
技术摘要:
本发明实施例公开了一种坡度估计方法、装置、设备及车辆。包括:根据车辆的行驶速度确定车辆的第一加速度信息;获取车身电子稳定系统检测到的第二加速度信息;根据所述第一加速度信息和所述第二加速度信息确定初始估计坡度;根据所述第一加速度信息确定坡度修正系数; 全部
背景技术:
现代车辆控制系统包含有多个子系统,车辆控制效果不仅仅取决于整车控制器的 控制,而且还需要依赖采集的车辆参数信息,车辆各个系统在进行参数估计时需要利用车 辆和环境信息,如果一些未知的环境参数可以被实时估计到,不仅可以改善车辆控制模型 的精度,而且能够有效改善车辆控制效果。车辆行驶路面的坡度信息对于车辆的导航、主动 安全控制和驱动力控制都是非常重要的。
技术实现要素:
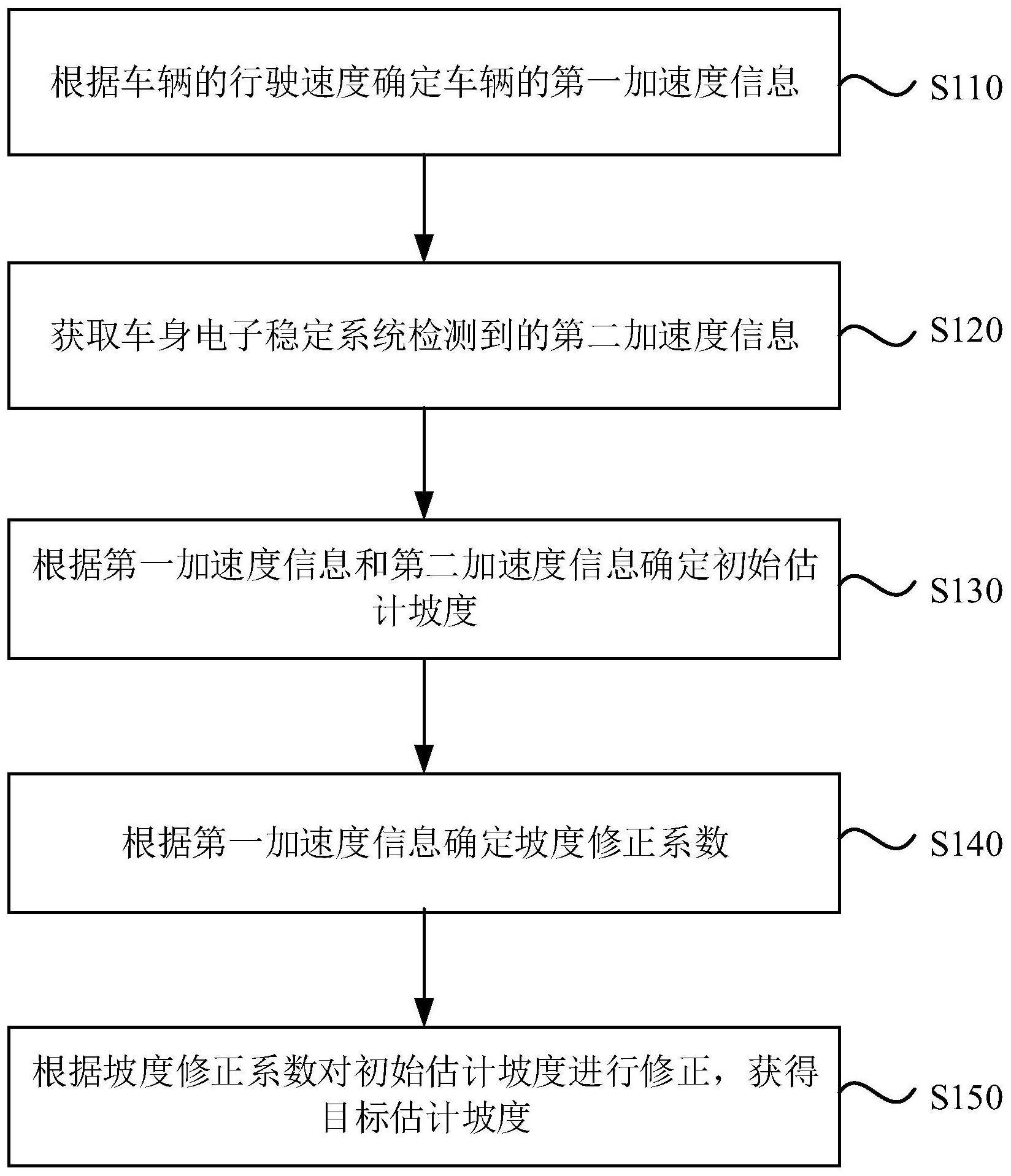
本发明实施例提供一种坡度估计方法、装置、设备及车辆,可以提高车辆行驶过程 中坡度估计的准确性。 第一方面,本发明实施例提供了一种坡度估计方法,包括: 根据车辆的行驶速度确定车辆的第一加速度信息; 获取车身电子稳定系统检测到的第二加速度信息; 根据所述第一加速度信息和所述第二加速度信息确定初始估计坡度; 根据所述第一加速度信息确定坡度修正系数; 根据所述坡度修正系数对所述初始估计坡度进行修正,获得目标估计坡度。 进一步地,根据车辆的行驶速度计算车辆的第一加速度信息,包括: 获取速度传感器采集的车轮速度,并将车轮速度中的最小值确定为车辆的行驶速 度;其中,车轮速度包括各个轮子的速度; 计算车辆的行驶速度在设定数量的采样周期内的变化率,确定为第一加速度信 息。 进一步地,根据所述第一加速度信息和所述第二加速度信息确定初始估计坡度, 包括: 将所述第二加速度信息与所述第一加速度信息取差值; 将所述差值除以重力加速度,获得初始估计坡角; 根据所述初始估计坡角确定初始估计坡度。 进一步地,根据所述第一加速度信息确定坡度修正系数,包括: 若所述第一加速度超过第一设定值,则根据所述第一加速度在第一标定曲线中查 找第一坡度修正系数; 若所述初始估计坡度的变化率超过第二设定值,则根据所述第一加速度在第二标 定曲线中查找第二坡度修正系数; 根据所述第一坡度修正系数和/或所述第二坡度修正系数确定最终坡度修正系 4 CN 111731309 A 说 明 书 2/7 页 数。 