
技术摘要:
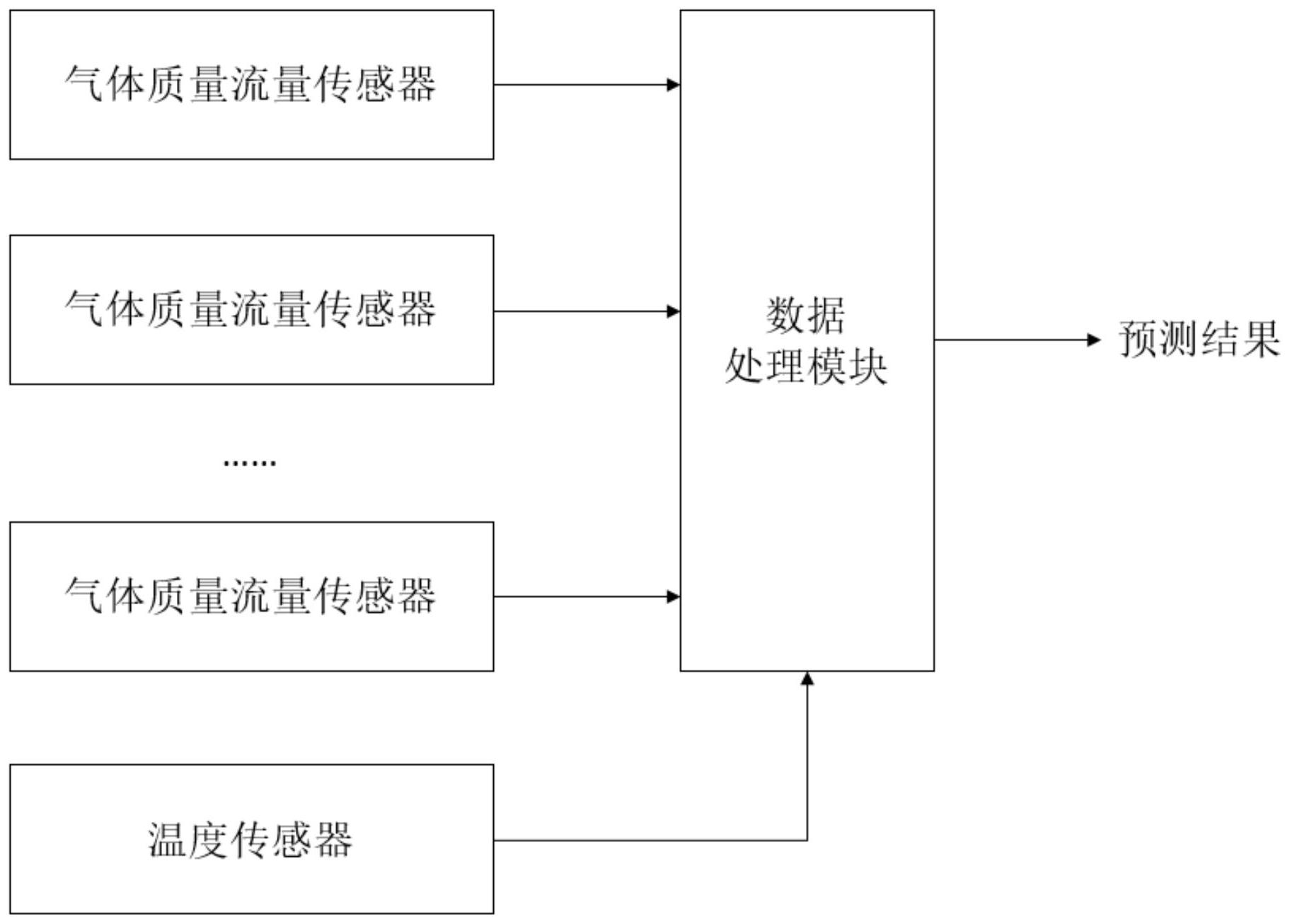
本申请公开了一种管道气体测量系统、方法和存储介质,系统包括:传感器组件,其包括多个气体质量流量传感器和安装组件,多个所述气体质量流量传感器安装在所述安装组件上,所述安装组件被安装在管道内时使得多个所述气体质量流量传感器在所述管道的内径方向上分布;温 全部
背景技术:
随着工业的快速发展,工业各种用气需求量也与日俱增,供气所需的管道直径也 逐步增大。然而,现有插入式气流流量测量方法通常是通过测量管道中间一点的流量来推 导得到整个管道的气体流量。实际上,这种传统的测量方式对于大管径测量精度比较低。
技术实现要素:
为解决上述技术问题的至少之一,本申请的目的在于:提供一种管道气体测量系 统、方法和存储介质。 第一方面,本申请实施例提供了: 一种管道气体测量系统,包括: 传感器组件,其包括多个气体质量流量传感器和安装组件,所述多个气体质量流 量传感器安装在所述安装组件上,所述安装组件被安装在管道内时使得多个所述气体质量 流量传感器在所述管道的内径方向上分布; 温度传感器,用于检测管道内气体的温度数据; 数据处理模块,用于将多个所述气体质量流量传感器的检测数据以及所述温度传 感器的检测数据输入到预测模型中进行预测,得到气体质量流量的检测结果。 进一步,所述安装组件被安装在管道内时,多个所述气体质量流量传感器以所述 管道的截面圆心为中心对称分布。 进一步,所述数据处理模块中存储有多个管径对应的预测模型以及用户配置的管 径; 所述将多个所述气体质量流量传感器的检测数据以及所述温度传感器的检测数 据输入到预测模型中进行预测,具体为: 根据所述用户配置的管径选择预测模型; 将多个所述气体质量流量传感器的检测数据以及所述温度传感器的检测数据输 入到选择的预测模型中进行预测。 第二方面,本申请实施例提供了: 一种管道气体测量方法,包括以下步骤: 获取多个气体质量流量传感器采集的检测数据; 获取管道内气体的温度数据; 将多个所述气体质量流量传感器采集的检测数据和所述温度数据输入到预测模 型中进行预测,得到气体质量流量的检测结果; 其中,多个所述气体质量流量传感器安装在一个安装组件上,所述安装组件被安 装在所述管道内并使得多个所述气体质量流量传感器在所述管道的内径方向上分布。 5 CN 111595401 A 说 明 书 2/7 页 进一步,所述预测模型通过以下步骤得到: 获取训练样本和所述训练样本对应的标签; 根据所述训练样本和所述训练样本对应的标签对预测模型进行训练,直到满足预 设条件。 进一步,所述获取训练样本和所述训练样本对应的标签,包括: 向管道中输送预设或者随机的质量流量的气体; 获取所述管道中温度传感器的检测数据和多个所述气体质量流量传感器的检测 数据,作为训练样本; 根据所述质量流量作为所述训练样本的标签。 进一步,所述预测模型通过以下步骤得到: 计算对称两个气体质量流量传感器的电压平均值,电压平均值表示为Ui=(ui u(2n-(i-1)))/2,i=1,2,…,n; 将温度数据T和电压平均值Ui作为自变量,供气流量Qm作为因变量,建立拟合模型; 在高维空间构建线性回归函数:y(x)=wΦ(x) b;其中,y(x)代表供气流量Qmj,xj 代表输入向量[U1j,U2j,…,Unj,Tj],w代表回归函数的斜率,b代表回归函数的截距; 引入松弛变量ξ>0和ξ*j j >0,得到回归函数的约束条件为:yj-wΦ(xj)-b≤ε ξj,wΦ (x *j) b-yj≤ε ξj (j=1,2,…,m),得到最优回归函数为 其中,C为 惩罚因子,C>0,C用于控制误差超出ε的样本的惩罚程度; 引入拉格朗日函数,将最优回归函数转化为对偶形式: 最优回归函数的约 束条件为 a和a*均为带求解的支持向量,K(xj,xk)为支持向量 机核函数,l为训练样本的数量,K(x ,x )=EXP(-|x-y|2/σ2j k ),其中,σ2为核参数; 将回归函数可转化为 选择训练样本的均值误差e作为粒子群算法的适应度函数,粒子群算法的适应度 函数计算公式为 其中,yj(j=1 ,2 ,… ,l)为第j个样本的标签,y *j (j=1 , 2,…,l)为第j个样本的预测值; 对训练样本进行标准化,线性映射到[0,1]范围内,所述线性映射的计算公式为 xi’=(xi-xmin)/(xmax-xmin); 建立由惩罚因子C和方差σ组成的粒子Xi=(Ci,σi),并对粒子进行初始化; 随机产生粒子的初始位置和速度,以及设置最大迭代次数; 将初始的粒子代入已建立的支持向量机模型中,把标签作为输出值,将训练样本 输入支持向量机模型进行训练,根据所述适应度函数计算预测误差,如果所述预测误差小 于设定值,则得到最优粒子,否则进入下一步骤; 6 CN 111595401 A 说 明 书 3/7 页 将粒子Xi=(Ci,σi)按照下式对其速度和位置进行更新: vij(t 1)=w(t)vij(t) c1r1(pij(t)-xij(t)) c2r2(gj(t)-xij(t)),xij(t 1)=xij (t) vij(t 1); 其中,w为权重;c1和c2为加速因子;r1和r2为分布于[0,1]的随机数;pij为粒子个体 极值;gj为整个种群的极值;xij(t)和vij(t)分别为t时刻的位置和速度; 将更新后的粒子代入支持向量机模型重新计算预测误差,判断新的预测误差是否 小于预设值,同时判断是否达到最大迭代次数;若达到最大迭代次数或者新的预测误差小 于预设值,则得到最优粒子;若未达到最大迭代次数或者新的预测误差大于等于预设值,则 返回所述将粒子Xi=(Ci,σi)按照下式对其速度和位置进行更新的步骤; 将最优粒子代入支持向量机模型中,得到预测模型。 第三方面,本申请实施例提供了: 一种管道气体测量系统,包括程序、存储器和处理器; 所述程序存储在处理器之中; 所述程序被处理器加载时执行所述的管道气体测量方法。 第四方面,本申请实施例提供了: 一种存储介质,其存储有程序,所述程序被处理器执行时实现所述的管道气体测 量方法。 本申请实施例的有益效果是:本申请设置了传感器组件,该传感器组件包括多个 气体质量流量传感器和安装组件,所述多个气体质量流量传感器安装在所述安装组件上, 所述安装组件被安装在管道内时使得多个所述气体质量流量传感器在所述管道的内径方 向上分布,本申请通过采集在所述管道的内径方向上分布的检测数据进行流量预测,相对 于现有技术而言,本申请将气体质量流量在管道内存在不均匀分布的因素考虑在预测过程 中,预测结果相对于现有技术更加准确。 附图说明 图1为根据本申请实施例提供的一种管道气体测量系统模块框图; 图2为根据本申请实施例提供的传感器组件安装结构的正视图; 图3为根据本申请实施例提供的传感器组件安装结构的侧视图; 图4为根据本申请实施例提供的一种管道气体测量方法的流程图。











