
技术摘要:
一种智能网联甩挂系统,包括调度平台、半挂车辆、半挂车端T‑BOX、半挂车端控制器、牵引车辆、牵引车端T‑BOX数据交互终端、驾驶员手机APP。半挂车辆在传统半挂车上增加发电装置、蓄电池、电动举升腿、半挂车端数据终端、半挂车端控制器、电控制动系统、灯光及信号系统 全部
背景技术:
甩挂运输是指汽车列车按预定的计划,在各装卸作业点甩下并挂上指定的半挂 车,继续运行的一种组织方式。可使载货汽车(或牵引车)的停歇时间缩短到最低限度,从而 可最大限度地利用牵引能力,提高运输效能。在同样的条件下,可比定挂运输有较高的运输 效率。甩挂运输适用于运距较短、装卸能力不足且装卸停歇时间占汽车列车运行时间的比 重较大的情况。 在多半挂车、多牵引车协同作业的场景,如港口、货物堆场、物流中心等,牵引车需 要申请拖挂任务或获得拖挂任务分配,然后查找目标半挂车的位置;当牵引车靠近半挂车 时,首先需要人员操作半挂车支撑臂升降,使得半挂车牵引销较牵引车牵引盘稍高,然后牵 引车调整位置使牵引盘与半挂车牵引销对正,牵引车倒车完成牵引车与半挂车连接,最后 完成半挂车与牵引车信号及电气路等的连接。在半挂车与牵引车脱离过程中,需要手动解 锁牵引车与半挂车的机械锁止装置、断开信号及电气路等的连接,然后脱离牵引车,最后调 整半挂车高度至作业高度。 在传统的作业场景下,使用常规的任务调度系统获取调度任务,任务统计难度大、 自动化程度低;牵引车常规的实地寻找半挂车操作,效率低下,无法快速准确找到半挂车; 手动牵引车及半挂车对接及分离过程,操作繁琐且复杂度高,常常需要两人以上完成全部 操作;以上作业及操作过程较为繁琐,自动化程度低,目前迫切需要一种智能网联化的甩挂 系统,通过机电一体化的自动化操作,提高作业准确度、提高工作效率、降低人员开支及工 作强度。
技术实现要素:
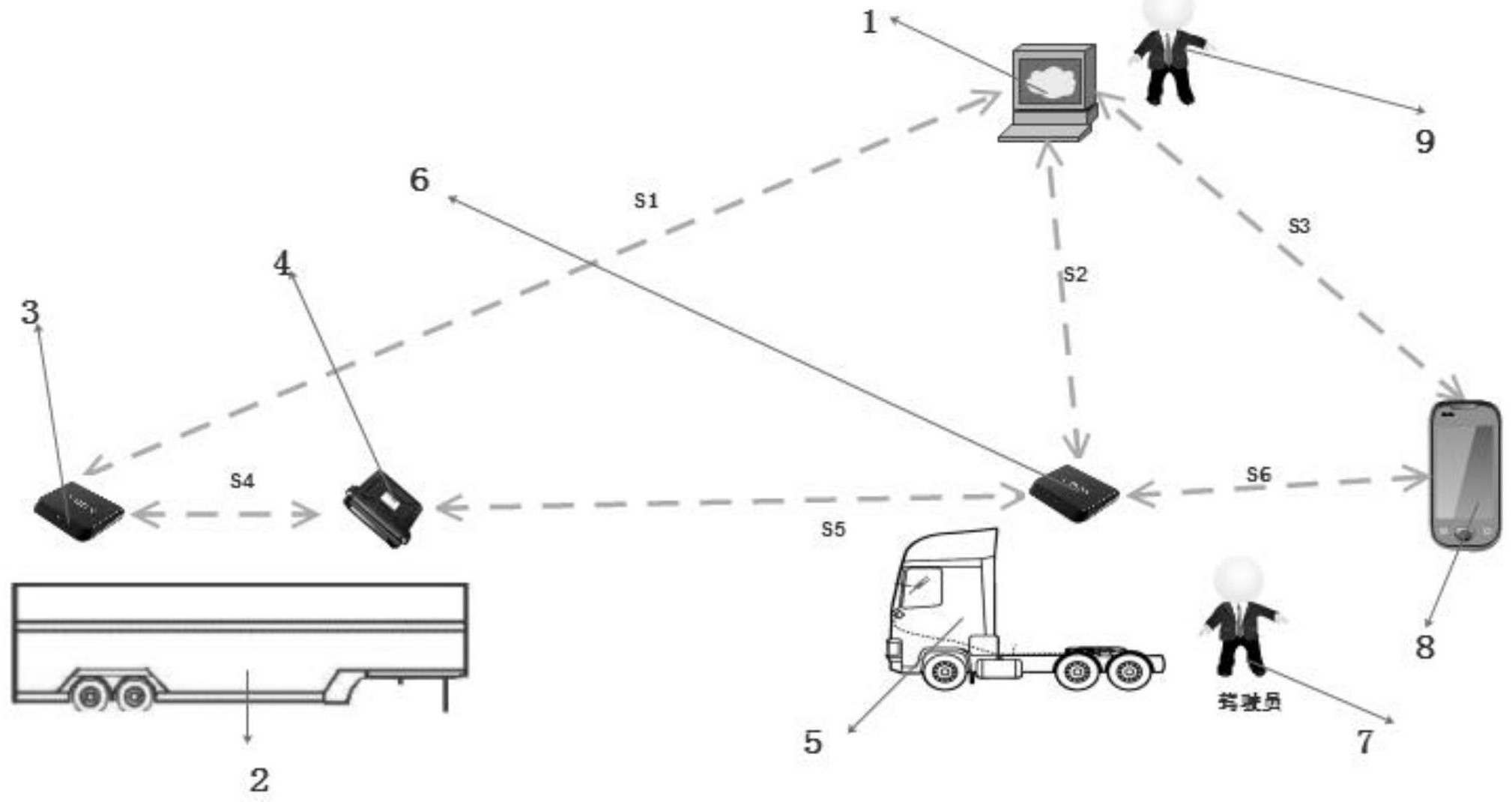
针对上述现有技术中存在的问题,本发明旨在提供一种智能网联甩挂系统及其调 度方法,用以解决传统快速甩挂场景下,频繁进行半挂车与牵引车任务调度、牵引车频繁寻 找半挂车、牵引车频繁装挂及卸挂等过程中自动化程度不高、安全性低、操作繁琐、人员劳 动强度大等问题。 为了实现上述目的,本发明采取如下技术方案: 一种智能网联甩挂系统,包括调度平台、半挂车辆、半挂车端T-BOX、半挂车端控制 器、牵引车车辆、牵引车端T-BOX数据交互终端、驾驶员、驾驶员手机APP。 所述调度平台为运行调度系统,包括但不局限于牵引车及半挂车状态查看、实时 任务调度、手动任务调整、自动报表等功能。 所述半挂车车辆为甩挂作业车辆,在传统的半挂车基础上,增加发电装置、蓄电 池、电动举升腿、半挂车端数据终端、半挂车端控制器、电控制动系统、灯光及信号系统等。 3 CN 111582789 A 说 明 书 2/6 页 所述发电装置在车辆行驶过程中自动发电,为所述半挂车辆的所述蓄电池及其他 用电设备提供电能。 所述蓄电池为半挂车存储电能,为半挂车长时间停车状态上报、用电设备长时间 工作提供电能储备。 