束网线,该束网线夹紧固定于剩余的穿线夹板中,且渔网本体张 开至最大时,水下推进器推进方向的一端朝向所述束网座。通过该结构,进一步提高水下推 进器工作的稳定性,使其尽可能相对于束网座形成直线方向的相对运动。 所述水下推进器内设有发送方位讯号的方位讯号发送器,所述束网座内设有实时 接收方位讯号发送器发送的方位讯号,并将方位讯号转换为方位参数信息发送至遥控器的 方位讯号收发器,遥控器带有显示屏,且遥控器设有接收方位讯号收发器发送的信息,并处 理该信息后将束网座与各水下推进器相对位置状态模拟显示于显示屏上的信息处理单元。 通过该结构,使水下推进器的操作更为直观,渔网的调整操作更为方便。 该可移动式渔网的工作方法为:将该可移动式渔网撒入捕鱼区域后,通过遥控器 遥控控制各水下推进器,从而带动渔网本体移动至指定区域;当达到指定捕鱼区域后,以所 述渔网本体的束网座为中心,当控制所有水下推进器朝远离束网座的方向运动时,渔网本 体形成张开状态;当渔网本体张开至最大时,停止水下推进器工作,渔网本体在所述配重体 作用下,由边缘逐渐下沉形成网罩状,该状态下,若反向控制所有水下推进器工作,则水下 推进器带动渔网本体的边缘朝内收拢渔网,收拢渔网后,拉动渔网本体束网座的拉绳,即可 收网完成捕鱼操作。 本发明的优点在于:渔网完成撒网后,根据需要调整渔网位置,无需重新收网撒 网,降低劳动强度,操作使用尤为方便,提高了捕鱼的效率和成功率,适合作为可移动式渔 网使用,或同类渔网结构的改进。 附图说明 图1是本发明使用状态结构示意图。 图2是本发明水下推进器的剖视结构示意图。 图3是本发明水下推进器的立体结构示意图,图中部分作了放大示意。 图4是本发明的遥控器结构示意图。 图5是本发明的控制部分示意图。 图中序号及名称为:1、渔网本体,101、束网座,102、配重体,103、拉绳,104、束网 线,2、水下推进器,201、罩壳,202、密封浮腔,203、直通水腔,204、推进叶片,205、防水电机, 206、电机支架,207、遥控接收模块,208、防护网罩,209、穿线夹板,3、遥控器,301、显示屏。











