
技术摘要:
本发明公开了一种自适应巡航控制系统性能测评方法。首先,面向高等级公路,建立了基于前车车速时变的自适应巡航控制系统性能测试场景。其次,为了全面、准确的获取测试过程中的车辆运动参数,在方法论层面对测试方法进行了改进,利用改进的自适应卡尔曼滤波算法对车辆 全部
背景技术:
随着我国通车里程的不断增加和汽车保有量的爆发性增长,交通运输发展面临着 既要提供覆盖面更广的均等化公共服务,又要保障道路交通安全、高效的双重压力。在这样 的背景下,以提升交通运输安全和汽车智能化水平为目的的高级驾驶辅助系统(Advanced Driving Assistance System,ADAS)成为了国内外研究的重点。 作为ADAS的重要组成部分,自适应巡航控制系统(Adaptive Cruise Control , ACC)实现了定速巡航和跟车控制辅助功能,能够有效减轻驾驶员的负担,为驾驶员提供辅 助支持,同时保障行车安全。为了确保ACC功能的完整性和可靠性,针对ACC功能、性能的测 试评价成为了ADAS测评的重要环节,同时也是保障智能驾驶汽车安全上路的前提。 为此,国内外制定了一系列标准、规范对ACC进行测试评价。西方发达国家出台了 一系列政策法规,如ISO 15622《智能运输系统—自适应巡航控制系统—性能要求和试验规 程》、ISO 22179《智能运输系统—全速范围自动适配巡航系统—性能要求和试验规程》等标 准对ACC的测试场景、测试方法和通过标准作出了规定,但这些标准仅考虑了稳定跟车、前 车减速等相对简单的测试场景,与实际的行驶工况存在差异,不能较好的反映出实际交通 环境下ACC性能的优劣。 同时,我国也制定了相关的国家标准,GB/T 20608-2006标准《智能运输系统—自 适应巡航控制系统—性能要求与检测方法》对ACC的测试评价作出了明确的规定,但该标准 仅针对ACC的探测距离、目标识别能力和弯道适应能力进行了功能测试,未涉及复杂测试场 景下ACC性能的定量测评。在测评机构层面,i-VISTA《自适应巡航控制系统评价规程》针对 ACC的测试场景和测试方法作出了规定,并根据安全和体验两个维度计算评价等级,但该测 试规程仅利用优秀、良好、一般、较差四个等级评价ACC的性能,未针对安全、稳定性等因素 对ACC性能做定量评价。可以看出,针对ACC性能的测试评价,目前尚缺乏面向复杂测试场景 的性能测试方法和评价指标,特别是缺乏复杂测试场景下的高精度、全面、可靠的ACC性能 定量测评研究。
技术实现要素:
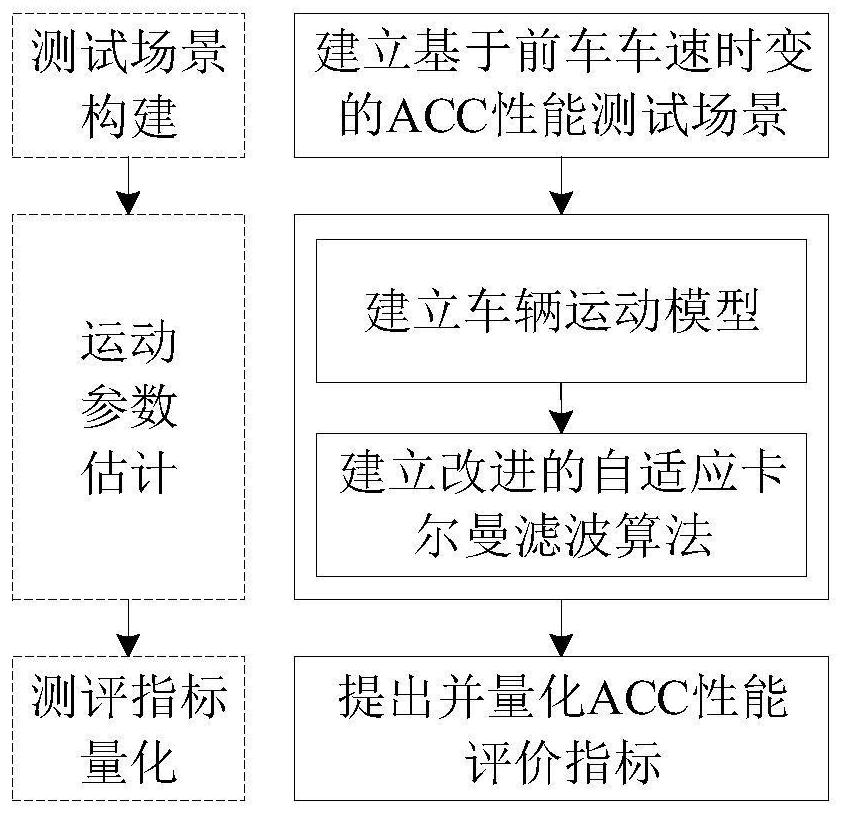
发明目的:针对ACC测试场景简单、测评指标相对单一的问题,本发明公开了一种 面向前车车速时变场景的ACC性能测评方法。该方法基于实际道路试验,能够高精度、全面 的测量车辆运动状态参数,量化并输出了多维度的ACC性能评价指标,实现了复杂场景下 ACC性能高精度、可靠、全面的科学定量测评。 技术方案:本发明针对自适应巡航控制系统,提出了一种面向前车车速时变场景 的ACC性能测评方法。