
技术摘要:
本发明提供一种能够高精度地推断具有非线性悬架特性的车辆的弹跳运动的状态量的车辆、车辆运动状态推断装置、以及车辆运动状态推断方法。本发明的车辆运动状态推断装置是车轮与车体经由悬架结合在一起的车辆上的车辆运动状态推断装置,具有:弹跳运动推断部,其根据车 全部
背景技术:
作为获取车辆的弹跳运动状态量的方法,除了使用车高传感器和上下加速度传感 器等专用传感器直接进行检测的方法以外,还有例如像专利文献1记载的那样利用轮速传 感器等平常车载的传感器、使用车辆动态模型而不使用专用传感器来进行推断的方法。 现有技术文献 专利文献 专利文献1:日本专利特开2012-47553号公报
技术实现要素:
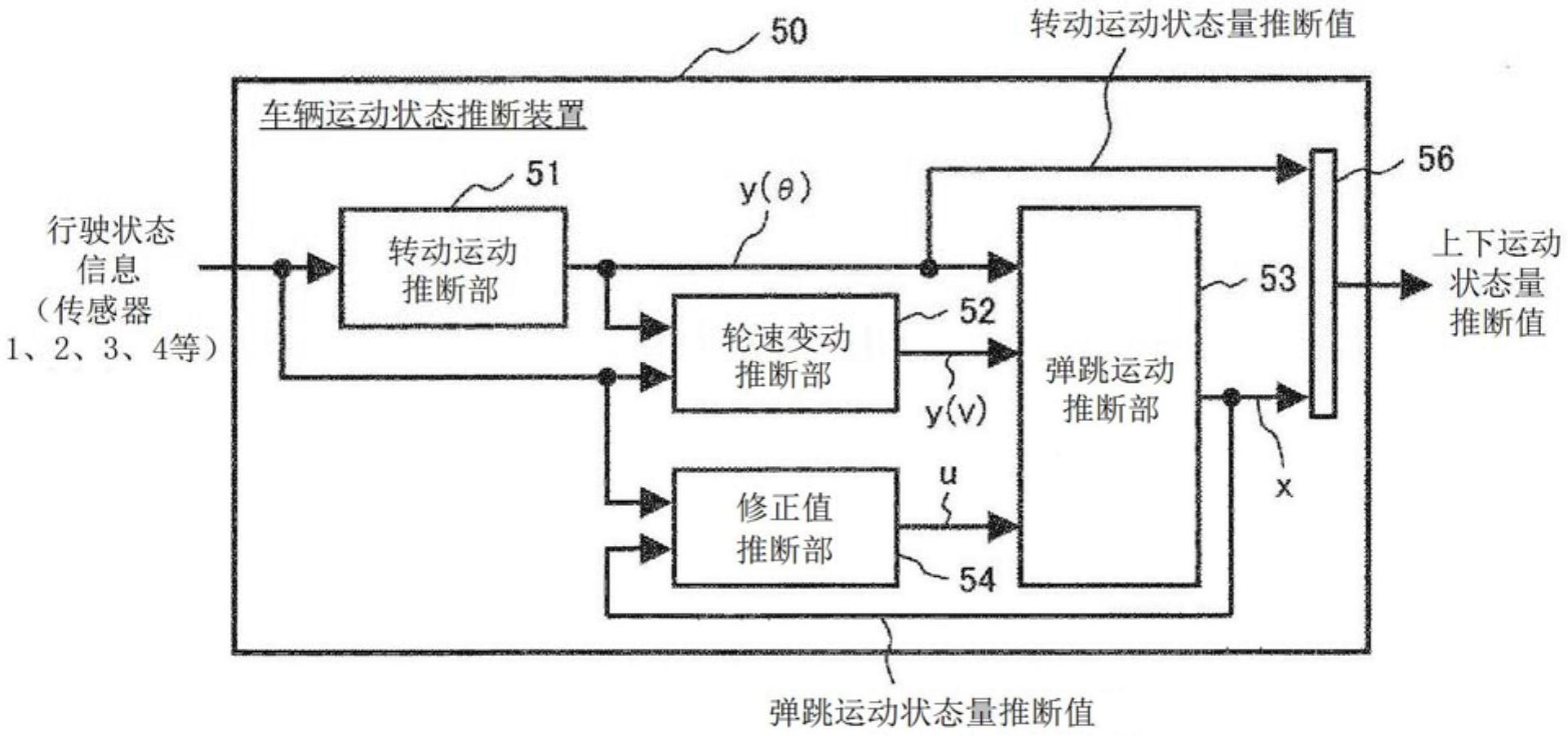
发明要解决的问题 然而,在专利文献1记载的弹跳运动状态量的推断方法中,悬架的特性尤其是车体 与车轮的上下方向的相对位移与车轮的前后位移的关系假定的是线性,在所述关系运用于 非线性的车辆的情况下,弹跳运动状态量的推断精度有可能大幅降低。 本发明是为了解决所述问题,其目的在于提供一种在车体与车轮的上下方向的相 对位移与车轮的前后位移的关系为非线性的车辆中能够高精度地推断弹跳运动状态量的 车辆、车辆运动状态推断装置以及车辆运动状态推断方法。 解决问题的技术手段 出于以上原因,本发明如下:“一种车辆运动状态推断装置,其为车轮与车体经由 悬架结合在一起的车辆上的车辆运动状态推断装置,具有:弹跳运动推断部,其根据车辆的 行驶状态信息来推断并输出车辆的弹跳运动的状态量;以及修正值推断部,其根据弹跳运 动推断部的输出来算出对弹跳运动推断部的输出进行修正的修正值;修正值推断部考虑悬 架的非线性特性来算出修正值”。 此外,本发明如下:“一种车辆运动状态推断装置,其为车轮与车体经由悬架结合 在一起的车辆上的车辆运动状态推断装置,具有:上下运动推断部,其根据车辆的行驶状态 信息来推断并输出车辆的上下运动的状态量;以及修正值推断部,其根据上下运动推断部 的输出来算出对上下运动推断部的输出进行修正的修正值;修正值推断部考虑悬架的非线 性特性来算出修正值”。 