
技术摘要:
本发明公开了数字孪生智能综采工作面液压支架直线度监测方法,包含以下步骤:(1)建立智能综采工作面液压支架三维模型;(2)对液压支架关键参数进行监测和降噪处理;(3)获得实时同步的液压支架数字孪生模型;(4)对不同曲度状态下的液压支架进行直线度仿真计算;(5)利用自 全部
背景技术:
液压支架是机械化采煤工作面重要的支护设备。智能综采工作面液压支架若能排 列成一条直线,就能可靠而有效地支撑和控制工作面的顶板、隔空采空区、防止矸石进入回 采工作面和推进输送机,实现矿井智能安全开采与支护。 目前,我国采煤工作面液压支架的直线度一般多采用人工拉线或激光对准的方式 进行控制,存在人工劳动强度大、效率低、精度差等问题。近些年,人们提出了希望数字虚体 空间中的虚拟事物与物理实体空间中的实体事物之间具有可以联接通道、可以相互传输数 据和指令的交互关系之后,数字孪生的概念就成形了。将数字孪生技术应用在生产装备生 产之前,就可以通过虚拟生产的方式来模拟在不同产品、不同参数、不同外部条件下的生产 过程,实现对产能、效率以及可能出现的技术瓶颈等问题进行提前预警或误差修正,从而提 高产品质量和设备可靠性。本发明将数字孪生应用于智能综采工作面液压支架直线度监 测,能够实时同步地表征智能综采工作面液压支架的运动状态和运行指标,能够通过虚拟 模型与物理实体之间的交互反馈,对虚拟模型进行实时更新,并通过实时更新的模型对综 采工作面液压支架的直线度进行分析和调整,及时消除智能综采工作面液压支架移架作业 出现直线度偏差较大等问题,克服现有方法对综采工作面液压支架直线度监测精准度方面 的不足。
技术实现要素:
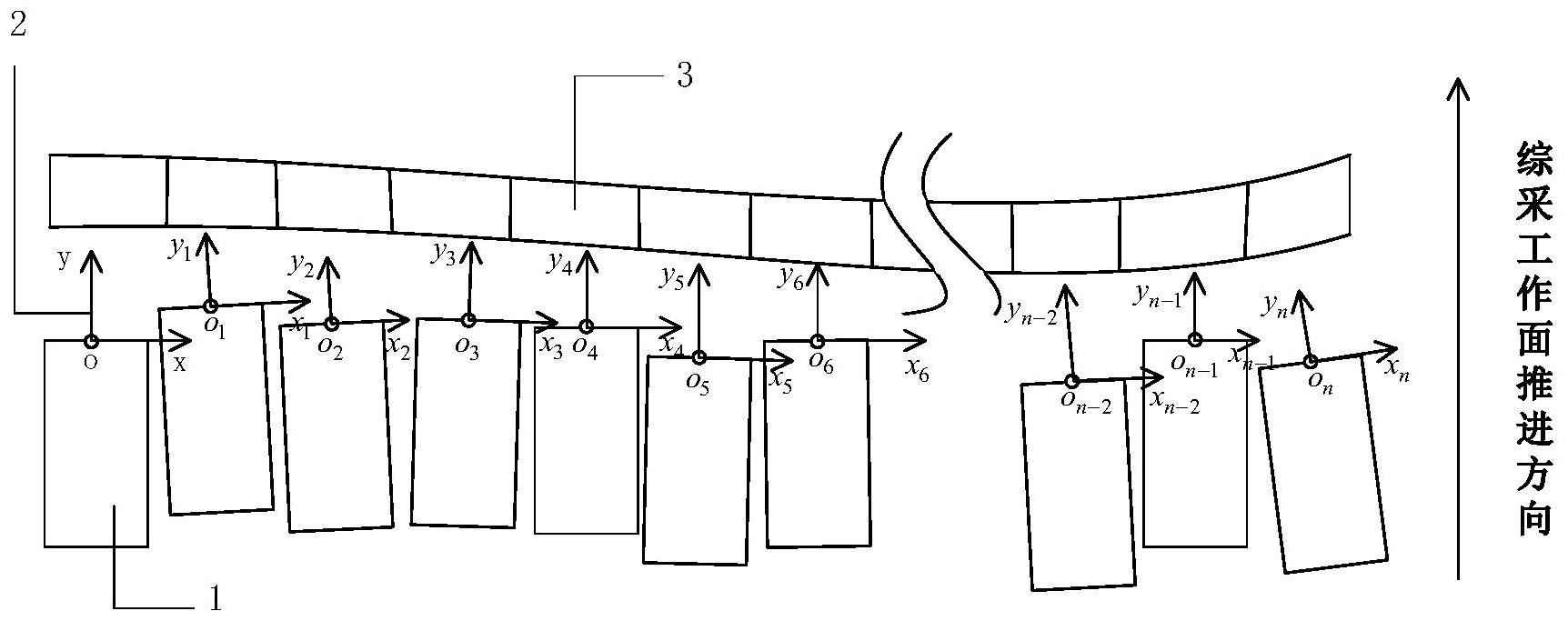
为解决上述技术问题,本发明提出一种基于数字孪生的智能综采工作面液压支架 直线度监测方法,解决现有方法对液压支架直线度的监测精准度不足,造成监测结果失准 的问题。 本发明采用的技术方案是:发明一种基于数字孪生的智能综采工作面液压支架直 线度监测方法,该方法利用智能综采工作面液压支架数字孪生模型的运行数据以及液压支 架间的坐标系转换关系训练自适应深度学习神经网络,据此实现对所述液压支架直线度的 监测与调整,包括以下步骤: 步骤1,通过现场测量获得智能综采工作面液压支架的几何参数、结构参数、材料 参数以及物理作用关系,利用CAE建模软件以及三维扫描设备,建立智能综采工作面液压支 架三维模型; 步骤2,对智能综采工作面液压支架的几何参数、结构参数、姿态参数进行监测和 降噪处理,并对物理实体与三维模型之间数据不断迭代、同步更新和交互映射,从而获得实 时同步的智能综采工作面液压支架数字孪生模型; 步骤3,对智能综采工作面液压支架在不同弯曲状态进行直线度仿真计算,根据液 4 CN 111723448 A 说 明 书 2/5 页 压支架间的坐标转换关系,得到液压支架达到直线状态时各液压支架的移架距离和旋转角 度; 步骤4,将智能综采工作面液压支架直线度仿真计算的数据导入到自适应深度学 习网络中,并对液压支架的直线度进行拟合修正。 