
技术摘要:
本发明公开了一种多维故障的检测和识别方法,包括以下步骤:S1:构造故障检验统计量,并基于卡方检验对故障进行检验;S2:当检测到有故障存在时,融合数据探测法和相关系数法的识别结果构造故障集;S3:根据故障集对故障进行识别和剔除;通过融合数据探测法和相关分析 全部
背景技术:
在全球卫星导航系统中,卫星信号极易受周围环境和人为因素的干扰,导致定位 精度和可靠性难以得到保证,然而在安全应用领域导航系统的可靠性至关重要。完好性服 务可在导航系统不能提供满足要求的导航定位服务时及时向用户发出告警。接收机自主完 好性监测是提供完好性服务的常用方法,它主要包括对系统故障的检测和识别。然而常规 的RAIM算法主要针对单个故障假设条件下提出的,当系统存在单个故障时具有较好的效 果;但系统同时存在多个故障时,虽然常规RAIM算法也能进行故障的检测和识别,但识别准 确率和效率均不理想,都有待提高。 因此,提供一种通过融合数据探测法和相关分析法两种典型RAIM算法对故障进行 识别和处理,在多维故障情况相比单独采用数据探测法和相关分析法两种RAIM算法具有更 高的故障识别准确率和识别效率,能够进一步提高卫星导航系统的完好性和可靠性的一种 多位故障的检测和识别方法是本领域技术人员亟需解决的问题。
技术实现要素:
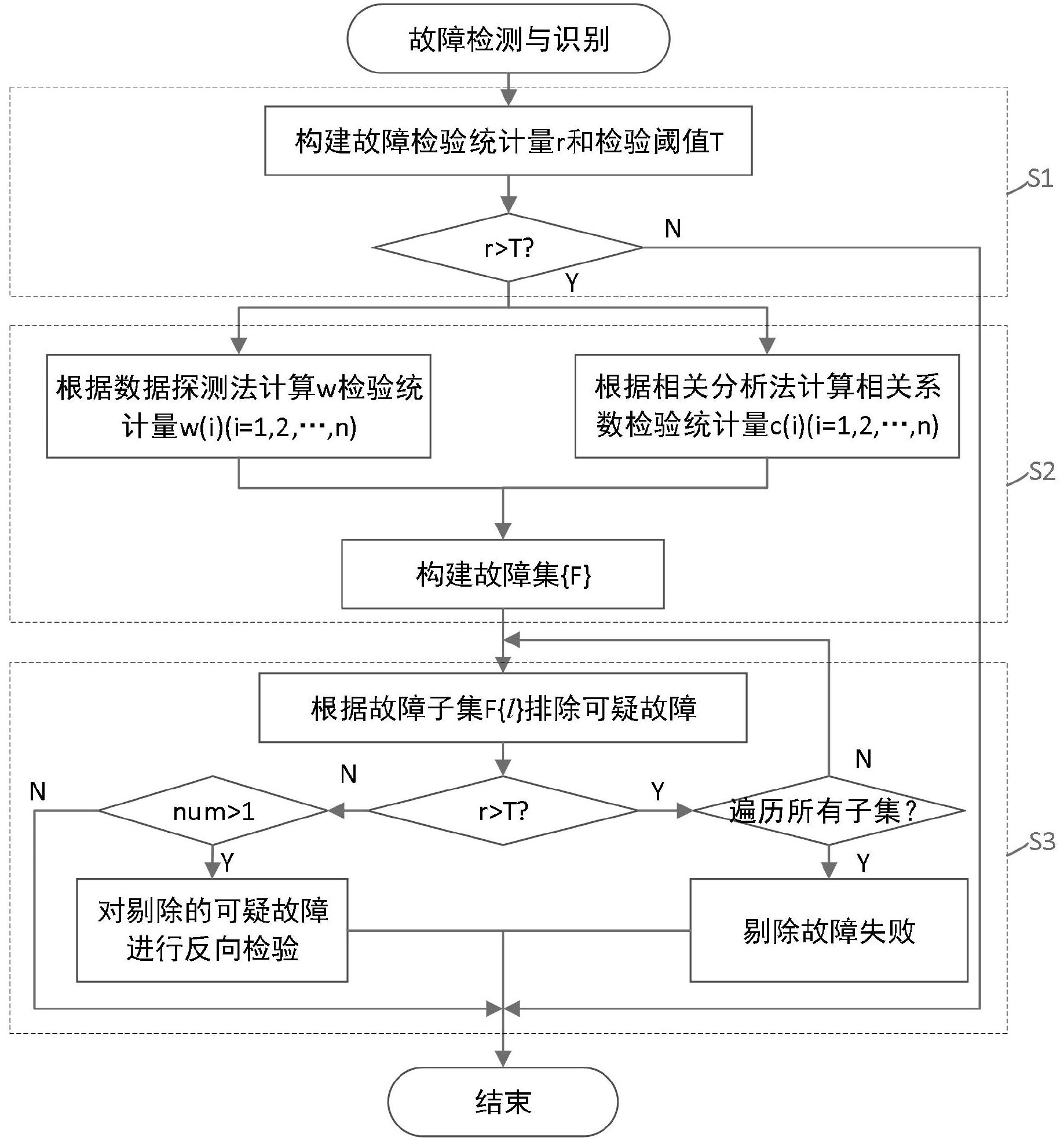
有鉴于此,本发明提供了一种所谓故障的检测和识别方法,通过融合数据探测法 和相关分析法两种典型RAIM算法对故障进行识别和处理,在多维故障情况相比单独采用数 据探测法和相关分析法两种RAIM算法具有更高的故障识别准确率和识别效率,能够进一步 提高卫星导航系统的完好性和可靠性。 为了实现上述目的,本发明采用如下技术方案: 一种多维故障的检测和识别方法,包括以下步骤: S1:构造故障检验统计量,并基于卡方检验对故障进行检验; S2:当检测到有故障存在时,融合数据探测法和相关系数法的识别结果构造故障 集; S3:根据故障集对故障进行识别和剔除。 优选的,S1中基于假设检验法实现对故障的探测,采用最小二乘残差的平方和构 造故障检验统计量; 其中,假设检验构造为: H0:r<T,H1:r>T (1) 式中,H0为原假设,表示无故障存在,H1为备选假设,表示有故障存在,r为检验统计 量,T为检验阈值; 检验统计量采用最小二乘残差平方和构造为: 5 CN 111596317 A 说 明 书 2/7 页 式中,v为最小二乘残差矢量,P为观测量的等价权矩阵,σ0为单位权方差因子,χ2表 示卡方分布,m和n分别为观测量和状态参数的个数; 检验阈值T由误警率和冗余观测量的个数确定,即 式中,PFA为误警率,m-n表示冗余观测量的个数。 优选的,S2中融合数据探测法和相关分析法构造故障集的方法是基于对两种方法 识别结果的一致性评价确定各观测量发生故障的概率,并据此构建故障集合;融合数据探 测法和相关分析法构建故障集的步骤为: S21:采用数据探测法和相关分析法对故障进行识别,并对识别结果进行排序; S22:根据两种方法的识别结果确定各观测量为故障的概率,并按从大到小的顺序 进行排序得到观测向量f; S23:根据观测向量f,构造故障集{F}。 