
技术摘要:
本发明公开了一种仿生行走机械动物,具体涉及行走机器人领域,包括躯干机构,所述躯干机构顶部传动连接有头体,所述头体两侧均固定连接有收声机构,所述头体一侧连接有红外摄像头和高清摄像头,所述躯干机构两侧均连接有第一驱动机构,所述第一驱动机构连接有手臂机构 全部
背景技术:
机器人是一种能够半自主或全自主工作的智能机器,具有感知、决策、执 行等基 本特征,可以辅助甚至替代人类完成危险、繁重、复杂的工作,提高工 作效率与质量,服务 人类生活,扩大或延伸人的活动及能力范围。 传统的机器人多为模拟人类结构,但由于在运动汇总缺乏配重结构,在 崎岖路段 行走容易出现晃动,影响到机械生物的运动行走过程,并且机械臂 搬运物料时缺乏摩擦力 和受力机构,不能很好的满足使用需要。
技术实现要素:
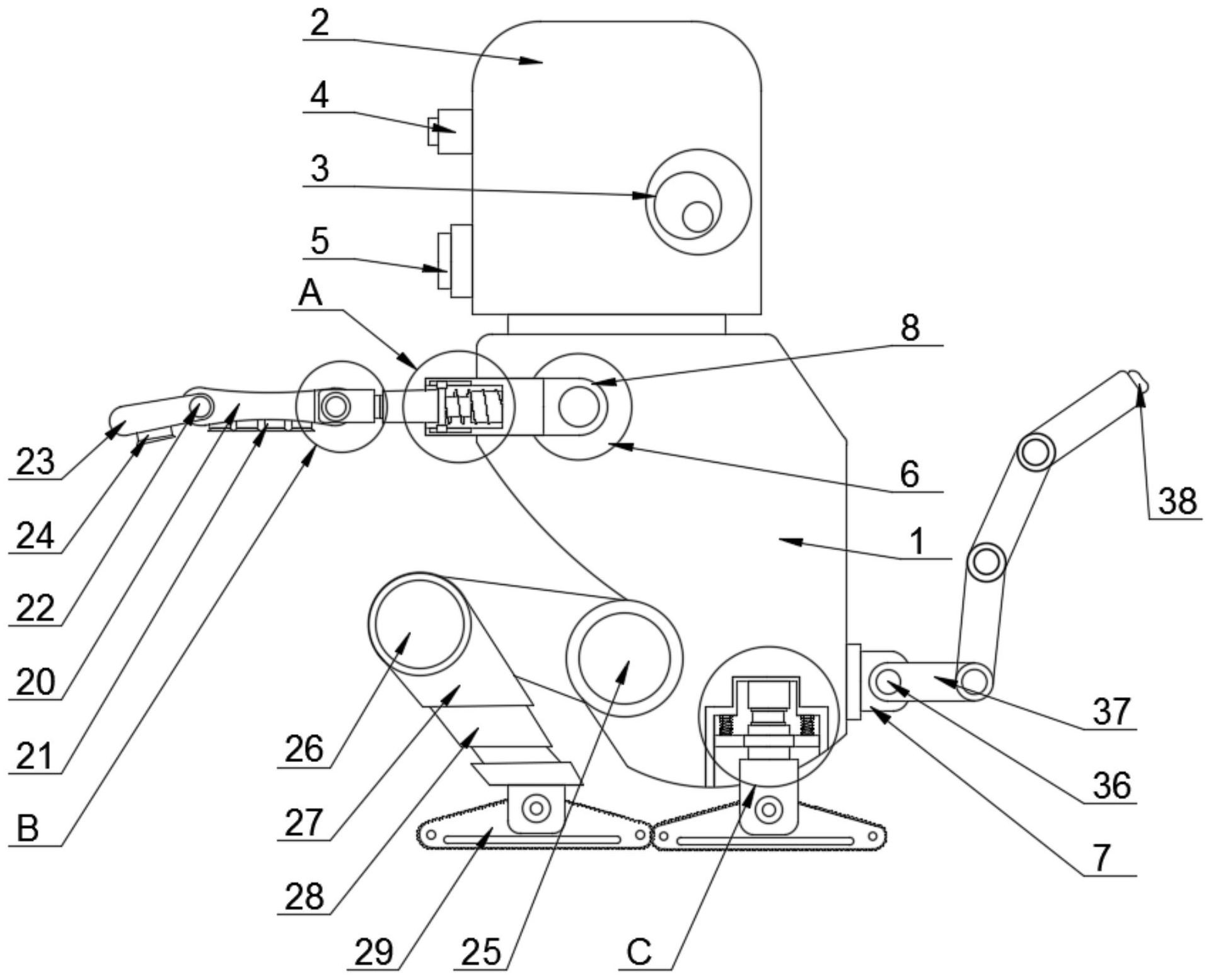
为了克服现有技术的上述缺陷,本发明的实施例提供一种仿生行走机械 动物,本 发明所要解决的技术问题是:在运动汇总缺乏配重结构,在崎岖路 段行走容易出现晃动, 影响到机械生物的运动行走过程,并且机械臂搬运物 料时缺乏摩擦力和受力机构的问题。 为实现上述目的,本发明提供如下技术方案:一种仿生行走机械动物, 包括躯干 机构,所述躯干机构顶部传动连接有头体,所述头体两侧均固定连 接有收声机构,所述头 体一侧连接有红外摄像头和高清摄像头,所述躯干机 构两侧均连接有第一驱动机构,所述 第一驱动机构连接有手臂机构,所述手 臂机构一侧固定连接有固定座,所述固定座内腔两 侧均开设有滑槽,且滑槽 内滑动连接有滑块,且两侧滑块之间固定连接有滑板,所述滑板 一侧固定连 接有伸缩杆,所述伸缩杆另一端与固定座内腔一侧固定连接,所述伸缩杆外 侧壁套设有第一弹簧,所述第一弹簧两端分别与滑板和固定座内腔对应位置 固定连接,所 述滑板另一侧固定连接有连接杆,所述连接杆另一端固定连接 有转轴,所述转轴外侧壁套 设有轴承,所述轴承一侧嵌设有连接块,所述连 接块一侧设有第一铰接机构,所述连接块 通过第一铰接机构铰接有第一抓盘, 所述第一抓盘底部设有若干第一吸盘,所述第一抓盘 一侧设有第二铰接机构, 所述第一抓盘通过第二铰接机构铰接有第二抓盘,所述第二抓盘 