
技术摘要:
本发明提供了一种工业机器人,包括基体总成、加长臂组件和前臂总成;所述基体总成包括肘部壳体以及固定安装于所述肘部壳体的前端止口的中空型减速机;所述加长臂组件的轴向的第一端通过第一螺钉固定安装在所述减速机的输出端,所述前臂总成通过第二螺钉固定安装在所述 全部
背景技术:
工业机器人是现代制造业重要的自动化装备,目前已广泛应用在CNC(Computer numerical control,计算机数字控制机床)上下料、手机壳打磨、金属打磨等领域。目前,以 工业机器人为核心的制造装备的需求日益加大。 工业机器人由本体、驱动系统和控制系统三个基本部分组成,其中,本体即机座和 执行机构,包括臂部、腕部和手部。现有的一些工业机器人,往往因其臂部长度,导致其工作 半径有限,限制了工业机器人的工作能力和使用范围。通过在工业机器人的原有本体结构, 特别是臂部,增加加长部件,可在有效增加工业机器人臂长及其工作半径的同时,缩短工业 机器人开发周期,降低开发成本。 然而,上述加长部件往往无法灵活增减,且上述为增加臂长而增加的零件会引入 装配误差,从而影响整机的精度(包括零点位置、定位精度等),整机的美观性也会变差。并 且受工业机器人美观、加长臂及其连接件结构要求和工业机器人轻量话、小型化的限制,导 致工业机器人内部走线困难,相应位置的线缆走线难度也会加大。此外,加长臂如采用铸造 方式制造,铸件内部如有缺陷或毛刺,将加重线缆磨损情况。
技术实现要素:
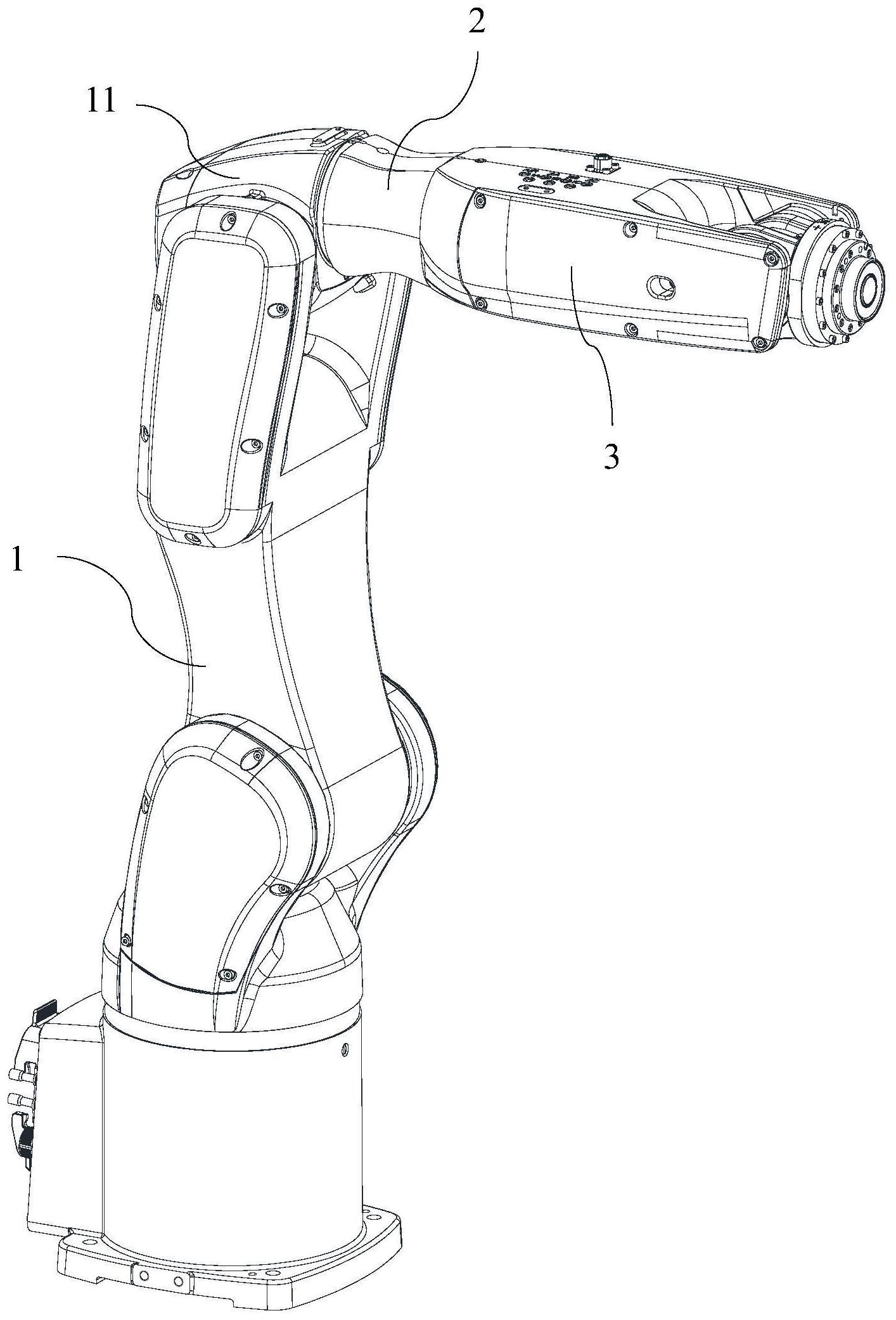
本发明实施例针对上述为增加工业机器人臂长而增加的零件无法灵活增加,并会 引入装配误差、导致内部走线困难以及加重线缆磨损的问题,提供一种新的工业机器人。 本发明实施例解决上述技术问题的技术方案是,提供一种工业机器人,包括基体 总成、加长臂组件和前臂总成;所述基体总成包括肘部壳体以及固定安装于所述肘部壳体 的前端止口的中空型减速机;所述加长臂组件的轴向的第一端通过第一螺钉固定安装在所 述减速机的输出端,所述前臂总成通过第二螺钉固定安装在所述加长臂组件的轴向的第二 端,且所述加长臂组件的轴向的第一端的安装面与所述前臂总成的安装面相同,所述加长 臂组件的轴向的第二端的安装面与所述减速机的输出端的安装面相同。 优选地,所述工业机器人还包括安装固定在所述肘部壳体或所述加长臂组件的第 一过线套,所述第一过线套的主体部分穿过所述减速机的内孔,且所述第一过线套的外壁 与所述减速机的内孔的内壁之间具有间隙。 