优选的,S21中采用数据探测法和相关分析法对故障进行识别; 相关分析法是基于测量误差与观测残差之间的相关性程度对观测故障进行识别, 观测误差ε与观测残差v之间的关系为: 式中,y为观测向量,A为观测矩阵,P观测量的权矩阵,I为单位矩阵,S=I-Q为映射 矩阵,Si=[S T1i S2i … Smi] (i=1,2,...,m)为S矩阵的第i列,表示测量误差εi在残差向量v 上的投影向量,反映测量误差εi对v的贡献程度,相关分析法通过评估残差向量v与投影向 量Si之间的相关性程度,反映测量误差与观测残差之间的相关性程度,实现故障识别; 采用相关系数来表征观测误差与观测残差之间的相关性程度,即 式中,c(i)表示第i个观测量的相关系数, 和 分别为向量Si和v的均值;根据相 关系数的大小按降序对观测量进行排序,获取向量c=[c(1) ,c(2) ,...,c(m)]; 数据探测法是基于观测误差服从正态分布的假设实现对观测故障的识别,其统计 量定义为 式中,vi和 分别表示残差向量v的第i个元素及其对应的标准差,Sii为矩阵S的 第i行第i列元素,w(i)表示第i个观测量的检验统计量;根据w(i)值的大小按降序对观测量 进行排序,从而获取向量w=[w(1) ,w(2) ,...,w(m)]。 优选的,S22中观测向量的构建方法为,根据各观测量为可疑故障的概率按从大到 6 CN 111596317 A 说 明 书 3/7 页 小的顺序进行排列获取观测向量f;各观测量为可疑故障的概率计算公式为 Pi=1-(wi ci)/2m(i=1,2,...,m) (7) 式中,wi和ci分别表示第i个观测量的检验统计量在向量w和c中的索引编号; 根据各观测向量为可疑故障的概率大小,按从大到小的顺序进行排序得到观测向 量 f=[f(1) ,f(2) ,...,f(m)] (8) 优选的,S23中根据观测向量f构建故障集的方法为,从观测向量f中逐次按序选择 1个、2个、...、k-1个观测量构造故障子集F{1}、F{2},...,F{k-1};从观测量任意选择k个观 测量构造 个故障子集F{k},F{k 1},...,F{S};故障集{F}的构造如下: 式中,k=m-n-1为最多故障的个数。 优选的,S3中根据故障集合对故障进行识别和剔除的步骤为: S31:从故障集合{F}中逐次选择故障子集F{l}(l=1,2,...,S),并根据故障子集 中包含的元素排除可疑观测; S32:更新故障检验统计量r和检验阈值T,并判断检验统计量与检验阈值之间的大 小; S33:如果r>T,进一步判断是否遍历了所有故障子集,如果没有则执行S31;否则, 故障识别失败; S34:如果r≤T且排除的可疑观测的个数num>1,则进一步对剔除的可疑观测进行 反向检验。 经由上述的技术方案可知,与现有技术相比,本发明公开提供了一种多维故障的 检测和识别方法,通过融合数据探测法和相关分析法两种典型RAIM算法对故障进行识别和 处理,在多维故障情况相比单独采用数据探测法和相关分析法两种RAIM算法具有更高的故 障识别准确率和识别效率,能够进一步提高卫星导航系统的完好性和可靠性。 附图说明 为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现 有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本 发明的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据 提供的附图获得其他的附图。 图1附图为本发明提供的一种多维故障检测和识别方法流程图。 7 CN 111596317 A 说 明 书 4/7 页 图2附图为本发明提供的一种融合数据探测法和相关分析法进行故障集构建的流 程图。 图3附图为本发明提供的一种基于故障集新型故障识别和处理的流程图。 图4附图为本发明提供的采用单系统GPS观测数据的测试结果。 图5附图为本发明提供的采用单系统BDS观测数据的测试结果。 图6附图为本发明提供的采用GPS/BDS组合系统观测数据的测试结果。











