
技术摘要:
本发明公开了一种基于短相干光源干涉仪的大行程光程匹配装置及实验方法,使用短相干光源可以消除光学元件前后表面反射形成的杂散光的特性,进行高精度的测量,但是只有当两支光接近零光程位置时才能干涉,此时需要对两只光进行补偿。本发明利用多组角锥棱镜通过一定的 全部
背景技术:
进入二十一世纪,光学为社会的发展,新型产业的诞生注入了活力。平面与球面光 学元件作为光学系统里最常用的光学元件,被广泛应用在各个领域里,尤其是航天、天文、 军事、医疗等最为突出。以大口径平面镜和微小球面为代表的高端光学设备,对光学元件的 加工、光学系统的集成提出了极大的挑战。对于光学元件的加工,传统的面形检测方法包括 刀口法、哈特曼传感器法、瑞奇康忙法、子孔径拼接法、五棱镜扫描法等。这些方法存在着损 伤待测件或是以主观经验为评判标准,并非数字化的弊端,在精度非常欠妥。而干涉仪作为 一种非接触的测量装置,通过引入通信理论中的移相技术,已成为测量面形和折射率变化 等物理量的重要和常用的手段。 短相干光源模块中由于短相干光源的自身相干长度较短,两支光只有在接近零光 程位置时才会发生干涉产生干涉条纹。由于干涉仪在测量时,标准镜和待测件之间具有一 定的间距,因此光源位置需要通过一定的方式进行光程匹配,实验中采用角锥进行光程的 折叠。角锥棱镜有三个互相垂直的直角面,入射的光线在三个直角面上形成全反射,并保持 原方向返回,无论入射角是多少,反射光始终与入射光平行。角锥棱镜具有高效的反射效 率,理想情况下角锥棱镜可以将入射光高效的按原方向返回去,通过改变角锥棱镜的入射 位置使可以使入射光与反射光产生一定的横向和纵向的偏移。 当对于大口径平面镜进行检测时,随着口径的增大,推动待测镜改变腔长将成为 一件艰巨的事情,且会破坏腔的稳定性,此时改变光源模块的两支短相干光的光程差来匹 配腔长可以减小工作量。而对于一些特定的光学元件物理量的测量,比如用来测量球面元 件曲率半径时,需要较长的干涉腔长度,在高度集成化的光源模块里进行匹配腔长也时一 个挑战。所以,此时在两支短相干光的其中一支加入大行程光程匹配模块可以有效的解决 这个问题。
技术实现要素:
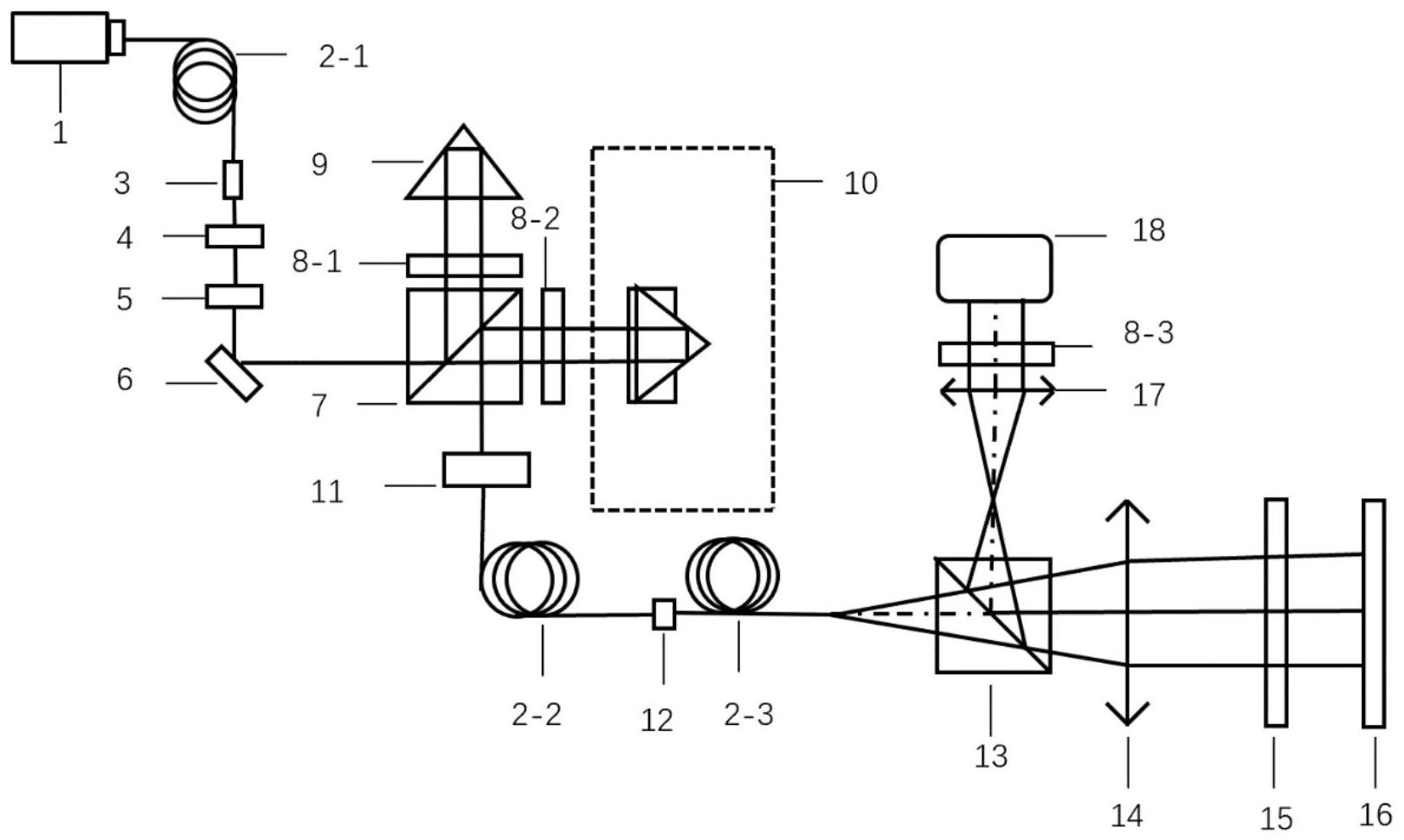
本发明的目的在于提供一种基于短相干光源干涉仪大行程光程的匹配装置及实 验方法,能够在高度集成的光源模块里,短时间内准确匹配0-5m的任意干涉腔长,并能够在 偏振CCD相机获取没有其他杂散条纹的干涉图。 实现本发明目的的技术解决方案为:一种基于短相干光源干涉仪的大行程光程匹 配装置,包括光源模块、干涉模块和成像模块;其中光源模块包括短相干激光器、第一保偏 光纤、光纤准直器、起偏器、半波片、反射镜、偏振分光棱镜、第一四分之一波片、第二四分之 一波片、角锥棱镜、大行程光程匹配模块、光纤耦合器、第二保偏光纤、光纤匹配套管、第三 保偏光纤;干涉系统包括分光棱镜、准直透镜、参考镜和待测镜;成像模块包括成像透镜、第 4 CN 111578832 A 说 明 书 2/4 页 三四分之一波片、偏振CCD相机; 共第一光路依次布置光纤准直器、起偏器、半波片、反射镜,共第二光路依次布置 