
技术摘要:
本发明公开了一种基于多源异构传感器信息的交通行为融合系统,包括信息采集单元、多源信息数据库、交通行为匹配单元、行为融合单元和交通行为输出单元。以及基于上述融合系统的融合方法,利用现有的多种传感器作为多源信息的采集设备,将其检测的交通行为收集至多源信 全部
背景技术:
随着行为检测技术的快速发展,利用图片、视频、雷达等技术监测交通行为的案例 越来越多,现有雷达-视频一体化系统,雷达和视频各自检测目标的物理参数,然后在参数 层面去融合,实现行为的检测,且这些单项技术在车辆遮挡、光照变化、杂波干扰等复杂情 况和雨雪、雾霾等恶劣天气时容易出现对交通行为的漏检或虚警问题。
技术实现要素:
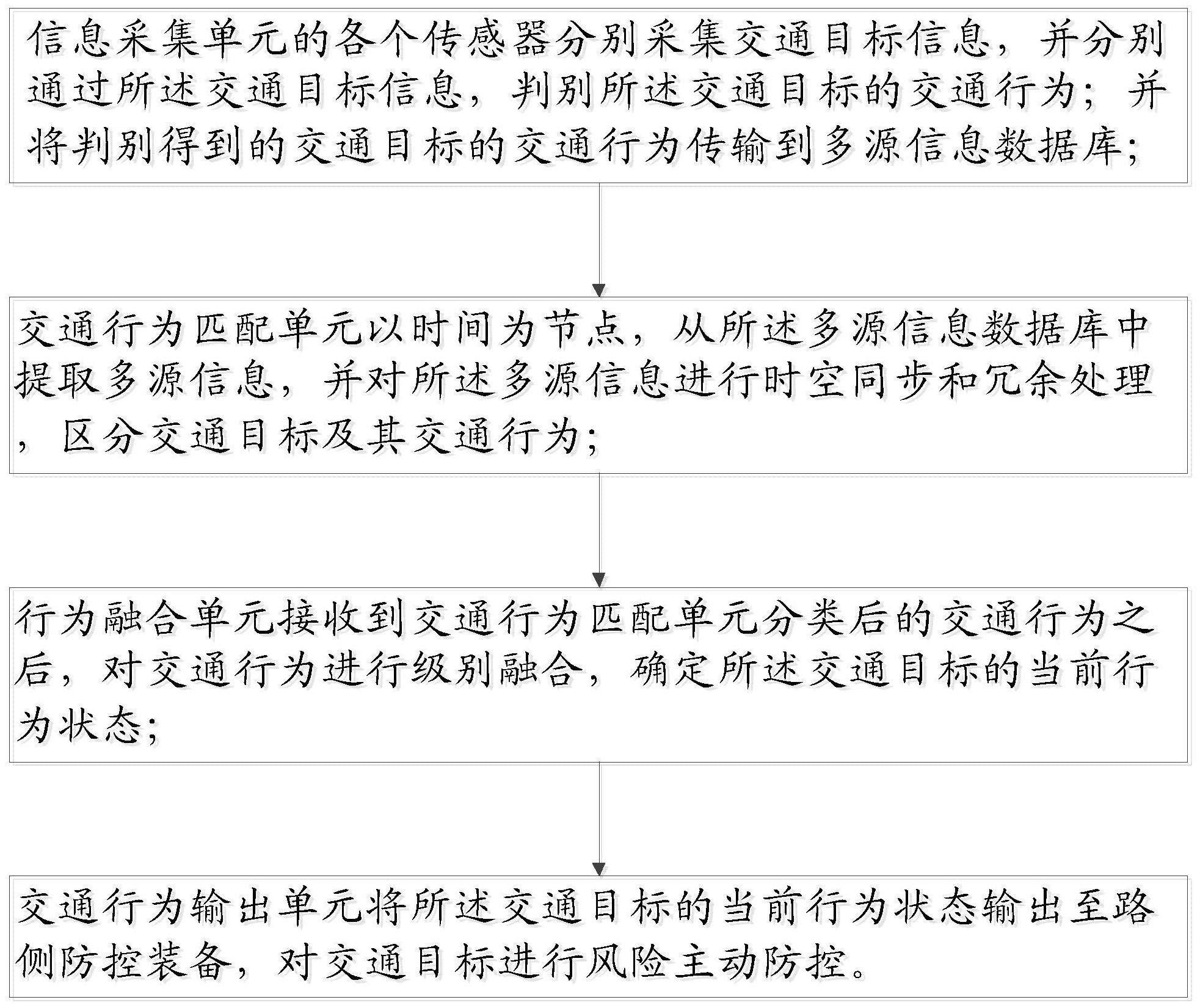
针对现有技术中存在的问题,本发明的目的在于提供一种基于多源异构信息的交 通行为感知融合系统及方法,可提高交通行为感知检测的精确度和速度,并可增强检测系 统在不良检测环境的适应度。 为达到上述目的,本发明采用以下技术方案予以实现。 技术方案一: 一种基于多源异构信息的交通行为感知融合系统,包括信息采集单元、多源信息 数据库、交通行为匹配单元、行为融合单元和交通行为输出单元; 其中,所述信息采集单元的输出端连接所述多源信息数据库的输入端,所述多源 信息数据库的输出端连接所述交通行为匹配单元的信息输入端,所述交通行为匹配单元的 信息输出端连接所述行为融合单元的信息输入端;所述行为融合单元的信息输出端连接所 述交通行为输出单元的输入端。 所述信息采集单元用于采集目标信息,并通过所采集得到的目标信息,判别目标 的交通行为; 所述多源信息数据库用于存储信息采集单元所判别得到的目标的交通行为; 所述交通行为匹配单元用于对所述多源信息数据库中所存储的多源信息进行处 理,对交通行为进行分类; 所述行为融合单元用于对所述交通行为匹配单元分类后的交通行为进行融合,确 定当前时间节点交通目标的交通行为; 所述交通行为输出单元用于将行为融合单元所确定的当前时间节点交通目标的 交通行为传输至交通目标,对交通目标的行为进行校正和主动防控。 技术方案二: 一种基于多源异构信息的交通行为感知融合方法,基于上述的基于多源异构信息 的交通行为感知融合系统,包括以下步骤: 步骤1,信息采集单元的各个传感器分别采集交通目标信息,并分别通过所述交通 目标信息,判别所述交通目标的交通行为;并将判别得到的交通目标的交通行为传输到多 4 CN 111582130 A 说 明 书 2/5 页 源信息数据库; 步骤2,交通行为匹配单元以时间为节点,从所述多源信息数据库中提取多源信 息,并对所述多源信息进行时空同步和冗余处理,区分交通目标及其交通行为; 步骤3,行为融合单元接收到交通行为匹配单元分类后的交通行为之后,对交通行 为进行级别融合,确定所述交通目标的当前行为状态; 步骤4,交通行为输出单元将所述交通目标的当前行为状态输出至路侧防控装备, 对交通目标进行风险主动防控。 