进一步地,根据所述第一坡度修正系数和所述第二坡度修正系数确定最终坡度修 正系数,包括: 将所述第一坡度修正系数和所述第二坡度修正系数相乘,获得最终的坡度修正系 数。 进一步地,第一标定曲线的获取方式为: 采集车辆在不同路况行驶过程中的加速度和坡度; 对加速度和坡度间的对应关系进行标定,获得第一标定曲线。 进一步地,第二标定曲线的获取方式为: 获取车辆在不同工况下的加速度和标定系数; 利用插值法对获得的加速度和标定系数进行处理,获得第二标定曲线。 第二方面,本发明实施例还提供了一种坡度估计装置,包括: 第一加速度信息确定模块,用于根据车辆的行驶速度确定车辆的第一加速度信 息; 第二加速度信息检测模块,用于获取车身电子稳定系统检测到的第二加速度信 息; 初始估计坡度确定模块,用于根据所述第一加速度信息和所述第二加速度信息确 定初始估计坡度; 坡度修正系数确定模块,用于根据所述第一加速度信息确定坡度修正系数; 目标估计坡度获取模块,用于根据所述坡度修正系数对所述初始估计坡度进行修 正,获得目标估计坡度。 第三方面,本发明实施例还提供了一种计算机设备,包括存储器、处理器及存储在 存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如本发明实 施例所述的坡度估计方法。 第四方面,本发明实施例还提供了一种车辆,包括车辆定位装置,所述车辆定位装 置用于实现如本发明实施例所述的坡度估计方法。 本发明实施例,首先根据车辆的行驶速度确定车辆的第一加速度信息,然后获取 车身电子稳定系统检测到的第二加速度信息,然后根据第一加速度信息和第二加速度信息 确定初始估计坡度,再然后根据第一加速度信息确定坡度修正系数,最后根据坡度修正系 数对初始估计坡度进行修正,获得目标估计坡度。本发明实施例提供的坡度估计方法,根据 由第一加速度信息确定的坡度修正系数对初始估计坡度进行修正,可以提高车辆行驶过程 中坡度估计的准确性。 附图说明 图1是本发明实施例一中的一种坡度估计方法的流程图; 图2是本发明实施例二中的一种坡度估计装置的结构示意图; 图3是本发明实施例三中的一种计算机设备的结构示意图; 图4是本发明实施例四中的一种车辆的结构示意图。 5 CN 111731309 A 说 明 书 3/7 页