首先,面向高等级公路,建立了基于前车车速时变的自适应巡航控制 6 CN 111595592 A 说 明 书 2/12 页 系统性能测试场景。其次,为了全面、准确的获取测试过程中的车辆运动参数,在方法论层 面对测试方法进行了改进,利用改进的自适应卡尔曼滤波算法对车辆的位置、速度等运动 状态参数进行精确估计。最后,基于准确递推的车辆运动状态参数,提出了多维度的自适应 巡航控制系统性能评价指标并进行量化,构建了自适应巡航控制系统性能评价指标体系。 包括以下步骤: 步骤一:建立基于前车车速时变的ACC性能测试场景 为了适应实际交通场景中前车速度、加速度等运动状态时变的特性,使测试场景 尽可能符合实际跟车运行特点,本发明建立了基于前车车速时变的ACC性能测试场景。 首先,选取双车道的高等级公路作为试验场地。其次,建立基于前车车速时变的 ACC性能测试场景。具体描述如下: 前车位于试验道路的中间,以一定的速度直线行驶。被测车辆以某设定速度逐渐 靠近前车,当两车间距等于设定值时,开始进行测试。在测试过程中,同步测量被测车辆、前 车的位置、速度等基础性运动状态信息。前车进行加速运动,被测车辆在ACC的控制下加速 并跟随前车行驶。随后,前车进行减速运动,再进行加速运动。最后,前车逐渐减速直至静 止,被测车辆在ACC的控制下减速并跟随前车行驶。当被测车辆静止时,则一次试验结束。 在本发明中,被测车辆是指进行ACC性能测试的车辆;前车是指与被测车辆同向、 同车道,并在本车前方行驶的车辆;设定速度是指车辆的期望行驶速度。 步骤二:基于改进自适应卡尔曼滤波的车辆运动状态估计 为了进行复杂场景下的ACC性能测试,应精确、全面的获取每一时刻前车和被测车 辆的运动状态信息。为了满足信息全、精度高的测量需求,需要建立描述车辆运动特性的动 态模型,采用常加速模型,建立被测车辆的运动学模型。 取系统状态向量为X=[pe,p Tn,ve,vn,ae,an] ,其中,pe,pn,ve,vn,ae,an分别表示被 测车辆的东向位置、北向位置、东向速度、北向速度、东向加速度和北向加速度。本发明中矩 阵上角标T表示对矩阵转置,T为离散的周期。针对常加速模型,系统状态方程为: X=Φ·X W (1) 式(1)中,X为系统状态序列,W是零均值的系统过程白噪声向量,对应的噪声协方 差矩阵为Q,Φ为状态转移矩阵。 为推算测试过程中的系统各状态向量,可采用滤波递推的方法,利用较少的系统 观测量实现更多维度的参数递推。采用Sage-Husa自适应卡尔曼滤波算法,以实现车辆运动 状态全面、准确的估计。 首先,选择厘米级高精度卫星定位系统(如GPS、北斗等)作为车辆运动状态估计的 测量传感器,将东向位置、北向位置、对地平面速度、航迹角作为系统观测向量,则系统的观 测方程可表示为: Z=H·X V (2) 式(2)中,系统观测向量为Z=[peg ,png ,vd ,A]T,其中peg ,png分别表示东向位置、北 向位置,由厘米级高精度卫星定位系统(如GPS、北斗等)采集的经纬度坐标转换得到,vd ,A 分别表示厘米级高精度卫星定位系统(如GPS、北斗等)输出的对地速度和航迹角,且满足 H为观测矩阵,V表示与W互不相关的零均值观测白噪声向量,对应的噪声协 7 CN 111595592 A 说 明 书 3/12 页 方差矩阵为R。 