
技术摘要:
本发明公开了一种基于全方位轮的模块化智能物流系统规划设计方法,包括非布置区膨化处理,扫描间隔确定,X向及Y向扫描、模块数统计及模块编码等步骤组成。本发明针对物流系统实现物料输送、分拣和合流的功能需求,根据工业现场的环境特征,快速确定物流系统所需的模块 全部
背景技术:
当今产品市场竞争激烈,物流作为企业“第三个利润源泉”已成为市场竞争的新焦 点。生产物流作为企业物流的重要组成部分,直接影响产品的生产成本和交货期,已成为企 业提高竞争力的关键因素,愈加受到关注。然而,现有物料输送及分拣系统多基于带式或链 式输送技术。其发展面临以下问题:(1)柔性不足,每条物料输送线的输送方向单一,无法根 据物料类型设置不同输送方向;(2)必须与机械手等配合才能实现分拣、合流和编队等功 能;(3)鲁棒性差,单个输送节点故障会导致整个物流输送系统瘫痪;这些问题与现代物流 高效、柔性的发展趋势间的矛盾日趋尖锐,因此,发明人发明一种基于全方位轮的模块化智 能物流系统(简称物流系统)。该物流系统不仅能够实现物料的输送、分拣、合流、编队等功 能,而且较好的自重构性,当单个模块出现故障时,物流系统能够通过配送路径的重新规划 保证物料配送的通畅,提高输送路线的柔性和鲁棒性,从而实现物流系统的智能化。 然而,该物流系统由多个基于全方位轮的智能物流模块组成,如何根据工业现场 环境特点,确定系统所需模块数,并将模块排列、编码最终形成物流系统,满足物料输送、分 拣和合流等功能需求,是应用该类物流系统过程中必须首先解决的难题。
技术实现要素:
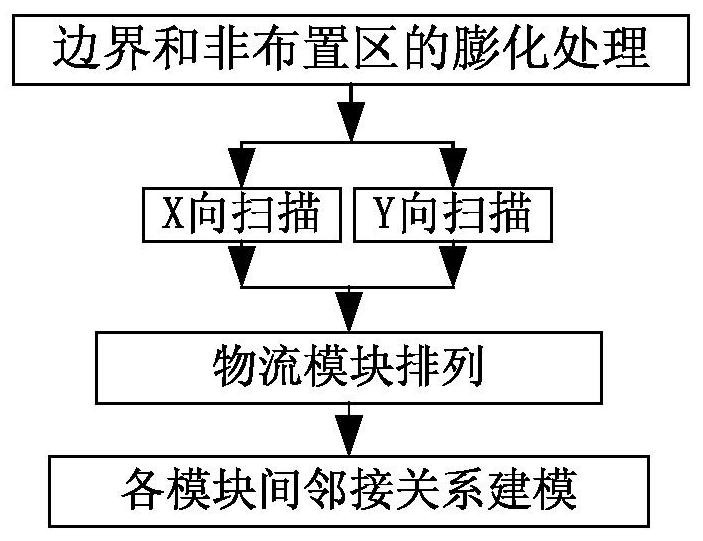
本发明的目的在于针对物流系统实现物料输送、分拣和合流的功能需求,根据工 业现场的环境特征,快速确定物流系统所需的模块数,并对模块进行排列和编码,确定各模 块间的邻接关系,实现对物流系统的规划设计,为物流系统控制及物料配送路径规划提供 基础数据。 为了实现上述技术目的,本发明采用的技术方案是: 基于全方位轮的模块化智能物流系统规划设计方法,所述全方位轮的模块化智能 物流系统由多个智能物流模块组合形成的输送平面,通过多个智能物流模块的接力实现对 物料的输送、分拣以及合流,其中,每个智能物流模块均包括: 固定框架,所述固定框架上开有多个孔,每个孔中设有一个全方位减速驱动轮,并 且所述全方位减速驱动轮的部分轮体伸出所述固定框架的上表面设置,通过多个全方位减 速驱动轮上轮体的摩擦力共同作用于物料,通过对多个驱动轮旋转速度及方向的协同控制 对物料实现以下目的: 第一、驱动物料自转以调整姿态; 第二、独立将物料按需要向多个方向定向输送; 第三、通过物料配送路径的规划,实现多个模块的接力传送; 物联网数据采集装置,设置在所述智能物流模块上,用于判断智能物流模块上方 5 CN 111573125 A 说 明 书 2/15 页 是否有物料及物料种类; 当模块上方无物料时,各模块进入低功耗模式; 当模块上方有物料时,根据物料种类向各自所需方向传送物料; 其特征在于,包括以下几个步骤: S1、边界及非布置区的膨化处理: 非布置区为障碍、设备、人工通道等无法布置智能物流模块的区域,为了避免智能 物流模块越过非布置区或环境边界,首先对非布置区和边界进行膨化处理,膨化尺寸P为智 能物流模块边长L的一半,膨化步骤如下:提取环境及非布置区边界线,以直线型边界线为 例,假定边界线方程为Ax By=C,膨化后的边界线方程为 S2、X向及Y向扫描: 