所述半挂车端控制器为所述半挂车辆实现控制策略的物理载体,与所述发电装 置、所述蓄电池、所述电动举升腿、所述半挂车端数据终端、所述半挂车端控制器、所述电动 制动系统、所述灯光及信号通过线束相连,具备近距离无线通讯功能,优选Wifi或蓝牙通 讯。 所述电动举升腿替换传统半挂车的前机械举升装置,受所述半挂车端控制器控 制,实现半挂车辆前端升降操作。 所述电控制动系统接收所述半挂车端控制器的制动指令,执行挂车制动操作。 所述半挂车端数据终端与所述半挂车辆一一配对,实时获取包括但不局限于所述 半挂车的位置、实时车速等信息,具备无线通讯功能,实时向调度平台上报半挂车状态信 息,包含但不局限于蓄电池电压、半挂车位置、半挂车实时车速、半挂车部件故障状态等;实 时从调度平台获取配对码信息。 所述牵引车辆为牵引作业车辆,安装有所述牵引车端T-BOX数据交互终端,由所述 驾驶员驾驶,所述驾驶员操作所述驾驶员手机APP。 所述牵引车端T-BOX数据交互终端,与整车信号线束相连,具有唯一标识且与所述 牵引车辆一一配对,具备远距离无线通讯功能,采集、获取并向平台上报包括但不局限于所 述牵引车辆位置、当前车速、发动机转速、转向灯信号、制动灯信号、倒车灯信号、雾灯信号、 示廓灯信号、制动踏板行程或制动气缸压力、驻车制动等信息;具备近距离通讯功能,与所 述半挂车端控制器配对并进行信号实时传输,优选Wifi或蓝牙通讯。 所述驾驶员手机APP安装在驾驶员手机或其他设备上,具有远距离通讯功能,从平 台获取包括但不局限于所述驾驶员账户登录信息、拖挂任务、目标挂车配对码、任务报表等 信息。 进一步地,所述驾驶员手机APP还具有配对所述半挂车辆的控制界面,包括但不局 限于所述半挂车辆所述电动举升腿升降控制界面。 本发明所提供的的一种智能网联甩挂调度方法,其中调度方法包括但不局限于: F1:所述驾驶员上岗后,操作所述驾驶员手机APP扫描所述牵引车辆识别码,完成 所述驾驶员与所述牵引车辆的绑定及到岗打卡;所述驾驶员手机APP包括但不局限于驾驶 员身份认证、驾驶员任务查询、目标所述牵引车辆位置、目标所述牵引车辆实时状态、配对 所述牵引车辆举升控制等功能。 F2:所述调度平台根据规则或者管路员操作生成调度任务,将任务按工作主体生 成任务信息,生成任务信息分别发送到所述半挂车T-BOX终端、所述牵引车T-BOX终端、所述 驾驶员手机APP。 F3:所述驾驶员查阅所述驾驶员手机APP中的当前任务及作业目标所述半挂车辆 的位置信息,驾驶所述牵引车辆至所述半挂车辆周围时,所述牵引车端T-BOX数据交互终端 自动搜索所述半挂车端控制器的无线信号,信号稳定时所述牵引车端T-BOX数据交互终端 向所述驾驶员手机APP推送连接请求,所述驾驶员输入单次任务配对码后所述驾驶员手机 4 CN 111582789 A 说 明 书 3/6 页 APP向所述牵引车端T-BOX数据交互终端确认连接请求,此时所述牵引车端T-BOX数据交互 终端与所述半挂车端控制器建立连接并交互信息。 