其次,对式(1)、式(2)进行离散化处理,离散化后的系统状态方程和观测方程为: 式(3)中,k为离散化时刻,X(k)为k时刻的系统状态,状态转移矩阵 和测 量阵h[k,X(k)]分别为: 且航迹角A(k)与东向速度ve(k)和北向速度vn(k)满足以下关系: 式(3)中的观测方程为非线性方程,利用泰勒级数展开对非线性的观测方程进行 线性化处理,保留到一阶泰勒余项,可得观测矩阵H(k): 式(5)中, 分别表示根据k-1时刻得到的k时刻东向速度和北 向速度的状态估计。 再次,针对式(3)描述的状态方程和观测方程,建立基于Sage-Husa自适应卡尔曼 滤波的递推过程,利用时间更新和观测更新进行滤波递推: 8 CN 111595592 A 说 明 书 4/12 页 P(k)=[I-K(k)H(k)]·P(k,k-1) (11) 式中, 表示根据k-1时刻得到的k时刻的滤波计算值, 为k-1时刻 的最优估计,P(k,k-1)为k时刻的一步预测误差方差矩阵,K(k)为k时刻的滤波增益矩阵, 为k时刻的量测残差,P(k)为k时刻的估计误差方差矩阵, 分别 为观测噪声、系统噪声的均值和方差阵,d(k)为加权参数,且d(k)=(1-ρ)/(1-ρk 1),ρ为遗 忘因子,在本发明中,取ρ=2。 为了避免状态估计发散,提高滤波递推的精度,本发明对滤波算法进行改进: (1)为了准确描述加速度的变化,提高速度估计精度,对过程噪声协方差矩阵进行 修正: 式(16),qCA(k)表示改进后的过程噪声协方差矩阵,κ为系数,在本发明中,取κ= 0.05。 (2)为了避免因实际误差与理论估计值相差过多而影响滤波估计精度,引入加权 系数修正一步预测误差方差矩阵,可表示为: 式中,Cc为加权系数,在本发明中,trace(·)表示计算矩阵的迹。 (3)为了进一步抑制滤波的发散,添加滤波异常判断条件: 综上,式(6)和式(8-19)构成了改进后的Sage-Husa自适应卡尔曼滤波算法。 最后,经过上述改进后的滤波估计,可以准确、实时的递推被测车辆的东向位置、 9 CN 111595592 A 说 明 书 5/12 页 北向位置、东向速度、北向速度等基础性运动参数。输出的被测车辆位置坐标集PSV={P0(pe (0) ,pn(0)) ,P1(pe(1) ,pn(1)) ,...,Pk(pe(k) ,pn(k))},输出的被测车辆速度、加速度信息分 别为vSV={(ve(0) ,vn(0)) ,(ve(1) ,vn(1)) ,...,(ve(k) ,vn(k))},aSV={(ae(0) ,an(0)) ,(ae (1) ,an(1)) ,...,(ae(k) ,an(k))}。 类似地,利用同样的车辆运动模型和滤波递推方法,对前车的基础性运动参数进 行滤波递推,可以输出前车位置坐标集MTV={M0(me(0) ,mn(0)) ,M1(me(1) ,mn(1)) ,...,,Mk (me(k) ,mn(k))},前车速度信息vTV={(be(0) ,bn(0)) ,(be(1) ,bn(1)) ,...,(be(k) ,bn(k))}, 前车加速度信息cTV={(ce(0) ,cn(0)) ,(ce(1) ,cn(1)) ,...,(ce(k) ,cn(k))}。 