间距为智能物流模块边长L,对膨化后的环境进行扫描,生成网格,并提出一种试 探法,对网格线扫描起点进行适当的偏移优化; S3、完成智能物流模块排列; S4、各模块间的邻接关系建模: 按照一定的顺序对其编码,根据编码确定各智能物流模块间的邻接关系,智能物 流模块间的邻接关系通过一阶邻接矩阵 和方位矩阵D=[dij]K×K来描述,从而为 物流系统的物料配送路径规划提供基础数据,其中,i和j均表示智能物流模块的编号; K为系统中智能物流模块的数量; 表示从模块i到模块j的最短距离; dij表示从模块i与模块j的方位角。 的取值为: 式中L为模块的边长。 dij的取值为: 6 CN 111573125 A 说 明 书 3/15 页 所述固定框架包括: 底板; 面板,通过支撑杆与所述底板支撑连接,面板上开有多个孔,多个全方位减速驱动 轮的一部分均通过所述孔穿过所述面板,从而与物料接触。 所述物联数据采集装置是RFID读卡器、接近开关、二维码/条形码读卡器以及摄像 头中的一种或多种。 单个智能物流模块上的所述全方位减速驱动轮的数量为4个,4个所述全方位减速 驱动轮绕所述面板的中心对称设置。 所述全方位减速驱动轮包括: 电机,安装板,全方位减速驱动轮; 电机与全方位减速驱动轮输入端连接,电机带动全方位减速驱动轮旋转; 安装板采用但不限于L型安装板,L型安装板一端与所述底板固定连接,另一端与 全方位减速驱动轮第一壳体固定连接。 有益效果: (1)本发明通过对边界和非布置区的膨化处理,能够有效避免智能物流模块越过 边界或非布置区。 (2)本发明在进行X向及Y向扫描生成网格时,本发明提出一种试探法对网格线扫 描起点进行适当的偏移优化,从而提高了系统智能物流模块的覆盖率,有利于扩展系统物 料配送的范围和路径柔性。 (3)本发明提出了一种模块邻接关系的表达方式,可为物流系统的控制及物料配 送路径的规划提供基础数据。 附图说明 图1为基于全方位轮的模块化智能物流系统示意图; 其中,1、所需输送的物料示意图;2、基于全方位轮的智能物流模块; 图2为本发明全方位轮在面板上的三种布置方式; 其中,a为中心布置;b为偏心布置;c为对角布置; 图3为基于全方位轮的智能物流模块典型结构示意图; 7 CN 111573125 A 说 明 书 4/15 页 其中,2-1、制造物联网数据采集装置;2-2、全方位减速驱动轮;2-3、面板;2-4、底 板;2-5、支撑杆; 图4为全方位减速驱动轮结构示意图; 其中,2-2-1、驱动电机;2-2-2、全方位轮;2-2-3、安装板;2-2-4、传动装置; 图5为本发明智能物流模块控制流程; 图6为本发明一个实施例8个传送方向及物料自转结构示意图; 图7为本发明各个物料传送方向对应的四个全方位减速驱动轮的启停及旋转方向 示意图; 图8为本发明四个驱动轮旋转方向、速度与物料传送速度、方向示意图; 图9为本发明四个驱动轮旋转方向、速度与物料自转速度、方向示意图; 图10为本发明智能物流系统控制流程图; 图11为本发明模块邻接关系建模及物料输送路径示意图; 图12为本发明工业现场环境示意图; 图13为本发明规划设计步骤图; 图14为非布置区膨化后的环境示意图; 图15为X向及Y向扫描扫描后的环境示意图; 图16为完成智能物流模块排列后的环境示意图; 图17为智能物流模块邻接关系建模示意图; 图18为本发明物料输送路径规划步骤; 图19为两种物料配送路径相向冲突示意图。