所述智能综采工作面液压支架三维模型的建立过程包含以下步骤: 步骤1,现场测量获得液压支架的几何参数、结构参数、材料参数以及物理作用关 系; 步骤2,利用CAE建模软件UG和激光扫描法对综采工作面液压支架进行1:1建模,并 对所述液压支架各设备运动关键点进行标记,保证物理实体与虚拟模型的一致性和完整 性; 步骤3,将步骤2中的模型导入到3ds max中进行渲染,进而添加材质,对建模过程 中模型边缘不理想的部分进行优化修补,使得模型在视觉效果上具有更强的真实感; 步骤4,将步骤3中的模型导入到Unity 3D中,利用其内置的物理引擎、脚本编辑 器、c#语言实现对智能综采工作面液压支架三维模型的构建。 所述实时同步的智能综采工作面液压支架数字孪生模型建立过程,包含以下步 骤: 步骤1,在综采工作面每台液压支架的底座安装捷联惯导装置,测得液压支架的姿 态参数; 步骤2,调整智能综采工作面首端的第一台液压支架呈直线状态,并使其与工作面 推进方向垂直,以该台液压支架的移架距离为标准移架距离,并以该台液压支架建立全局 参考坐标系; 步骤3,利用智能综采工作面液压支架间的坐标系转换关系得出各个液压支架的 移架距离、姿态参数以及达到直线状态时需要移架的距离和偏移角; 步骤4,将智能综采工作面采集到的液压支架的姿态参数、几何参数、材料参数、移 架距离数据,经高速传输网络和数据接口输入到液压支架数字孪生模型中,对液压支架的 直线度进行仿真计算; 步骤5,对采集到的智能综采工作面液压支架数据进行降噪处理,并进行直线度仿 真计算; 步骤6,将步骤4中未降噪的数据驱动的模型仿真计算结果与步骤4中经过降噪处 理过的数据驱动的模型的仿真计算结果进行比较,并计算两者的差值; 步骤7,根据步骤6中计算出的偏差值,利用扩展卡尔曼滤波算法对物理模型的内 部参数进行迭代和修正,从而获得能够实时同步的智能综采装备数字孪生模型。 所述对智能综采工作面不同弯曲状态下的液压支架进行直线度仿真计算,包括以 下步骤: 步骤1,利用实时同步的智能综采工作面液压支架数字孪生模型,对不同弯曲程度 的液压支架进行直线度仿真计算,根据液压支架间的坐标系转换关系,求解出各液压支架 的移架距离与标准移架距离之间的差值及液压支架达到直线状态时应偏移的角度; 步骤2,根据步骤1中计算出的移架偏差值和偏移角度,对液压支架的移架距离和 方向角进行更新,并据此建立智能综采工作面在不同弯曲状态下的液压支架调直数据库。 5 CN 111723448 A 说 明 书 3/5 页 所述BP神经网络的生成过程包括以下步骤: 步骤1,利用所述液压支架调直数据库中75%的数据作为训练数据,25%的数据作 为测试数据,在Matlab中利用神经网络工具箱训练对应的BP神经网络,并设定训练阈值; 步骤2,根据已知智能综采工作面液压支架群的弯曲状态和各液压支架的实际姿 态角,求解液压支架实际的移动距离和旋转角; 步骤3,利用步骤1中训练得到的BP神经网络,对智能综采工作面采集到的实时液 压支架参数进行训练,直至液压支架的直线度仿真效果达到训练阈值为止。 本发明的有益效果在于: 本发明利用综采工作面液压支架数字孪生模型对不同弯曲状态下的液压支架直 线度进行拟合,实现液压支架物理实体与数字孪生体之间的数据实时同步、迭代交互,本发 明利用自适应深度学习神经网络,实现对综采工作面液压支架直线度的实时监测与精准调 整。 附图说明 图1为数字孪生智能综采工作面液压支架直线度监测方法的流程图 图2为智能综采工作面液压支架三维模型的构建流程图 图3为智能综采工作面液压支架之间的坐标关系图 图4为智能综采工作面液压支架自适应深度学习神经网络的生成过程