此外,本发明如下:“一种车辆,其中,车轮与车体经由悬架结合在一起,该车辆搭 载有制动驱动控制单元、操舵控制单元及车辆运动状态推断装置,所述制动驱动控制单元 控制制动驱动,所述操舵控制单元控制车轮的操舵角,所述车辆运动状态推断装置将输出 给予制动驱动控制单元及操舵控制单元,该车辆运动状态推断装置的特征在于, 车辆运动状态推断装置是根据技术方案1至8中任一项所述的车辆运动状态推断装 4 CN 111615480 A 说 明 书 2/14 页 置”。 此外,本发明如下:“一种车辆运动状态推断方法,其为车轮与车体经由悬架结合 在一起的车辆上的车辆运动状态推断方法,其特征在于,根据车辆的行驶状态信息来推断 车辆的上下运动的状态量,根据车辆的上下运动的状态量来算出其修正值,而且,修正值是 考虑了悬架的非线性特性的修正值”。 此外,本发明如下:“一种车辆运动状态推断方法,其为车轮与车体经由悬架结合 在一起的车辆上的车辆运动状态推断方法,其特征在于,根据车辆的行驶状态信息来求车 辆的转动运动状态量,根据行驶状态信息和转动运动状态量来求轮速变动量,根据转动运 动状态量和轮速变动量来求车辆的弹跳运动量,将弹跳运动量和转动运动状态量作为车辆 的上下运动状态量,而且,根据行驶状态信息和弹跳运动量或上下运动状态量来求弹跳运 动量或上下运动状态量的修正值,修正值是考虑了悬架的非线性特性的修正值”。 发明的效果 根据本发明,不论悬架特性是线性还是非线性,都能高精度地推断车辆运动状态。 附图说明 图1为表示搭载有实施例1的车辆运动状态推断装置50的车辆构成例的图。 图2为表示实施例1的车辆运动状态推断装置50的概念构成例的图。 图3为表示实施例1的4轮车平面模型的图。 图4为表示实施例1的4轮整车模型的图。 图5为表示实施例1的因车体纵倾而发生的轮速变动的图。 图6为表示实施例1的因悬架的位移而发生的轮速变动的图。 图7为表示实施的相对位移与前后位移的线性关系的图。 图8为表示实施的因接地载荷变动而发生的轮速变动的图。 图9为表示实施的接地载荷与轮胎有效转动半径的关系的图。 图10为表示实施例1的车辆上下运动量推断装置50得到的处理结果的时间变化的图。 图11为表示实施例2的车辆运动状态推断装置50的概念构成例的图。 图12为表示搭载有实施例3的车辆运动状态推断装置50的车辆构成例的图。 图13为表示实施例3的悬架控制单元81的概念构成例的图。 图14为表示实施例3的悬架控制单元81得到的处理结果的时间变化的图。