本发明技术方案二的特点和进一步的改进在于: 步骤1中,所述交通目标的交通行为用输出概率函数f(x,y)表示,其中,x表示某种 传感器,x=1,2,…q;y表示某种具体的交通行为,y=1,2,…n;q,n为正整数。 步骤2中,对于每一类交通行为,采用专家打分法预先确定每种传感器对这种交通 行为的联合表征度K; 当某种传感器出现故障或者受到干扰时,该传感器会输出干扰数据点,通过对联 合表征度K进行分析,确定该数据点的行为真实度M;其中,M=x1·K x2·K … xq·K,n为正 整数,代表交通行为的种类; 如果该数据点的行为真实度M小于阈值,则认为该数据点为干扰数据点,需要剔 除。 步骤3具体为: 首先确定每个交通行为概率函数f(x,y)所对应的可信度矩阵P; 然后根据所述可信度矩阵P,获得行为融合结果可信度T; 其中,T=[f(x1,yn),f(x2,yn),…,f(xq,yn)]·P。 步骤4中,首先确定某种具体的交通行为的可信度阈值,当行为融合结果可信度T 大于所述阈值时,认为当前存在所述具体的交通行为,并将所述具体的交通行为识别结果 输出至路侧防控装备,对交通目标进行风险主动防控。 与现有技术相比,本发明的有益效果为: 本发明的基于多源异构信息的交通行为感知融合方法基于行为层面的融合,通过 对多种传感器所检测的交通行为融合,结合了各项行为检测技术的优点,提高了行为检测 的准确性,避免了单种传感器所存在的缺陷,将多种传感器的技术优点相互融合,实现了基 于多源异构信息的多层次、多模态检测交通行为的行为融合方法。 本发明无需添加其他新的行为检测传感器,结合现有的传感器优点,提高了交通 行为检测的准确性,成本低,可靠性高,对于后期危险及不良交通行为的矫正和主动防控具 有实际应用价值。 附图说明 为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现 有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本 发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以 根据这些附图获得其他的附图。 图1为本发明的基于多源异构信息的交通行为感知融合方法的一种实施例的流程 5 CN 111582130 A 说 明 书 3/5 页 示意图。











