
技术摘要:
本发明涉及一种网络运营商(OMS)、遥控操作应用(TOApplication)和可遥控操作车辆的应用(TODriver)。所述OMS能够:创建网络切片,用于在至少一条路线上对可遥控操作车辆进行遥控操作;从所述TOApplication接收切片配置请求,所述切片配置请求包括所述至少一条路线对应的Q 全部
背景技术:
遥控驾驶(teleoperated driving,ToD)依赖于一种蜂窝网络,该蜂窝网络用于将 实时视频流和传感器数据从车辆(例如,汽车、卡车、拖拉机、移动式机器人、无人机、触觉反 馈设备、任意其它可移动设备)向远程驾驶员(或远程操作员)发送,并且用于接收远程驾驶 员(或远程操作员)向车辆发送的驾驶命令。为了在当前和未来电信网络中实现ToD,遥控操 作应用(以下称为TOApplication)必须能够配置在蜂窝网络中驾驶所需的合适的服务质量 (quality-of-service,QoS)。根据可用QoS,必须确定在驾驶路线上可用的TOApplication 的功能或配置以及驾驶相关参数(例如,速度、所选路线等)。例如,存在四个视频流,这四个 视频流可以对应于车辆的前视图、两侧视图和后视图并在蜂窝上行链路上传输,数据速率 可以很容易地达到每秒几十兆位。然而,时变无线信道会使TOApplication的可用数据速率 产生波动,由此可能会削弱视频流,从而可能危及车辆安全。为了解决这个问题,可能需要 TOApplication中存在一种机制,将遥控操作配置(以下称为TeleConfiguration(TC))转换 为蜂窝网络能够理解的合适的QoS要求。TC包括遥控操作系统组件的硬件设置和软件设置, 例如,摄像头和/或视频流的配置、LiDAR或超声波传感器等附加传感器的配置、触觉反馈配 置。TC直接映射到通信系统的QoS要求,这种映射基于上述遥控操作系统组件的硬件能力和 软件能力。因此,这种映射很可能依赖于车辆中的遥控操作系统组件。 然而,这些合适的QoS要求基于每辆车,而网络运营商(例如,运营管理系统 (operator management system,OMS)是基于每个应用或每个终端客户来创建切片的。切片 被定义为网络功能和这些网络功能对应的资源的集合,对这些网络功能和资源进行编排以 满足切片要提供的服务的要求(例如,QoS要求)(3GPP TR 28.801)。因此,网络运营商需要 一种方法,将车辆的预期使用及其各自的时间相关和路线相关的QoS要求合并为针对该切 片进行实例化的整体QoS要求。 一旦切片已经通过具体Qo S参数进行了实例化并由网络运营商返回给 TOApplication,则网络运营商需要继续监测该切片,以便查看车辆行驶的路径是否满足所 提供的QoS参数。问题是,如果无法满足所提供的QoS参数,则TOApplication将使用错误的 TC来驾驶车辆,至少导致驾驶体验差,最严重的是存在安全隐患。因此,网络运营商需要主 动将所提供的QoS参数的变化通知给TOApplication,并提供可接受的备选QoS参数,以确保 遥控驾驶的安全性。 文件US-9507346-B1公开了一种用于自动驾驶车辆轨迹修改的遥控操作系统和方 法,涉及一种ToD核心控制系统。但是,本文没有描述通信系统性能和QoS参数的影响。 文件US-9494935-B2公开了自动驾驶车辆在意外环境中的遥控操作,其中,车辆传 感器可以捕捉关于车辆和意外驾驶环境的数据。所捕捉的数据不仅包括反馈图像,还包括 雷达数据和激光雷达数据。