
技术摘要:
一种基于球面相机阵列生成立体元图像阵列的方法属集成成像技术领域,本发明包括下列步骤:对球面相机阵列进行标定,消除畸变;使用球面相机阵列对实际场景进行拍摄,得到不同角度的多视点图像;利用光学映射原理,将不同角度的多视点图像转化成低分辨立体元图像阵列; 全部
背景技术:
集成成像技术作为一种真三维显示技术,无需借助设备即可为观看者再现三维场 景,是目前发展前景最好的立体显示技术之一。传统的透镜阵列采集法,由于光线的干扰, 生成的立体元图像阵列质量并不理想。对实际场景进行三维重建一直都是研究的热点,但 传统的相机阵列采集法需要大量的摄像机,成本较高且数据量巨大,而计算机建模的方法 只能对虚拟物体进行重建,因此如何使用稀疏相机阵列,对实际场景进行重建成为了研究 的重点。
技术实现要素:
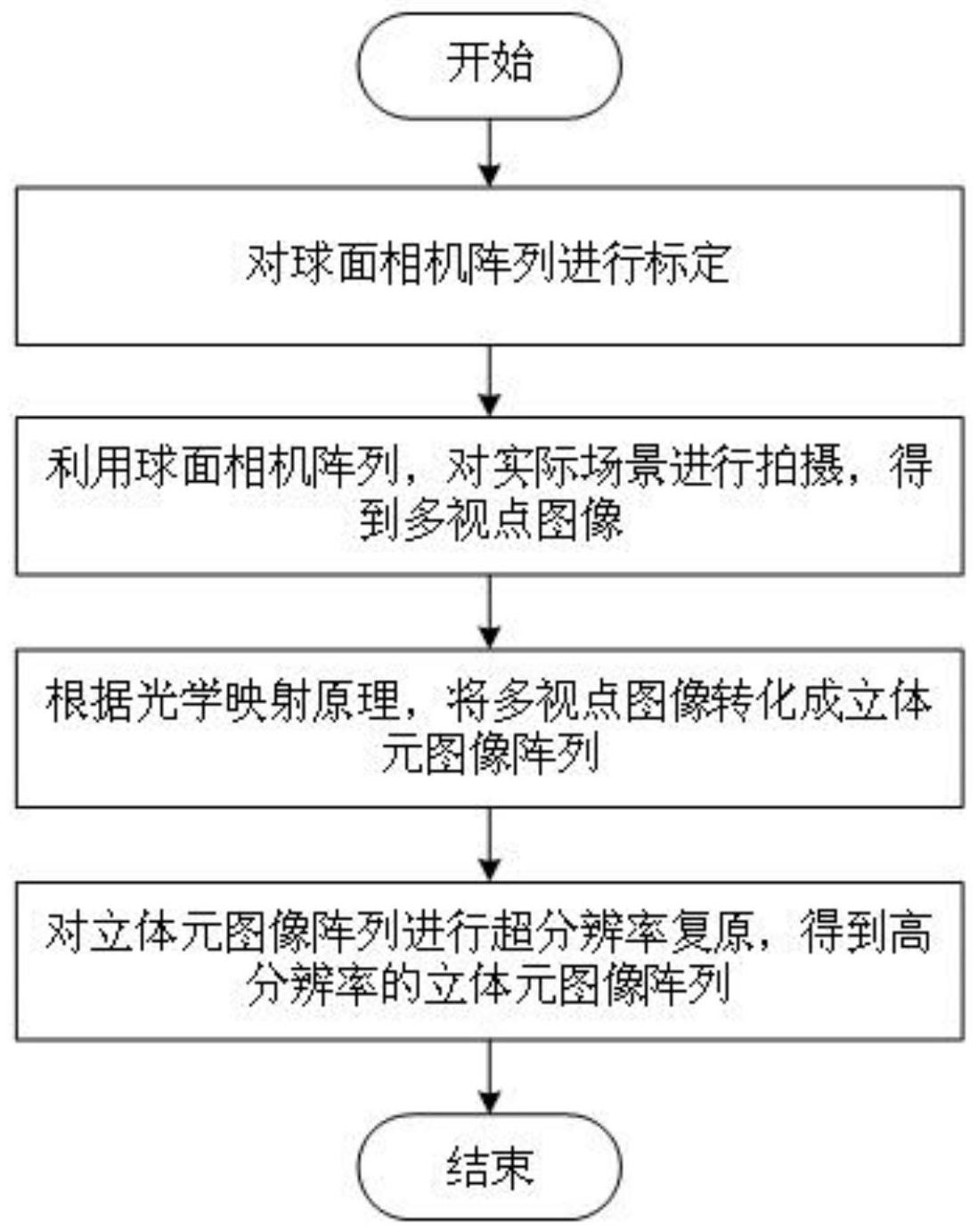
本发明的目的在于提供一种能实现由稀疏球面相机阵列生成立体元图像阵列,并 将生成的较低分辨率的立体元图像阵列进行超分辨率复原,得到高分辨率立体元图像阵列 的方法。 本发明的基于球面相机阵列生成立体元图像阵列的方法,包括下列步骤: 1.1对分布在半径为2.5米的4×4球面的相机阵列进行标定,包括下列步骤: 1.1.1设定标定板姿态:根据16组标定图像的需求设定16个标定板姿态,其中第一 至第八个姿态主要在距离相机阵列2.5m处的公共视场范围内移动,第九至第十六姿态主要 沿视场中心线前后景深范围(2.1m至3.1m)内移动; 1 .1 .2采集标定图像:打开球面相机阵列采集系统,调整标定板位置到第一姿态, 采集并保存第一组标定图像,依次将标定板位置调整到16个姿态,采集并保存16组标定图 像,得到标定参数并保存。 