
技术摘要:
一种点云特征点提取方法、点云传感系统及可移动平台,其中,所述方法包括:获取可移动平台所处环境的三维点云(S201);将所述三维点云沿高度方向投影到水平平面,得到二维投影点云(S202);对所述二维投影点云进行栅格化处理以及特征信息统计,生成点云信息图(S203);基 全部
背景技术:
定位技术可以为可移动平台提供位置等信息,是可移动平台进行路径规划、运动 控制和自主决策的前提。目前较为成熟的方法是基于点云传感器对可移动平台进行定位, 基于点云传感器定位需要对点云传感器采集到的完整点云进行在线计算,并基于有效范围 内所有点云进行匹配。由于点云传感器采集到的完整点云数据量通常很大,故对完整点云 进行在线计算时运算量大,导致需要消耗大量的计算资源,算法应用成本高。为降低定位过 程中的运算量,可以考虑只对完整点云中的部分点云进行计算,但如何提取完整点云中用 于定位计算的部分点云是有待解决的问题。
技术实现要素:
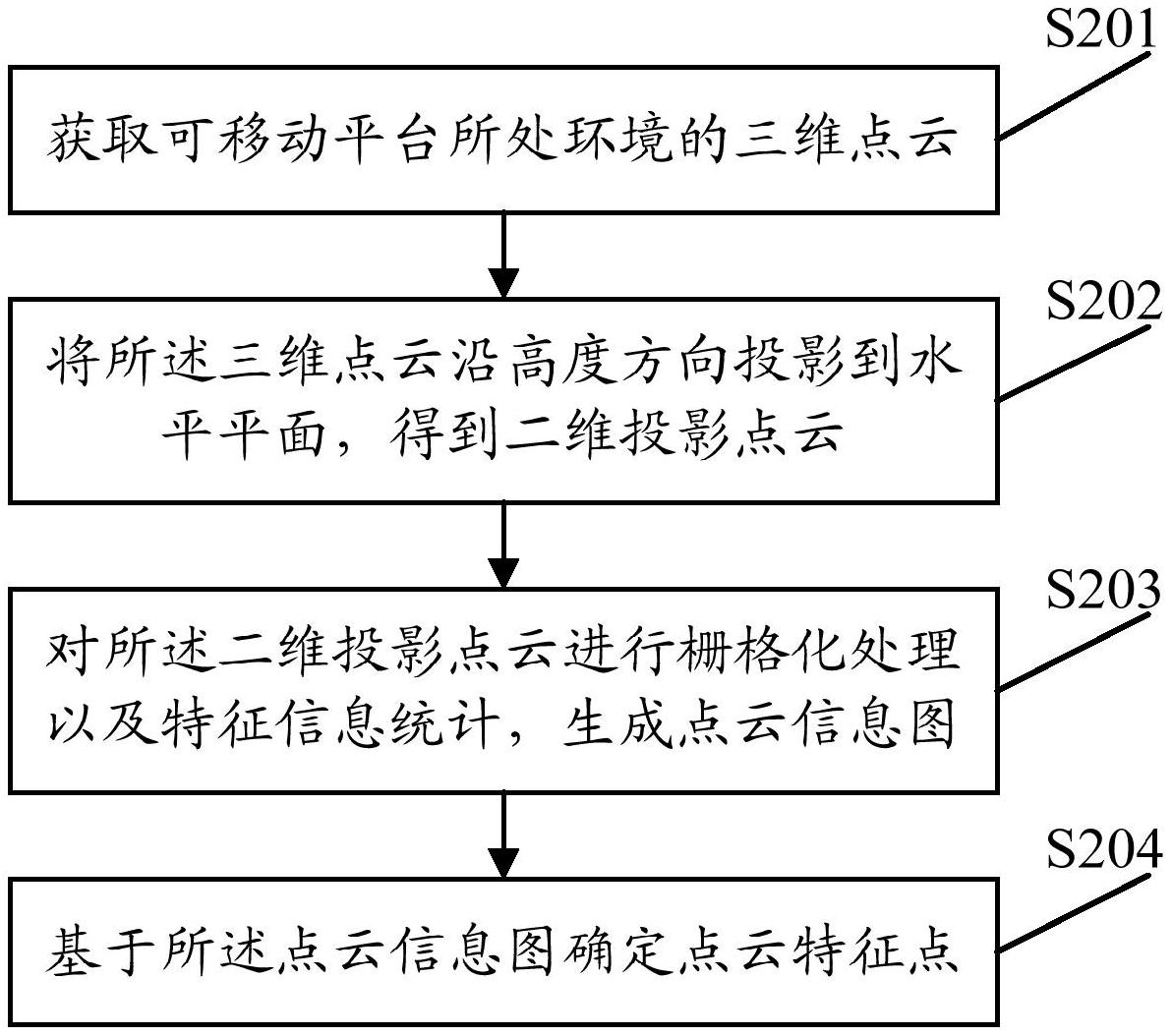
本发明实施例公开了一种点云特征点提取方法、点云传感系统及可移动平台,可 以基于点云信息图有效提取点云中的特征点。 本发明实施例第一方面公开了一种点云特征点提取方法,所述方法包括: 获取可移动平台所处环境的三维点云; 将所述三维点云沿高度方向投影到水平平面,得到二维投影点云; 对所述二维投影点云进行栅格化处理以及特征信息统计,生成点云信息图; 基于所述点云信息图确定点云特征点。 本发明实施例第二方面公开了一种点云传感系统,包括:点云传感器、存储器和处 理器,所述存储器,用于存储程序指令; 所述处理器,用于执行所述存储器存储的程序指令,当所述程序指令被执行时,所 述处理器用于: 通过所述点云传感器获取所述点云传感系统所处环境的三维点云; 将所述三维点云沿高度方向投影到水平平面,得到二维投影点云; 对所述二维投影点云进行栅格化处理以及特征信息统计,生成点云信息图; 基于所述点云信息图确定点云特征点。 本发明实施例第三方面公开了一种可移动平台,包括: 机身; 动力系统,安装在所述机身,用于为所述可移动平台提供动力; 如上述第二方面所述的点云传感系统。 本发明实施例第三四方面公开了一种计算机可读存储介质,所述计算机可读存储 介质中存储有计算机程序,所述计算机程序被处理器执行时实现如上述第一方面所述方法 的步骤。 7 CN 111602171 A 说 明 书 2/9 页 本发明实施例通过获取可移动平台所处环境的三维点云,并将三维点云沿高度方 向投影到水平平面,得到二维投影点云;对二维投影点云进行栅格化处理以及特征信息统 计,生成点云信息图,并基于点云信息图确定点云特征点,从而可以基于点云信息图有效提 取点云中的特征点。 附图说明 为了更清楚地说明本发明实施例中的技术方案,下面将对实施例中所需要使用的 附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领 域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的 附图。 图1是本发明实施例公开的一种可移动平台的结构示意图; 图2是本发明实施例公开的一种点云特征点提取方法的流程示意图; 图3是本发明实施例公开的点云分布情况示意图; 图4是本发明实施例公开的一种点云传感系统的结构示意图。