所捕捉的数据可以发送给远程操作员。远程操作员可以手动远 4 CN 111602416 A 说 明 书 2/9 页 程操作车辆,也可以向自动驾驶车辆下发命令,这些命令将由各种车辆系统执行。 A .Hosseini和M .Lienkamp在2016年的IEEE智能车辆讨论会上发表的标题为 “Predictive safety based on track-before-detect for teleoperated driving through communication time delay(基于通过通信时延的遥控驾驶的检测前跟踪的预测 安全)”的会议论文公开了一种使用检测前跟踪技术来预测动态对象的未来轨迹的车辆,其 中,通过危险预测来补偿通信时延,从而使人工操作员始终是控制环路中的主要决策者。但 是,本文没有描述通信链路质量的补偿和预测。 文件US-8259566-B2公开了一种闭环QoS系统,该系统在物理层、数据链路层和网 络层实时收集网络KPI,并且根据用户定义的优先级和策略,动态控制网络流量以提高性 能。闭环QoS系统监测抖动和带宽,以便仅通过动态重新分配通信链路带宽来适应网络基础 设施。但是,本文没有描述为了实时适应网络条件ToD配置或路径发生的变化。
技术实现要素:
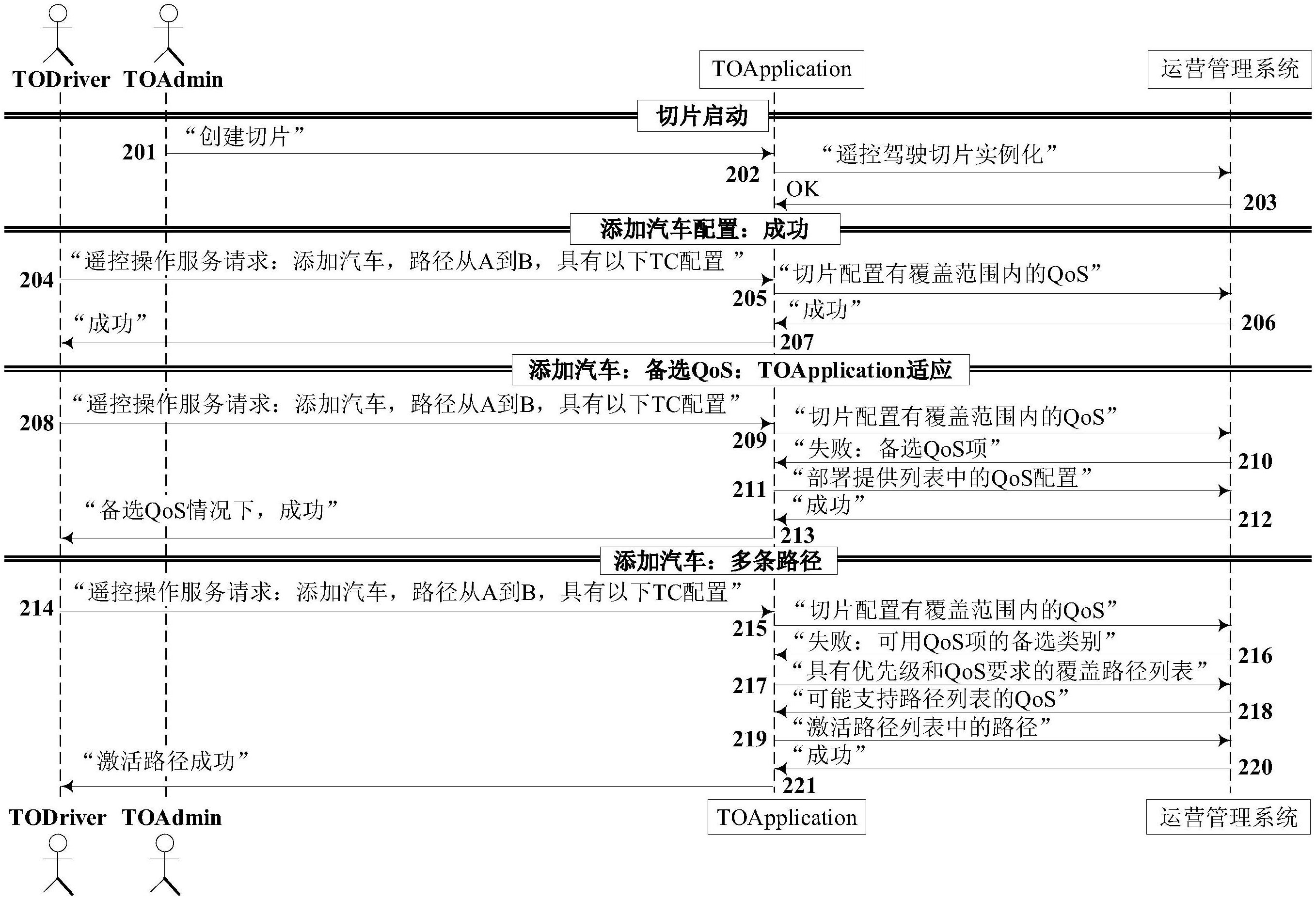
因此,本发明的目的是提供一种支持遥控驾驶的电信系统,尤其通过兼顾网络和 车域以及它们的互通性,从而在整个驾驶过程中和地理路线上保证通信服务质量 (quality-of-service,QoS)。 此目的可以通过独立权利要求的特征来实现。根据从属权利要求、说明书和附图, 本发明的其它实施例是显而易见的。 根据第一方面,本发明涉及一种网络运营商(OMS)。所述网络运营商可以用于:创 建网络切片,用于在至少一条路线(R)上对可遥控操作车辆(v)进行遥控操作;从遥控操作 应用(TOApplication)接收切片配置请求,所述切片配置请求包括所述至少一条路线(R)对 应的服务质量(quality-of-service,QoS);配置所述网络切片,以支持所述至少一条路线 (R)对应的所述QoS。 根据所述第一方面的一种实施形式,所述网络运营商(OMS)可以用于:通过监测对 应于所需QoS的性能指标(KPI),监测所述网络切片。 根据所述第一方面的又一种实施形式,所述网络运营商(OMS)可以用于:将所述网 络切片,尤其是将所述网络切片的一个或多个参数,通知给所述TOApplication。例如,所述 参数可以是与车辆有关或与所述网络切片本身的配置有关的QoS的变化。 根据所述第一方面的又一种实施形式,所述网络运营商(OMS)可以包括预测模块 并且用于:在所述预测模块侧收集所述网络切片的当前和/或历史监测数据;根据所述网络 切片的所述当前和/或历史监测数据,预测所述网络切片支持的所述QoS的变化;将所述预 测变化通知给所述TOApplication。 根据第二方面,上述目的也得到解决。 根据所述第二方面,本发明涉及一种遥控操作应用(TOApplication)。所述遥控操 作应用(TOApplication)可以用于:向网络运营商(OMS),尤其如所述第一方面和/或所述第 一方面的所述实施形式中任一种所述,发送创建网络切片的请求,所述网络切片用于在至 少一条路线(R)上对可遥控操作车辆(v)进行遥控操作;从所述可遥控操作车辆(v)接收遥 控操作服务请求,其中,所述遥控操作服务请求包括遥控操作配置(tck)集合(TC);将每个 遥控操作配置(tck)映射到相应QoS;向所述OMS发送包括所述QoS的切片配置请求。