底部设有若 干第二吸盘; 所述躯干机构底部设有第二驱动机构,所述第二驱动机构铰接有腿部连 接机构, 所述腿部连接机构设有第三驱动机构,所述腿部连接机构底部连接 有液压伸缩机构,所述 躯干机构底部嵌设有减震座,所述减震座内腔顶部固 定连接有尼阻器,所述尼阻器底部固 定连接有滑杆,所述滑杆外侧壁套设有 滑套,所述滑套外侧壁嵌设有固定板,所述固定板 两侧与减震座内腔两侧固 定连接,所述滑杆底端和液压伸缩杆机构底端均固定连接有履 带行走机构, 所述躯干机构一侧设有尾部主驱动机构,所述尾部主驱动机构一侧铰接有尾 部机构,所述尾部机构之间设有若干调向电机,所述尾部机构末端固定连接 有尾部摄像 头。 红外摄像头和高清摄像头能够采集路面信息为中央处理器,中央处理器 对路况 3 CN 111590624 A 说 明 书 2/5 页 进行实时分析判断后,通过第二驱动机构和第三驱动机构调整腿部连 接机构转动对躯干 机构进行角度调整,同时尾部主驱动机构根据躯干机构的 俯仰角度调整尾部配重角度,同 时调向电机能够通过转动调整多节尾部的朝 向,角度调整之后,履带行走结构工作带动躯 干机构以及腿部连接机构运动 前进,当前方有障碍物时,能够通过液压伸缩杆结构调整腿 部连接机构朝向 进行跨越,同时手臂机构能够通过转轴和第一铰接机构以及第二铰接机 构调 整第一抓盘和第二抓盘的位置,当第一抓盘和第二抓盘与障碍物贴合时,模 仿章鱼 触手设置的若干第一吸盘和第二吸盘连接的真空吸附装置工作抓取障 碍物,且通过尾部 主驱动机构增大整体躯干机构配重效果,从而能够快速移 动障碍物或抓取转移物,提高整 体移动稳定性,有效满足使用需要。 在一个优选的实施方式中,所述第一吸盘和第二吸盘与真空吸附装置相 连接,保 证抓取后的吸附效果。 在一个优选的实施方式中,所述固定板顶部两侧均固定连接有第二弹簧, 所述第 二弹簧与减震座内腔底部固定连接,进一步提高抗震能力。 在一个优选的实施方式中,所述液压伸缩杆机构通过油路与内部液压缸 相连接, 方便调整躯干朝向位置。 在一个优选的实施方式中,所述第一驱动机构、第二驱动机构和第三驱 动机构均 为液压驱动机构,方便检修维护。 在一个优选的实施方式中,所述第一吸盘和第二吸盘均为真空吸盘,保 证吸取能 力。 