1.2使用分布在半径为2.5米的4×4球面的相机阵列对真实场景进行拍摄,得到不 同视角的多视点图像,将采集物体置于球面相机阵列的球心处,以方便得到拍摄效果较好 的图像,调整光源位置,利用球面相机阵列采集系统进行图像采集,得到16幅不同视角的多 视点图像; 1.3根据光学映射原理,将多视点图像转化成立体元图像阵列,其特征在于包括下 列步骤: 1.3.1将所有多视点图像中每一幅图像同一位置的像素提取出来得到一幅立体元 图像; 1.3.2对任一幅多视点图像,将所有上述立体元图像替换其对应位置的像素,得到 立体元图像阵列。 1 .4利用神经网络对立体元图像阵列进行超分辨率复原,得到高分辨率的立体元 图像阵列,其特征在于包括下列步骤: 3 CN 111586316 A 说 明 书 2/2 页 1 .4.1搭建卷积神经网络图像超分辨率复原算法的网络模型(FSRCNN),对模型中 的参数进行训练,选取FSRCNN网络模型中的单位卷积核; 1.4.2将超分辨率复原倍数和低分辨率立体元图像阵列输入到训练好的卷积神经 网络中,得到重建的高分辨率立体元图像阵列。 本发明能实现由稀疏球面相机阵列生成立体元图像阵列,并将生成的较低分辨率 的立体元图像阵列进行超分辨率复原,得到高分辨率的立体元图像阵列,并可以进行重现, 实现对真实场景的三维重构,同时能避免大量摄像机的使用,使拍摄成本明显降低,计算量 大幅度减少。 附图说明 图1为基于球面相机阵列生成立体元图像阵列方法的流程图 图2为球面相机阵列采集系统示意图 图3为多视点图像阵列与立体元图像阵列映射示意图 图4为最终生成的立体元图像阵列 其中:1.服务器 2.拍摄对象 3.舞台 4.标定板 5.摄像机框架 6.多视点图像 7. 立体元图像阵列 8.立体元图像











