
技术摘要:
在一个实施方式中,本文中描述的是用于过滤障碍物以减少自动驾驶车辆(ADV)在给定的规划阶段中处理的障碍物的数量的系统和方法。ADV可以基于ADV正在行进的第一车道中的标准集来识别障碍物的第一集合,过滤掉第一车道中的剩余障碍物,并且从ADV的角度将每个识别的障碍物 全部
背景技术:
以自动驾驶模式运行(例如,无人驾驶)的车辆可以将乘员、尤其是驾驶员从一些 驾驶相关的职责中解放出来。当以自动驾驶模式运行时,车辆可以使用车载传感器和高分 辨率的地图导航到各个位置,从而允许车辆在最少人机交互的情况下或在没有任何乘客的 一些情况下行驶。 自动驾驶车辆(ADV)依赖于由传感器检测的实时交通和本地环境数据来规划每个 规划阶段中的最佳路线。ADV的感知区域中的障碍物(例如,对象和附近的车辆)可以影响 ADV的规划。感知区域中的障碍物越多,规划ADV下一步行动所需的时间就越多。因此,将期 望过滤掉一些障碍物,以提高ADV的规划效率,同时不影响ADV的安全性。
技术实现要素:
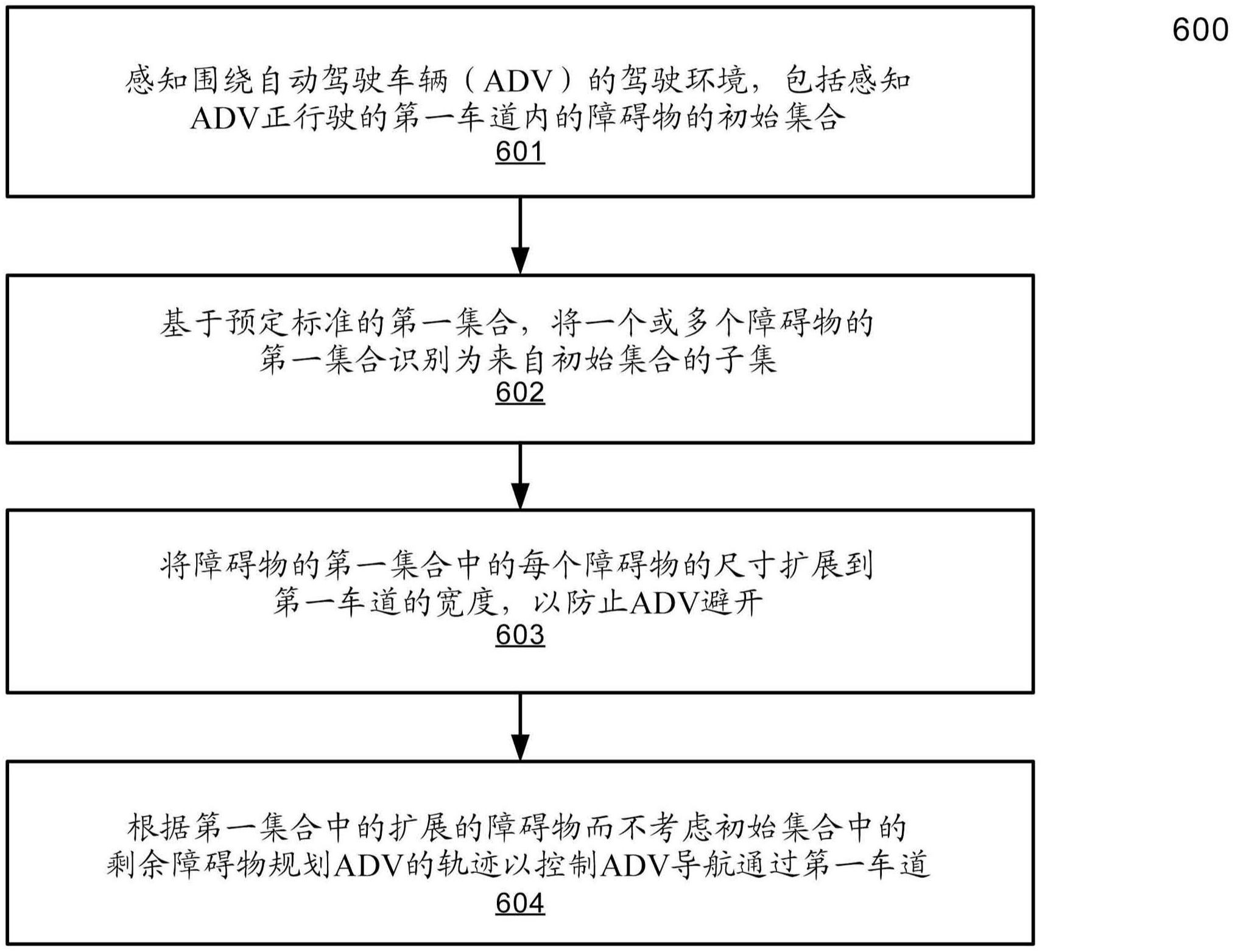
在本公开的一方面中,本公开的实施方式提供了一种用于操作自动驾驶车辆的计 算机实施的方法,该方法包括:感知围绕自动驾驶车辆(ADV)的驾驶环境,包括感知ADV正行 驶的第一车道内的障碍物的初始集合;基于预定标准的第一集合,将一个或多个障碍物的 第一集合识别为来自障碍物的初始集合的子集;将障碍物的第一集合中的每个障碍物的尺 寸扩展到第一车道的宽度,以防止ADV避开障碍物的第一集合中的任何障碍物;以及根据障 碍物的第一集合中的扩展的障碍物而不考虑初始集合中的剩余障碍物规划ADV的轨迹以控 制ADV导航通过第一车道。 