
技术摘要:
本申请提供了一种伺服电机驱动控制方法、装置、电子设备及存储介质。该伺服电机驱动控制方法,包括以下步骤:获取所述伺服电机的目标转速;根据所述目标转速获取对应输出给所述伺服电机的第一驱动电压,并采用所述第一驱动电压对所述伺服电机进行驱动;获取所述伺服电 全部
背景技术:
伺服电机也即是永磁同步电动机广泛应用于各种领域,作为动力源进行动力输 出,例如,在汽车、智能机器人以及传送机构等领域。 目前常见的驱动器转速控制指令接口,均采用模拟量指令接口,即上位机通过发 送一模拟量信号,如发送电压值为-10V~ 10V的模拟量信号来线性地控制伺服电机的转速 (如-3000rpm~3000rpm)。 现有技术中,由于电机老化或者其他各种误差导致提供给伺服电机的驱动电压得 到的实际转速与目标转速误差较大。 因此,现有技术急需存在缺陷,急需改进。
技术实现要素:
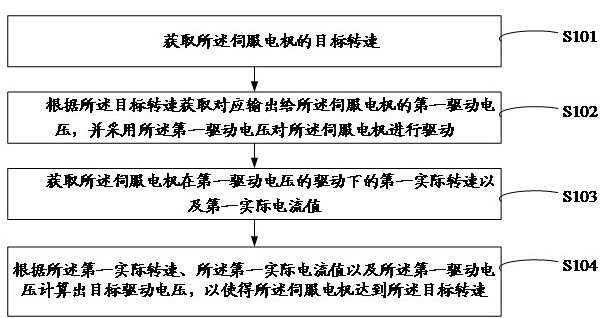
本申请实施例的目的在于提供一种伺服电机驱动控制方法、装置、电子设备及存 储介质,可以提高转速的准确度。 第一方面,本申请实施例提供了一种伺服电机驱动控制方法,包括以下步骤: 获取所述伺服电机的目标转速; 根据所述目标转速获取对应输出给所述伺服电机的第一驱动电压,并采用所述第一驱 动电压对所述伺服电机进行驱动; 获取所述伺服电机在第一驱动电压的驱动下的第一实际转速以及第一实际电流值; 根据所述第一实际转速、所述第一实际电流值以及所述第一驱动电压计算出目标驱动 电压,以使得所述伺服电机达到所述目标转速。 可选地,在本申请实施例所述的伺服电机驱动控制方法中,所述根据所述第一实 际转速、所述第一实际电流值以及所述第一驱动电压计算出目标驱动电压,以使得所述伺 服电机达到所述目标转速的步骤包括: 根据所述第一实际转速以及所述目标转速计算转速差值; 根据所述第一实际电流值、所述第一驱动电压以及所述转速差值计算所述伺服电机的 老化程度,以得到对应的老化程度系数; 根据所述老化程度系数对所述第一驱动电压进行优化,以得到目标驱动电压。 可选地,在本申请实施例所述的伺服电机驱动控制方法中,所述根据所述第一实 际电流值、所述第一驱动电压以及所述转速差值计算所述伺服电机的老化程度,以得到对 应的老化程度系数的步骤包括: 获取预设网络模型; 将所述第一实际电流值、所述第一驱动电压以及所述转速差值输入所述预设网络模 4 CN 111600526 A 说 明 书 2/6 页 型,以得到对应的老化程度系数。 可选地,在本申请实施例所述的伺服电机驱动控制方法中,所述获取预设网络模 型的步骤包括: 获取历史网络模型; 根据预设时间段内的历史数据样本对所述历史网络模型进行优化,以得到预设网络模 型,所述历史数据样本包括以当前时间为终点的预设时间段内的多个数据样本,每一数据 样本包括第一实际电流值、第一驱动电压、转速差值及对应的老化程度系数。 可选地,在本申请实施例所述的伺服电机驱动控制方法中,所述获取所述伺服电 机在第一驱动电压的驱动下的第一实际转速,包括: 获取所述伺服电机的角速度传感器在第一预设时长内上传的多个第一转速值; 根据所述多个第一转速值计算所述伺服电机的第一实际转速。 第二方面,本申请实施例还提供了一种伺服电机驱动控制装置,包括: 第一获取模块,用于获取所述伺服电机的目标转速; 第二获取模块,用于根据所述目标转速获取对应输出给所述伺服电机的第一驱动电 压,并采用所述第一驱动电压对所述伺服电机进行驱动; 第三获取模块,用于获取所述伺服电机在第一驱动电压的驱动下的第一实际转速以及 第一实际电流值; 计算模块,用于根据所述第一实际转速、所述第一实际电流值以及所述第一驱动电压 计算出目标驱动电压,以使得所述伺服电机达到所述目标转速。 可选地,在本申请实施例所述的伺服电机驱动控制装置中,所述计算模块包括: 第一计算单元,用于根据所述第一实际转速以及所述目标转速计算转速差值; 第二计算单元,用于根据所述第一实际电流值、所述第一驱动电压以及所述转速差值 计算所述伺服电机的老化程度,以得到对应的老化程度系数; 优化单元,用于根据所述老化程度系数对所述第一驱动电压进行优化,以得到目标驱 动电压。 可选地,在本申请实施例所述的伺服电机驱动控制装置中,所述优化单元用于:获 取预设网络模型;将所述第一实际电流值、所述第一驱动电压以及所述转速差值输入所述 预设网络模型,以得到对应的老化程度系数。 第三方面,本申请实施例还提供了一种电子设备,包括处理器以及存储器,所述存 储器存储有计算机可读取指令,当所述计算机可读取指令由所述处理器执行时,运行如上 述任一所述方法中的步骤。 第四方面,本申请实施例还提供了一种存储介质,其上存储有计算机程序,其特征 在于,所述计算机程序被处理器执行时运行如上述任一所述方法中的步骤。 由上可知,本申请实施例通过获取所述伺服电机的目标转速;根据所述目标转速 获取对应输出给所述伺服电机的第一驱动电压,并采用所述第一驱动电压对所述伺服电机 进行驱动;获取所述伺服电机在第一驱动电压的驱动下的第一实际转速以及第一实际电流 值;根据所述第一实际转速、所述第一实际电流值以及所述第一驱动电压计算出目标驱动 电压,以使得所述伺服电机达到所述目标转速,从而实现对伺服的驱动电压进行调整及控 制,可以提高转速的精确度,避免由于伺服电机老化造成的误差。 5 CN 111600526 A 说 明 书 3/6 页 本申请的其他特征和优点将在随后的说明书阐述,并且,部分地从说明书中变得 显而易见,或者通过实施本申请实施例了解。本申请的目的和其他优点可通过在所写的说 明书、权利要求书、以及附图中所特别指出的结构来实现和获得。 附图说明 为了更清楚地说明本申请实施例的技术方案,下面将对本申请实施例中所需要使 用的附图作简单地介绍,应当理解,以下附图仅示出了本申请的某些实施例,因此不应被看 作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以 根据这些附图获得其他相关的附图。 图1为本申请实施例提供的伺服电机驱动控制方法的一种流程图。 图2为本申请实施例提供的伺服电机驱动控制装置的一种结构示意图。 图3为本申请实施例提供的电子设备的结构示意图。











