
技术摘要:
本发明公开了一种可自适应变形的流体航行器增推止退结构,属于船舶与海洋工程领域。本发明包括若干个增推止退器;所述增推止退器包括铰链和非对称翻板结构;所述铰链通过铰链座固定在所述流体航行器底部,所述非对称翻板结构有孔,被所述铰链穿过;所述铰链在所述铰链 全部
背景技术:
近些年来,流体航行器大量应用于工程实践,其广泛存在于海洋、江河、生物液体 和空气中。一些无人流体航行器在资源勘探、环境监测和军事侦查等领域发挥着至关重要 的作用。 航行速度是评估流体航行器整体性能的关键参数,更快的航行速度意味着更高的 工作效率以及更少的能源消耗。然而,由于波浪、海流、气流等环境因素的干扰以及自身驱 动能力的限制,有些航行器在振荡的流体环境中难以始终沿着既定的航向运动,例如波浪 滑翔机等一些小型的海面无人船。在这种情况下,这一类流体航行器会在航行的方向上反 复振荡,从而降低航行速度,进而降低航行器的工作效率以及经济性。 目前针对提高流体航行器航行效率的研究主要致力于改进其外壳的整体结构形 状,例如设计流线型外壳、安装球鼻首和采用方尾结构等。这些设计确实可以有效减小航行 器沿前进方向所受的航行阻力,提高航行速度。但是对于在振荡流体中运动不稳定的流体 航行器,这些设计则无法起到遏制其后退运动的作用。目前,已有的关于这一方向的研究成 果包括在流体航行器底部安装固定式的非对称结构,以期达到增推止退的效果。然而,这种 结构具有如下两个弊端:第一,它会显著增加流体航行器表面的粗糙度,从而增加航行阻 力;第二,由于考虑到粗糙度的影响,该结构无法设计得很大,因此无法用于较大的流体航 行器。 因此,本领域的技术人员致力于为在振荡流体环境中航行的流体航行器设计一种 更加灵活、高效的增推止退装置。
技术实现要素:
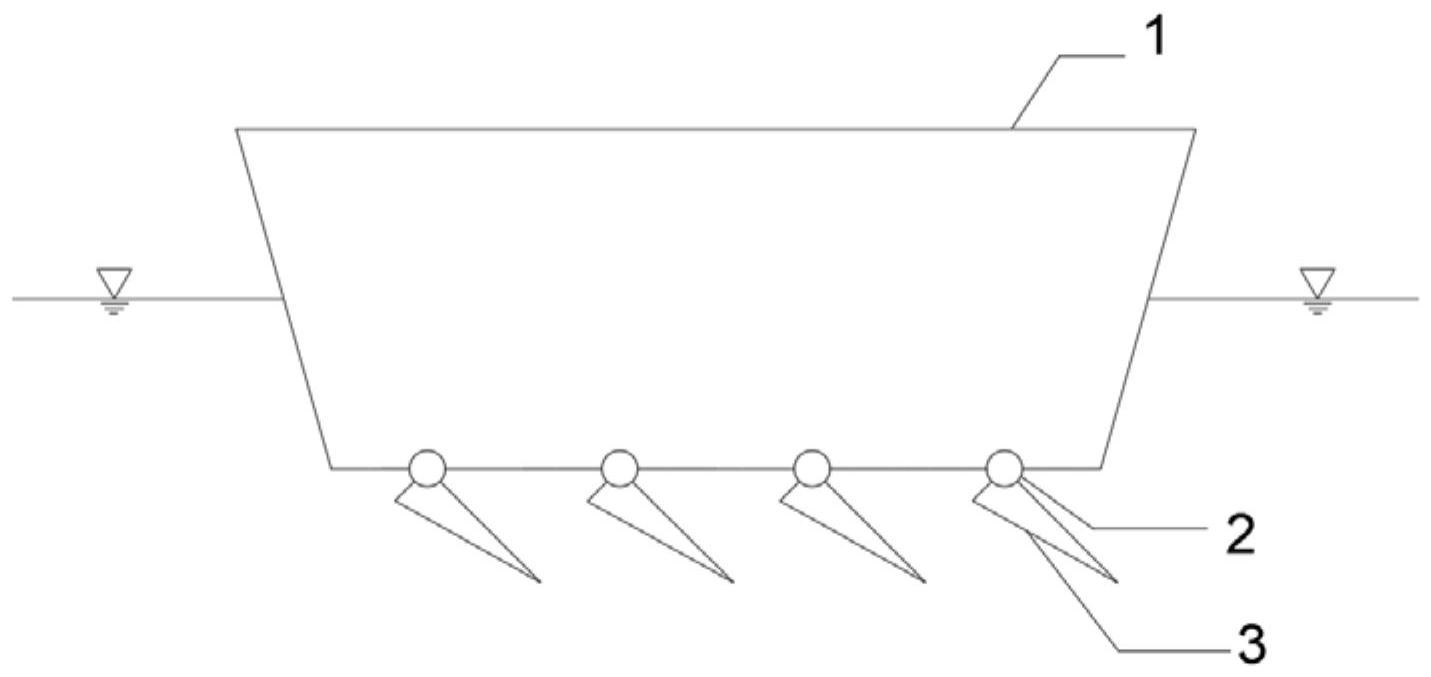
有鉴于现有技术的上述缺陷,本发明所要解决的技术问题是流体航行器在振荡流 体中受干扰,影响航行效率的问题。 为实现上述目的,本发明提供了一种可自适应变形的流体航行器增推止退结构, 包括若干个增推止退器;所述增推止退器包括铰链和非对称翻板结构;所述铰链通过铰链 座固定在所述流体航行器底部,所述非对称翻板结构有孔,被所述铰链穿过;所述铰链在所 述铰链座内转动。 进一步地,所述非对称翻板结构是直角三角形。 进一步地,在所述非对称翻板结构的直角位置开孔与所述铰链固定连接。 进一步地,所述非对称翻板结构可实现0-90度的翻转。 进一步地,在所述流体航行器底部设有所述非对称翻板结构的翻转角度限位。 进一步地,所述直角三角形的长直角边边长是短直角边的两倍以上。 3 CN 111605662 A 说 明 书 2/3 页 进一步地,所述直角三角形的所述短直角边的长度由流动摩擦阻力和所述流体航 行器的粗糙度决定。 进一步地,所述非对称翻板结构可用钢板一次切割而成。 进一步地,所述铰链座与所述流体航行器外壳焊接连接。 进一步地,所述铰链座也可以通过螺栓与所述流体航行器连接。 本发明的技术效果是: 本发明为在振荡流体中运动的流体航行器设计了增推止退结构,本发明能够增加 航行器在后退时受到的流体阻力,有效遏制其后退运动的趋势,使流体航行器获得平均意 义上的向前推力,进而达到增推止退的效果,提高流体航行器的航行效率。此外,由于本发 明具有可自适应变形的特性,因此可有效降低该结构对流体航行器表面粗糙度的影响,不 会显著增加航行阻力。 以下将结合附图对本发明的构思、具体结构及产生的技术效果作进一步说明,以 充分地了解本发明的目的、特征和效果。 附图说明 图1是本发明的一个较佳实施例的一种可自适应变形的流体航行器增推止退结构 应用示意图; 图2是本发明的航行方向与振荡方向一致的流体航行器增推止退结构应用示意 图; 图3是本发明的航行方向与振荡方向相反的流体航行器增推止退结构应用示意 图。