在一个优选的实施方式中,所述滑杆和滑套的横截面形状均为圆形,提 高滑动稳 定性。 在一个优选的实施方式中,所述第一抓盘和第二抓盘均为塑胶盘,保证 贴合效 果。 1、本发明通过设置第一抓盘、第二抓盘和尾部机构,红外摄像头和高清 摄像头能 够采集路面信息,通过第二驱动机构和第三驱动机构对躯干机构进 行角度调整,同时尾部 主驱动机构调整尾部配重角度,履带行走结构工作带 动躯干机构以及腿部连接机构运动 前进,并通过液压伸缩杆结构调整腿部连 接机构朝向进行跨越,同时手臂机构模仿章鱼触 手设置的若干第一吸盘和第 二吸盘连接的真空吸附装置工作抓取障碍物,且通过尾部主 驱动机构增大整 体躯干机构配重效果,与现有技术相比能够快速移动障碍物或抓取转移 物, 提高整体移动稳定性,有效满足使用需要; 2、本发明通过设置滑杆、滑套和尼阻器,履带行走机构通过底部滑杆在 滑套内滑 动与尼阻器连接,当底部履带行走机构运动产生振动时,滑杆受力 移动挤压尼阻器和两侧 第二弹簧,尼阻器能够有效吸收履带行走机构的振动, 避免振动传导至躯干机构造成的损 害,满足了使用需要。 附图说明 图1为本发明的正视结构示意图。 图2为本发明的图1中A部分放大示意图。 图3为本发明的图1中B部分放大示意图。 4 CN 111590624 A 说 明 书 3/5 页 图4为本发明的图1中C部分放大示意图。 图5为本发明的第一抓盘立体结构示意图。 图6为本发明的固定座立体结构示意图。 图7为本发明的尾部机构立体结构示意图。 附图标记为:1躯干机构、2头体、3收声机构、4红外摄像头、5高清摄 像头、6第一驱 动机构、7尾部主驱动机构、8手臂机构、9固定座、10滑槽、 11滑块、12滑板、13伸缩杆、14第 一弹簧、15连接杆、16转轴、17轴承、 18连接块、19第一铰接机构、20第一抓盘、21第一吸盘、 22第二铰接机构、 23第二抓盘、24第二吸盘、25第二驱动机构、26第三驱动机构、27腿部连 接机构、28液压伸缩机构、29履带行走机构、30减震座、31尼阻器、32滑 杆、33滑套、34第二 弹簧、35固定板、36调向电机、37尾部机构、38尾部 摄像头。