其中,me(k) ,mn(k)分别表示前车在k时刻的东向位置和北向位置,be(k) ,bn(k) ,ce (k) ,cn(k)分别表示前车在k时刻的东向速度、北向速度、东向加速度和北向加速度。 步骤三:提出并量化ACC性能评价指标 为了实现全面、可靠的ACC性能测评,本发明针对安全、跟车性能、稳定性等因素, 提出了多维度的ACC性能评价指标,并利用步骤二输出的被测车辆和前车的运动状态参数 进行量化,具体地: (1)定速巡航下的速度控制精度: 式(20)中,ξSV为被测车辆在定速巡航下的速度控制精度,vd(k)表示被测车辆在k 时刻的速度,且 表示被测车辆速度的均值,单位均为m/s,s表示测 试过程中的采样点个数。 (2)跟车稳定性: 式(21)中,ηSV为被测车辆的跟车稳定性,ω(k)表示被测车辆在k时刻的横摆角速 度,ωE(k)表示k时刻横摆角速度的期望值,单位均为rad/s,且 其中,RL为道路曲率半径,单位为m。 (3)跟车精度: 式(22)中,θSV为跟车精度,L(k)表示k时刻被测车辆与前车的质心距离,且 表示测试过程中,被测车辆与前车的质心距离 的均值,单位均为m。 (4)速度协调性: 10 CN 111595592 A 说 明 书 6/12 页 式(23)中,μSV为速度协调性,vrc(k)表示k时刻被测车辆与前车的相对速度,且 表示被测车辆与前车的相对速度的均值,单位均为 m/s。 当进行复杂场景下的ACC性能测评时,首先,在步骤一建立的ACC性能测试场景下, 利用步骤二提出的改进滤波算法对车辆位置、速度等运动状态参数进行滤波递推。其次,基 于精确输出的车辆运动状态参数,计算步骤三提出的ACC性能评价指标的量化值,从而实现 了ACC性能优劣的高精度、可靠、全面的科学定量测评。 有益效果:相比于一般的测试,本发明提出的测评方法具有更为精确、可靠、全面 的特点,具体体现在: (1)本发明提出的测评方法基于实际道路试验,相比于硬件在环仿真测试、虚拟软 件仿真测试等方法,能够更好的提高ACC运行的可靠性,更具有说服力。 (2)相比于简单的测试场景,本发明实现了复杂场景下的ACC性能测评,测试场景 与真实的车辆行驶工况更为接近,能够更好的反映实际交通环境下ACC性能的优劣。 (3)车辆运动状态参数和性能评价指标的测量精度高,速度测量精度为0.0135m/s (RMS),实现了高精度的ACC性能测试。 (4)相比于单一的评价指标,本发明提出并量化了多维度的ACC性能评价指标,实 现了ACC性能更准确、可靠、更为全面的科学定量测评。 附图说明 图1是本发明的技术路线示意图; 图2是本发明建立的基于前车车速时变的ACC测试场景示意图; 图3中是某次ACC性能测试中被测车辆和前车的运动轨迹; 图4是图3的局部放大图; 图5是某次ACC性能测试中被测车辆的速度变化曲线图; 图6是图5的局部放大图。