反射镜、偏振分光棱镜和大行程光程匹配模块,共第三光路依次布置角锥棱镜、第一四分之 一波片、偏振分光棱镜和光纤耦合器,共第四光路依次布置分光棱镜、准直透镜、参考镜和 待测镜,共第五光路依次布置偏振CCD相机、第三四分之一波片、成像透镜和分光棱镜; 短相干激光器的输出端与第一保偏光纤一端连接,第一保偏光纤另一端接入光纤 准直器,保证出射的光为空间准直光,准直光依次经过起偏器、半波片产生线偏光,通过反 射镜折转光路进入偏振分光棱镜,再经由偏振分光棱镜将线偏光分解为第一透射光和第一 反射光,第一透射光即p光,第一反射光即s光;s光经过与第一四分之一波片变换为方向相 反的圆偏光,经角锥棱镜反射,再次通过第一四分之一波片时,圆偏光再次变为线偏光;p光 经过第二四分之一波片变换为方向相反的圆偏光,经大行程光程匹配模块反射,再次通过 第二四分之一波片后,圆偏光也再次变为线偏光;原来在偏振分光棱镜反射的s光变为第一 p光,透射的p光变为第一s光,此时第一p光与第一s光在偏振分光棱镜上汇聚进入光纤耦合 器耦合进入第二保偏光纤,第二保偏光纤通过光纤匹配套管与第三保偏光纤连接,让汇聚 耦合的光进入干涉模块;所述耦合光经分光棱镜分解为第二透射光和第二反射光,第二透 射光经准直透镜准直,通过参考镜后表面和待测镜的前表面反射光汇聚通过分光棱镜分解 为第三反射光和第三透射光,第三反射光进入成像模块,先通过成像透镜,再经过第三四分 之一波片,最终在偏振CCD相机靶面上成像。 一种基于短相干光源干涉仪大行程光程的匹配装置的实验方法,步骤如下: 步骤一、打开短相干激光器,将第一保偏光纤接入准直器里,依次调节起偏器、半 波片、反射镜的位置,通过调节光纤耦合器将空间准直光耦合进入第二保偏光纤; 步骤二、测量记录参考镜后表面和待测镜的前表面之间距离L,通过平移台将大行 程光程匹配模块移动到使第一透射光和第一反射光的光程差为L附近; 步骤三、通过计算机同时控制偏振CCD相机与平移台,设置平移台进行定步长移 动,每次移动后通过偏振CCD相机采集所获取的图像并读取其中一点的灰度值保存; 步骤四、观察灰度值,当发生突变时即为零光程位置,也是光程匹配最佳位置; 步骤五、移动平移台至目标位置,通过偏振CCD相机获取短相干干涉条纹图,并用 四步移相算法进行解算。 本发明与现有的技术相比,其显著优点在于: (1)无需推动待测镜改变干涉仪腔长,仅需在光源模块调节两支光光程差便可; (2)通过加入大行程光程匹配模块,可在极小的空间里获取较大的光程,让光源模块变得高 度集成;(3)采用短相干光源,避免系统内光学元件形成的杂纹对测量结果的影响,克服了 传统干涉仪系统噪声的问题;(4)光源模块具有0-5m的自由光程调节量,可让一个光源适用 于多种口径、多种腔长的干涉仪,打破了传统干涉仪的一个光源只适用于一个干涉模块的 单调格局; 附图说明 图1为本发明基于短相干光源干涉仪的大行程光程匹配装置的光路图。 图2为角锥阵列示意图。 5 CN 111578832 A 说 明 书 3/4 页 图3为保偏光纤环形器示意图。 图4为延迟线扫描过程示意图,其中的灰度值突变位置即为光程差匹配成功位置。