优选地,所述加长臂组件包括加长臂主体,且所述加长臂主体的第一端具有第一 开口以及位于所述第一开口内侧的凸环部;所述第一开口与所述减速机的刚柔轮的形状和 尺寸相适配,所述凸环部由所述加长臂主体的内壁向中心延伸形成,且所述凸环部上具有 第一安装孔;所述加长臂主体的第一开口套于所述减速机的输出端外,且所述加长臂主体 通过穿过所述第一安装孔的第一螺钉固定在所述减速机的刚柔轮上。 优选地,所述加长臂组件包括固定板,且所述固定板通过所述第一螺钉固定在所 4 CN 111546314 A 说 明 书 2/5 页 述凸环部;所述固定板上具有第一通孔,所述第一过线套的主体部分的一端具有第一安装 沿,且所述第一过线套的主体部分穿过第一通孔后,通过所述第一安装沿固定安装在所述 固定板上。 优选地,所述工业机器人还包括第二过线套,所述第二过线套固定在所述加长臂 组件内,且所述第二过线套的主体部分位于所述第一过线套的主体部分的延长线上。 优选地,所述加长臂组件包括加长臂主体以及连接板,且所述加长臂主体的第二 端具有第二开口;所述连接板安装固定在所述第二开口的内侧,所述前臂总成通过第二螺 钉固定安装在所述连接板的朝向所述前臂总成的端面上,且所述连接板的朝向所述前臂总 成的端面的形状和尺寸与所述减速机的刚柔轮的形状和尺寸相同。 优选地,所述连接板包括突出于所述连接板的外壁的第二安装沿,且所述第二安 装沿包括第二安装孔和第一销孔,所述加长臂主体的第二端与所述第一销孔对应的位置设 有第二销孔,且所述连接板通过插接在所述第一销孔和第二销孔的第一销钉对位安装,并 通过穿过所述第二安装孔的螺钉固定安装在所述加长臂主体上。 优选地,所述连接板的朝向所述前臂总成的一端的端面具有第三销孔,所述前臂 总成的安装面具有与所述第三销孔对应的第四销孔,且所述前臂总成通过插接在所述第三 销孔和第四销孔的第二销钉对位安装。 优选地,所述第二过线套包括突出于所述第二过线套的主体部的外壁的第三安装 沿,且所述第二过线套通过所述第三安装沿固定安装在所述连接板的远离所述前臂总成的 端面上。 优选地,所述连接板的朝向所述前臂总成的端面突出于所述第二安装沿的端面, 所述前臂总成包括还绕在所述第二安装沿的外侧的凸沿。 本发明实施例的工业机器人,通过使加长臂组件的轴向的两端的端面分别与前臂 总成的安装面以及减速机的输出端的安装面相同,在增加工业机器人臂长、有效增加其工 作半径的同时,提高工业机器人组装的灵活性。并且,本发明实施例还通过在加长臂组件内 增加过线套,改善了工业机器人内部走线,并解决线缆磨损严重的问题。此外,本发明实施 例还通过合理的装配结构,使工业机器人兼顾了美观的同时,保证了工业机器人的装配精 度。 附图说明 图1是本发明实施例提供的工业机器人的结构示意图; 图2是本发明实施例提供的工业机器人的加长臂的剖面结构示意图; 图3是本发明实施例提供的工业机器人的加长臂的第二端的结构示意图。