所述 5 CN 111602416 A 说 明 书 3/9 页 TOApplication可以位于网络中,例如,可以分散地运行在所述网络中的不同实体上。 根据所述第二方面的一种实施形式,所述遥控操作配置(tck)集合(TC),尤其是所 述集合(TC)中的每个遥控操作配置(tck),在预定义时间段内是有效的。 根据所述第二方面的又一种实施形式,所述遥控操作应用(TOApplication)可以 用于:从所述网络运营商(OMS)接收关于所述网络切片的通知,所述网络切片尤其如所述第 一方面的又一种实施形式所述。 根据所述第二方面的又一种实施形式,所述遥控操作应用(TOApplication)可以 用于:从所述网络运营商(OMS)接收关于预测变化的通知,所述预测变化尤其如所述第一方 面的又一种实施形式所述。 根据第三方面,上述目的也得到解决。 根据所述第三方面,本发明涉及一种可遥控操作车辆(v)应用。所述应用可以用 于:向遥控操作应用(TO A p pl i ca ti o n)发送遥控操作服务请求;根据来自所述 TOApplication的信息,控制所述可遥控操作车辆(v)要遵循的路线(R)。 根据所述第三方面的一种实施形式,所述遥控操作服务请求包括遥控操作配置 (tck)集合(TC)。 根据第四方面,上述目的也得到解决。 根据所述第四方面,本发明涉及一种方法。所述方法由网络运营商(OMS)执行并且 可以包括以下步骤:创建网络切片,用于在至少一条路线(R)上对可遥控操作车辆(v)进行 遥控操作;从遥控操作应用(TOApplication)接收切片配置请求,所述切片配置请求包括所 述至少一条路线(R)对应的服务质量(quality-of-service,QoS);配置所述网络切片,以支 持所述至少一条路线(R)对应的所述QoS。 根据所述第四方面的一种实施形式,所述方法可以包括以下步骤:通过监测对应 于所需QoS的性能指标(KPI),监测所述网络切片。 根据所述第四方面的又一种实施形式,所述方法可以包括以下步骤:将所述网络 切片,尤其是将所述网络切片的一个或多个参数,通知给所述TOApplication。 根据所述第四方面的又一种实施形式,所述方法可以包括以下步骤:在预测模块 侧收集所述网络切片的当前和/或历史监测数据;根据所述网络切片的所述当前和/或历史 监测数据,预测所述网络切片支持的所述QoS的变化;将所述预测变化通知给所述 TOApplication。 根据第五方面,上述目的也得到解决。 根据第五方面,本发明涉及一种方法。所述方法由遥控操作应用(TOApplication) 执行并且可以包括以下步骤:向网络运营商(OMS),尤其如所述第一方面和/或所述第一方 面的所述实施形式中的任一种所述,发送创建网络切片的请求,所述网络切片用于在至少 一条路线(R)上对可遥控操作车辆(v)进行遥控操作;从所述可遥控操作车辆(v)接收遥控 操作服务请求,其中,所述遥控操作服务请求包括遥控操作配置(tck)集合(TC);将每个遥 控操作配置(tck)映射到相应QoS;向所述OMS发送包括所述QoS的切片配置请求。 根据所述第五方面的一种实施形式,所述方法可以包括以下步骤:从所述OMS接收 关于所述网络切片的通知,所述网络切片尤其如所述第一方面的又一种实施形式所述。 