
技术摘要:
本发明公开了一种基于交通灯信号的避撞方法、系统及车辆,属于交通安全技术领域。所述避撞方法包括:响应于自车的避撞指令,获取路口的交通灯信号;当所述交通灯信号为红灯信号或黄灯信号时,确定自车位置;当所述自车位置位于避撞工作区域时,获取自车行驶速度和自车 全部
背景技术:
道路路口作为车辆和人流的一个汇聚点,受到车辆条件及道路况等影响,存在驾 驶安全不足的问题,容易发生碰撞引起交通事故。
技术实现要素:
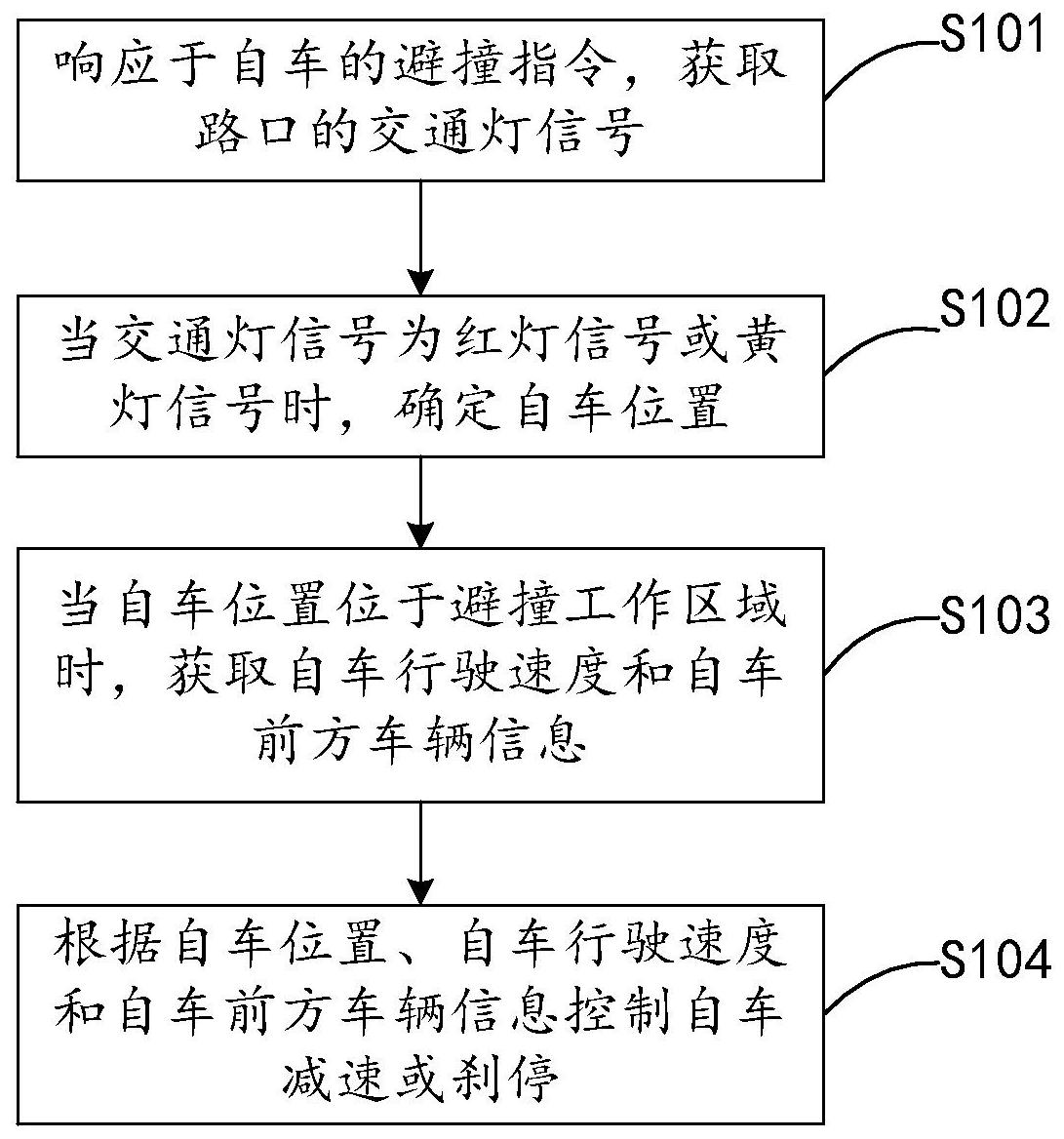
针对现有技术在路口处驾驶安全不足的问题,本发明实施例提供一种基于交通灯 信号的避撞方法、系统及车辆。 为了达到所述目的,本发明实施例采用的技术方案是: 第一方面,本发明实施例提供了一种基于交通灯信号的避撞方法,所述避撞方法 包括: 响应于自车的避撞指令,获取路口的交通灯信号; 当所述交通灯信号为红灯信号或黄灯信号时,确定自车位置; 当所述自车位置位于避撞工作区域时,获取自车行驶速度和自车前方车辆信息; 根据所述自车位置、所述自车行驶速度和所述自车前方车辆信息控制自车减速或 刹停。 第二方面,本发明实施例提供了一种基于交通灯信号的避撞系统,所述避撞系统 包括信号接收模块、第一控制模块及第二控制模块; 所述信号接收模块用于响应于自车的避撞指令,获取路口的交通灯信号,并将所 述交通灯信号发送至所述第一控制模块; 所述第一控制模块用于对所述交通灯信号进行判断,当所述交通灯信号为红灯信 号或黄灯信号时,确定自车位置,并将所述自车位置发送至所述第二控制模块; 所述第一控制模块还用于判断所述自车位置是否位于避撞工作区域,当所述自车 位置位于避撞工作区域时,获取自车行驶速度和自车前方车辆信息,并将所述自车行驶速 度和所述自车前方车辆信息发送至所述第二控制模块; 所述第二控制模块用于根据所述自车位置、所述自车行驶速度和所述自车前方车 辆信息控制自车减速或刹停。 