在本公开的另一方面中,本公开的实施方式提供了一种存储有指令的非暂时性机 器可读介质,所述指令在由处理器执行时使处理器执行操作,所述操作包括:感知围绕自动 驾驶车辆(ADV)的驾驶环境,包括感知ADV正行驶的第一车道内的障碍物的初始集合;基于 预定标准的第一集合,将一个或多个障碍物的第一集合识别为来自障碍物的初始集合的子 集;将障碍物的第一集合中的每个障碍物的尺寸扩展到第一车道的宽度,以防止ADV避开障 碍物的第一集合中的任何障碍物;以及根据障碍物的第一集合中的扩展的障碍物而不考虑 初始集合中的剩余障碍物规划ADV的轨迹以控制ADV导航通过第一车道。 在本公开的另一方面中,本公开的实施方式提供了一种数据处理系统,该系统包 括处理器;以及存储器,联接到处理器以存储指令,所述指令在由处理器执行时使处理器执 行操作,所述操作包括:感知围绕自动驾驶车辆(ADV)的驾驶环境,包括感知ADV正行驶的第 一车道内的障碍物的初始集合;基于预定标准的第一集合,将一个或多个障碍物的第一集 合识别为来自障碍物的初始集合的子集;将障碍物的第一集合中的每个障碍物的尺寸扩展 到第一车道的宽度,以防止ADV避开障碍物的第一集合中的任何障碍物;以及根据障碍物的 第一集合中的扩展的障碍物而不考虑初始集合中的剩余障碍物规划ADV的轨迹以控制ADV 4 CN 111615477 A 说 明 书 2/12 页 导航通过第一车道。 附图说明 本公开的实施方式在附图的各图中以举例而非限制的方式示出,附图中的相同的 附图标记指代相似的元件。 图1是示出根据一个实施方式的网络化系统的框图。 图2是示出根据一个实施方式的自动驾驶车辆的示例的框图。 图3A至图3B是示出根据一个实施方式的与自动驾驶车辆一起使用的感知与规划 系统的示例的框图。 图4示出了根据实施方式的由ADV用来过滤掉障碍物的示例性系统。 图5A至图5B是示出根据实施方式的如何在非避开场景中过滤掉障碍物的示例性 图。 图6示出根据过滤掉障碍物的方法图6是示出根据实施方式的过滤掉障碍物的示 例性过程的流程图。 图7是示出可以与本公开的一个实施方式一起使用的数据处理系统的示例的框 图。











