
技术摘要:
一种智能扫地机器人,包括壳体、行走组件、主刷(1)、尘盒(3)、消毒组件、拖地组件和烘干组件,消毒组件包括紫外线消毒灯(4)和防尘罩(12),防尘罩(12)罩在主刷(1)的上部,防尘罩(12)与尘盒(3)间安装有紫外线消毒灯(4),防尘罩(12)和尘盒(3)使用透明材质;所述水箱(5)贴 全部
背景技术:
扫地机器人,又称自动打扫机、智能吸尘、机器人吸尘器等,是智能家用电器的一 种,能凭借一定的人工智能,自动在房间内完成地板清理工作。一般采用刷扫方式,将地面 杂物吸纳进入自身的垃圾收纳盒,从而完成地面清理的功能。一般来说,将完成清扫、吸尘、 擦地工作的机器人,也统一归为扫地机器人。随着国内生活水平的提高,智能扫地机器人逐 渐普及。 扫地机器人在清洁过程中会将垃圾、尘土等扫入尘盒,但是这些垃圾存放于尘盒 中难免会滋生病菌,刷扫过程中刷子也会直接接触到可能含有病菌的垃圾废物,如果不能 及时对扫地机器人进行清理,很可能将扫地机器人变成污染源,因此需要一些针对扫地机 器人的必要消毒手段。另外,对于具有拖地功能的扫地机器人,清洁效果并不理想,一是因 为空气中仍存在大量漂浮的细小颗粒,这些颗粒不仅影响了空气质量,更会在短时间内又 将刚清洁过的地面弄脏,二是因为拖地后地面的水迹容易打滑。对于扫地机器人的消毒,实 用新型专利CN201820774217.1提出了一种用于扫地机器人的清洁保养装置,使用了专用桶 体进行消毒、清洁与保养工作,但是专门的桶体需要单独购置,使用起来又较为不便。当前 急需一种扫地机器人,能够对机器自身进行必要的消毒,在清洁时减少空气中的悬浮颗粒 物,兼具拖地烘干功能,提升扫地机器人的清洁效果。
技术实现要素:
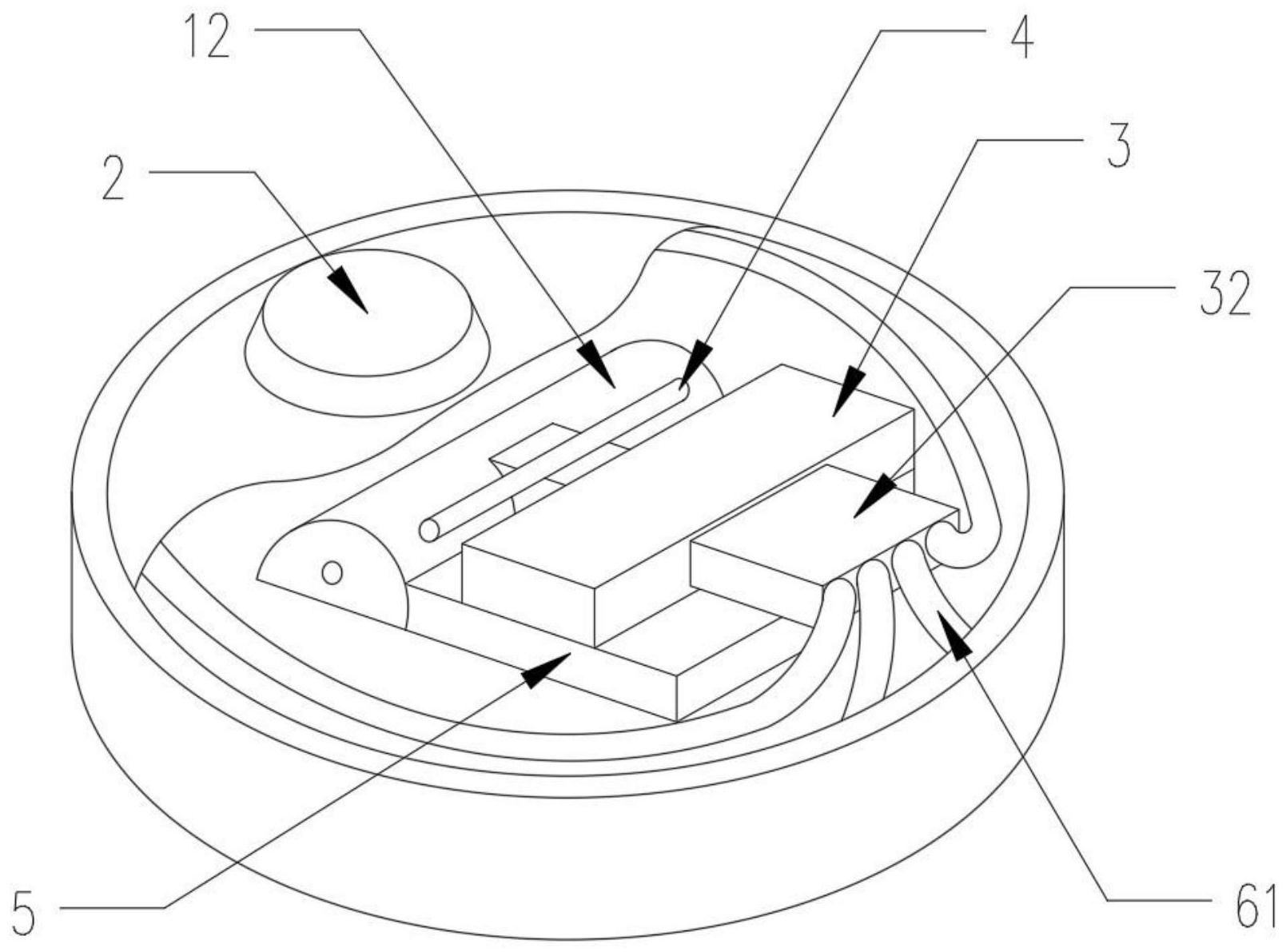
针对上述问题,本发明提供一种智能扫地机器人,能够利用紫外线对主刷、尘盒和 水箱同时消毒,同时利用负离子将空气中的悬浮粒子凝聚成较大的粒子,从而逐渐在室内 沉降下来,通过拖布拖干净,并以加热器辅助烘干,具有较好的自消毒能力和更有效的清洁 能力。 本发明的技术方案如下: 一种智能扫地机器人,包括壳体、行走组件和主刷,所述壳体的底部安装有行走组 件,所述壳体的中部安装有主刷,所述壳体的底部设置开孔,所述主刷从开孔伸出并与地面 接触,所述主刷的后边连接有一尘盒,此外还包括消毒组件、拖地组件和烘干组件,所述消 毒组件包括紫外线消毒灯和防尘罩,所述防尘罩罩在主刷的上部,所述防尘罩与尘盒连通, 所述防尘罩与尘盒间安装有紫外线消毒灯,所述防尘罩和尘盒使用透明材质,所述拖地组 件包括水箱和拖布,所述水箱贴近尘盒,所述拖布安装在水箱底面,所述水箱使用透明材 质,所述烘干组件安装在壳体尾部,所述烘干组件包括加热器和负离子发生器。 通过提供上述方案,通过加入紫外线消毒灯,并将防尘罩、尘盒和水箱透明化,使 紫外线消毒灯能够照射到主刷、尘盒和水箱,同时对主刷、尘盒和水箱进行消毒;利用负离 3 CN 111588310 A 说 明 书 2/6 页 子发生器产生的负离子将空气中的悬浮粒子凝聚成较大的粒子,从而逐渐在室内沉降下 来,再通过拖布拖干净,并以加热器辅助烘干,具有较好的自消毒能力和更有效的清洁能 力。 