F4:所述驾驶员操作所述驾驶员手机APP实现本次任务配对所述半挂车辆的所述 电动举升腿的升降,所述驾驶员调整所述牵引车位置实现所述牵引车辆与所述半挂车辆对 正及机械对接,同常规牵引车与半挂车对接,所述牵引车辆的牵引盘与所述半挂车辆的牵 引销对接成功后机械锁止装置触发并锁止;所述驾驶员通过操作所述驾驶员手机APP收起 所述电动举升腿至安全高度,此时本系统中所述牵引车端控制器采集机械连接锁止信号及 举升腿高度信号,控制所述半挂车辆的所述电控制动系统、所述灯光信号系统由原地驻车 制动模式切换到牵引车信号跟随模式。 F5:所述驾驶员驾驶所述半挂车辆与所述牵引车辆组成的整车行驶,至目的地后, 所述驾驶员通过操作所述驾驶员手机APP实现所述电动举升腿升起,下车后手动解锁所述 牵引车辆牵引盘机械锁止装置,所述半挂车端控制器采集到的解锁信号后控制所述电控制 动系统、所述信号及灯光系统由牵引车信号跟随模式切换到原地驻车模式,所述驾驶员驾 驶所述牵引车辆即完成所述牵引车辆与所述半挂车辆的脱离,手动点击所述驾驶员手机 APP完成任务按钮即结束本次任务。 进一步地,F2中所述调度平台发送至所述半挂车T-BOX终端的任务信息包括但不 局限于目标作业所述牵引车辆的唯一识别码。 进一步地,F2中所述调度平台发送至所述牵引车T-BOX终端的任务信息包括但不 局限于车辆锁止功能。 进一步地,F2中所述调度平台发送至所述驾驶员手机APP的任务信息包括但不局 限于目标作业所述半挂车辆的位置、状态信息、单次任务配对码等。 本发明的有益效果为: 1.通过平台进行牵引车及半挂车状态的实时查看的及任务调度,手动或者按规则 进行拖挂任务的分配及调整,平台自动生成相关报表信息,便于任务统筹及管理; 2.牵引车驾驶员通过手机APP实时查看当前任务、目标半挂车位置、半挂车配对码 等,通过手机APP对已配对的半挂车进行升降操作,查看实时状态信息;同时报表输出任务 统计数据;大大减少驾驶员查找半挂车位置、手动进行牵引车与半挂车机械对接、牵引车与 半挂车信号及电气对接等劳动强度及作业时间; 3.半挂车独立状态下与平台实施更新配对信息,驾驶员通过手机APP接收到拖挂 任务后获取目标半挂车的实时配对码,牵引车到达半挂车附近时,无线搜索半挂车终端并 手动完成牵引车及半挂车配对确认,大大提高半挂车与牵引车之间配对及信号传输的安全 性; 4.牵引车与配对的半挂车之间通过无线进行信号的实时传输,包括各类指示类信 号,同时可自定义相关信号,提高适用范围; 5 .半挂车自带发电装置、蓄电池、电动举升腿、数据终端、控制终端、电控制动系 统、灯光系统等,通过无线接收配对牵引车整车信号及制动等控制指令,接收配对的APP的 举升等信息,同时半挂车自主反馈半挂车各零部件实时状态信息至牵引车、手机APP及平 台;半挂车与牵引车之间无需进行信号、电源、气路等手动线束下车手动连接,降低劳动强 度; 5 CN 111582789 A 说 明 书 4/6 页 6.当半挂车或牵引车出现故障时,半挂车或牵引车端的数据终端自动将数据上传 至平台,平台端、APP端等自动提醒管理员及驾驶员,严重故障时,停止分配拖挂任务,提高 人员、车辆、货物的安全性。 附图说明 图1为本发明结构示意图。 附图标记:1-调度平台,2-半挂车辆,3-半挂车端T-BOX,4-半挂车端控制器,5-牵 引车辆,6-牵引车端T-BOX数据交互终端,7-驾驶员,8-驾驶员手机APP,9-调度人员。