第三方面,本发明实施例提供了一种车辆,所述车辆包括避撞控制开关、存储器和 处理器,所述存储器中存储有至少一条指令,当所述避撞控制开关开启时,所述至少一条指 令由所述处理器加载并执行以实现:响应于自车的避撞指令,获取路口的交通灯信号;当所 述交通灯信号为红灯信号或黄灯信号时,确定自车位置;当所述自车位置位于避撞工作区 域时,获取自车行驶速度和自车前方车辆信息;根据所述自车位置、所述自车行驶速度和所 述自车前方车辆信息控制自车减速或刹停。 4 CN 111591286 A 说 明 书 2/9 页 本发明的技术方案带来的有益效果是: 通过综合考虑路口的交通灯信号、自车位置、自车行驶速度和自车前方车辆等路 况信息来控制车辆减速或刹停,避免自车与自车前方车辆以及人行道行人发生碰撞引发交 通事故,同时也可以防止由于车辆速度过快导致自车误闯红灯。 附图说明 为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使 用的附图做简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于 本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他 的附图。 图1是本发明实施例提供的一种基于交通灯信号的避撞方法的流程示意图。 图2是本发明实施例提供的车道区域划分示意图。 图3是本发明实施例提供的对自车进行避撞控制的流程示意图。 图4是本发明实施例提供的基于交通灯信号确定是否停止对自车进行控制的流程 示意图。 图5(a)是本发明实施例提供的自车前方无目标车辆的一个示例示意图; 图5(b)是本发明实施例提供的自车前方无目标车辆的另一个示例示意图; 图6(a)是本发明实施例提供的目标车辆向前行驶的一个示例示意图; 图6(b)是本发明实施例提供的目标车辆向前行驶的另一个示例示意图; 图7(a)是本发明实施例提供的目标车辆静止/倒退的一个示例示意图; 图7(b)是本发明实施例提供的目标车辆静止/倒退的另一个示例示意图; 图8是本发明实施例提供的一种基于交通灯信号的避撞系统的结构示意图; 图9是本发明实施例提供的一种车辆的结构示意图。