优选的,所述防尘罩与尘盒间通过集尘通道连通,所述紫外线消毒灯安装在集尘 通道上,所述集尘通道使用透明材质。使用集尘通道不仅方便了防尘罩与尘盒的密闭连接, 也为紫外线消毒灯提供了极佳的安装位置。 作为具体的实施方式,所述尘盒与水箱叠放,所述尘盒的下表面与水箱的上表面 贴合,所述水箱的前侧面与防尘罩贴合,所述集尘通道的下方为水箱的前部。采用上下叠放 的方式,紫外线消毒灯能够同时对主刷、尘盒和水箱进行消毒。 如上所述的一种智能扫地机器人,所述尘盒后端还包括一出风口,所述出风口安 装有过滤网,所述出风口连接有风道,所述风道连通至烘干组件,对主刷产生的风能再次利 用,辅助烘干。 如上所述的一种智能扫地机器人,所述烘干组件还包括若干分流通道,所述加热 器安装在风道内,所述风道的末端连接分流通道,位于壳体尾部的分流通道末端垂直指向 地面。 进一步的,所述负离子发生器安装在加热器后的风道内。分流通道将带有负离子 的热空气吹出,既能烘干地面,又能清理空气中悬浮颗粒。 优选的,所述壳体的前部边缘安装有至少两个水平方向的分流通道。 如上所述的一种智能扫地机器人,所述壳体的顶部安装有激光雷达传感器。激光 雷达传感器能够辨识障碍物。 进一步的,所述防尘罩的边缘与开孔的边缘连接形成一向内凹的半圆柱空间,所 述主刷安装在所述半圆柱空间中。防尘罩将灰尘等垃圾阻隔并收集到尘盒中,避免了灰尘 污染壳体的其他组件。 在一种改进的方案中,所述水箱还安装有水量控制器,所述水箱的水通过水量控 制器流到拖布上。水量控制器用以控制拖布的湿度。 本发明相对于现有技术所取得的有益效果在于: 本发明通过加入紫外线消毒灯,并将防尘罩、尘盒和水箱透明化,使紫外线消毒灯 能够照射到主刷、尘盒和水箱,同时对主刷、尘盒和水箱进行消毒;利用负离子发生器产生 的负离子将空气中的悬浮粒子凝聚成较大的粒子,从而逐渐在室内沉降下来,再通过拖布 拖干净,并以加热器辅助烘干,具有较好的自消毒能力和更有效的清洁能力;集尘通道为紫 外线消毒灯提供了极佳的安装位置;能量再利用,对主刷产生的风能再次利用,辅助烘干; 使用先进的的激光雷达技术,定位准确,合理规划清洁路线;拖布水量可控,拖地效果更佳。 附图说明 通过阅读下文优选实施方式的详细描述,本申请的方案和优点对于本领域普通技 术人员将变得清楚明了。附图仅用于示出优选实施方式的目的,而并不认为是对本发明的 限制。 在附图中: 图1为实施例1中智能扫地机器人的内部结构示意图; 4 CN 111588310 A 说 明 书 3/6 页 图2为实施例1中消毒组件的侧视图; 图3为实施例1中尘盒周围组件的结构示意图; 图4为实施例1中风道内部的结构示意图; 图5为实施例1中无壳体遮挡的内部结构示意图; 图6为实施例1中智能扫地机器人前视图; 图7为实施例1中智能扫地机器人底部结构示意图; 图8为实施例1中水量控制器的结构示意图。 图中各附图标记所代表的组件为: 1、主刷,11、开孔,12、防尘罩,13、集尘通道,2、激光雷达传感器,3、尘盒,31、出风 口,32、风道,4、紫外线消毒灯,5、水箱,51、拖布,52、水量控制器,6、加热器,61、分流通道, 62、负离子发生器。