根据所述第五方面的又一种实施形式,所述方法可以包括以下步骤:从所述OMS接 6 CN 111602416 A 说 明 书 4/9 页 收关于预测变化的通知,所述预测变化尤其如所述第一方面的又一种实施形式所述。 根据第六方面,上述目的也得到解决。 根据所述第六方面,本发明涉及一种方法。所述方法由可遥控操作车辆(v)应用执 行并且可以包括以下步骤:向遥控操作应用(TOApplication)发送遥控操作服务请求;根据 来自所述TOApplication的信息,控制所述可遥控操作车辆(v)要遵循的路线(R)。 根据第七方面,上述目的也得到解决。 根据所述第七方面,本发明涉及一种计算机可读存储介质,其上存储程序代码,以 供网络运营商(OMS)、遥控操作应用程序(TOApplication)和可遥控操作车辆(v)的应用中 的任一个使用。所述程序代码在由所述网络运营商(OMS)使用时包括执行根据所述第四方 面及其相应实施形式中任一种所述的方法的指令,在由所述遥控操作应用程序 (TOApplication)使用时包括执行所述第五方面及其相应实施形式中任一种所述的方法的 指令,在由所述可遥控操作车辆(v)的应用使用时包括执行所述第六方面及其相应实施形 式中任一种所述的方法的指令。因此,所述方法可以通过自动和可重复的方式执行。 所述计算机程序可以由上述装置执行。 更具体地,需要说明的是,所有上述装置都可以基于具有分立硬件组件的分立硬 件电路、集成芯片或芯片模块装置来实现,或者基于由存储在存储器中的写入计算机可读 介质或从因特网等网络下载的软件例程或程序控制的信号处理设备或芯片来实现。 还应理解,本发明的优选实施例也可以是从属权利要求或上述实施例与相应的独 立权利要求的任何组合。 下面将结合下述实施例清楚明了地阐释本发明的这些和其它方面。 附图说明 在本发明的以下详述部分中,将结合附图中所示的示例性实施例来更详细地解释 本发明,其中: 图1示出了根据本发明实施例的包括用于遥控驾驶的网络切片(图中示为遥控操 作切片)的电信系统100的示意图; 图2示出了根据本发明实施例的第一阶段和第二阶段的消息序列图(message sequence chart,MSC),第一阶段启动网络切片,第二阶段配置启动网络切片以支持以下三 种可能场景中的QoS; 图3示出了根据本发明实施例的不能再满足监测到的性能指标(例如,KPI)时网络 运营商(图中示为OMS)与TOApplication之间的网络感知驾驶反馈环路,其中,(a):不向 TOApplication请求切片重配置,(b):向TOApplication请求切片重配置; 图4示出了根据本发明实施例的OMS在网络切片的覆盖范围内监测和通知QoS预 测; 图5示出了根据本发明实施例的可遥控操作车辆在两个候选地理路线(路线1、路 线2)上的点对点遥控驾驶的地理图; 图6示出了根据本发明实施例的系统配置参数及其关联值; 图7示出了根据本发明实施例的以下内容的示例性表示:(a)地理路线上的七个支 持TC的TC集合(Tv)的格式,每个TC具有相应的时长t,(b)使用q功能的相应TC到QoS映射, 7 CN 111602416 A 说 明 书 5/9 页 (c)所选路线1上的每个子路线对应的每个BS的可用限时QoS; 图8为根据本发明实施例的协商/保证/保留QoS配置所基于的网络配置信息汇总 表。 相同附图标记用于表示相同的或至少功能上等同的特征。











